Hi Mirko,
Production is on going and we expect to have full stock available by the end of the month, pre-order is available.
Thank you so much, Does this component have the integrated compass ?
1 Like
No, it has not an integrated compass (magnetometer).
If two simpleRTK2Blite are combined (or one simpleRTK2B+simpleRTK2Blite), you can get extremely accurate heading based on a moving base configuration.
As far as I know, the parser for the specific message containing this information is not yet implemented in Ardupilot software.

1 Like
I cut this from another thread…
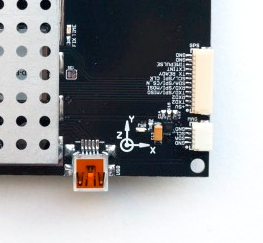
Ok now that I am looking at the right GPS…Yes it has a compass. you can see the orientation
Also it’s listed in the description
https://www.csgshop.com/product.php?id_product=266
I also watched a video that said the Here Pro will have full FC capabilities.
1 Like
Thank you for your help.
But I’m not quite understand the moving base configuration ? Does it mean the combined GPS board (Ardusimple + Ardusimplelite) all installed on the vehicle ? Or one of them still need to be set on a specific location on the ground as static base ?
With the moving base configuration, both simpleRTK2B+simpleRTK2Blite are installed in the vehicle.
With this units, you will get high accuracy heading without the need of a static base station or NTRIP corrections (the longer the distance between the antennas the higher the accuracy).
If you also want to have cm level position, you can either:
- Use an additional static base (in the ground)
- Use NTRIP corrections
Let me know if you have any doubts
2 Likes
Thank you Josep, can I use the moving base configuration with Pixhawk ? Also since the two antennas will be installed on the vehicle, so the distance between them cannot be very far. How accurate it will be if two antennas are very close with each other (around 300mm ) ?
Hi Josep,
For the Ardusimplelite, does it also support standalone & SSR correction ?
Hello Mirko,
Right now and as far as I know, Pixhawk doesn’t support the moving baseline functionality, although is relatively easy to implement for the developers.
The heading accuracy can be defined as:
heading_accuracy = atan(2/distance), where distance is the distance between antennas in cm.
30cm: 3.8deg
1m: 1.14deg
10m: 0.11deg
…
This is an approximation, but the final numbers should be the same order of magnitude.
simpleRTK2Blite will support standalone operation + RTCM corrections.
SSR corrections will be supported in a future firmware release by u-blox (no dates available yet).
Hello everyone,
I need your help to list the cables and connectors used by the most common autopilots.
Pixhawk 4 uses JST-GH male-male 6 pin not-crossed cable.
What about other autopilots?
Thanks,
Josep
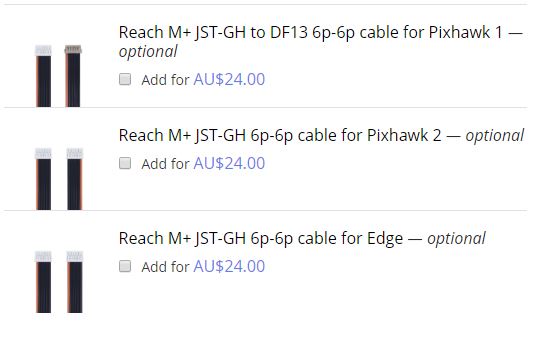
This is what I can find. Anyone else can help with this ?
Another question I have is that how Ardusimplelite connects with Internet to receive NTRIP corrects when it is moving on the vehicle ? I understand it can connect with Internet using USB cable and a laptop, but when it’s moving on the vehicle, I don’t think it is suitable to still use the USB cable
The ntrip corrections are passed up to the vehicle over mavlink from the gcs - so you need a telemetry datalink.
It would be possible to do it directly on the vehicle if the vehicle has a companion computer and 3/4/5G internet link, but that’s more complex than most people need or want
@Mirko_Zhou thanks for the cable information!
Apart from the options mentioned by @james_pattison, you can also use a dedicated radio link only for receiving corrections.
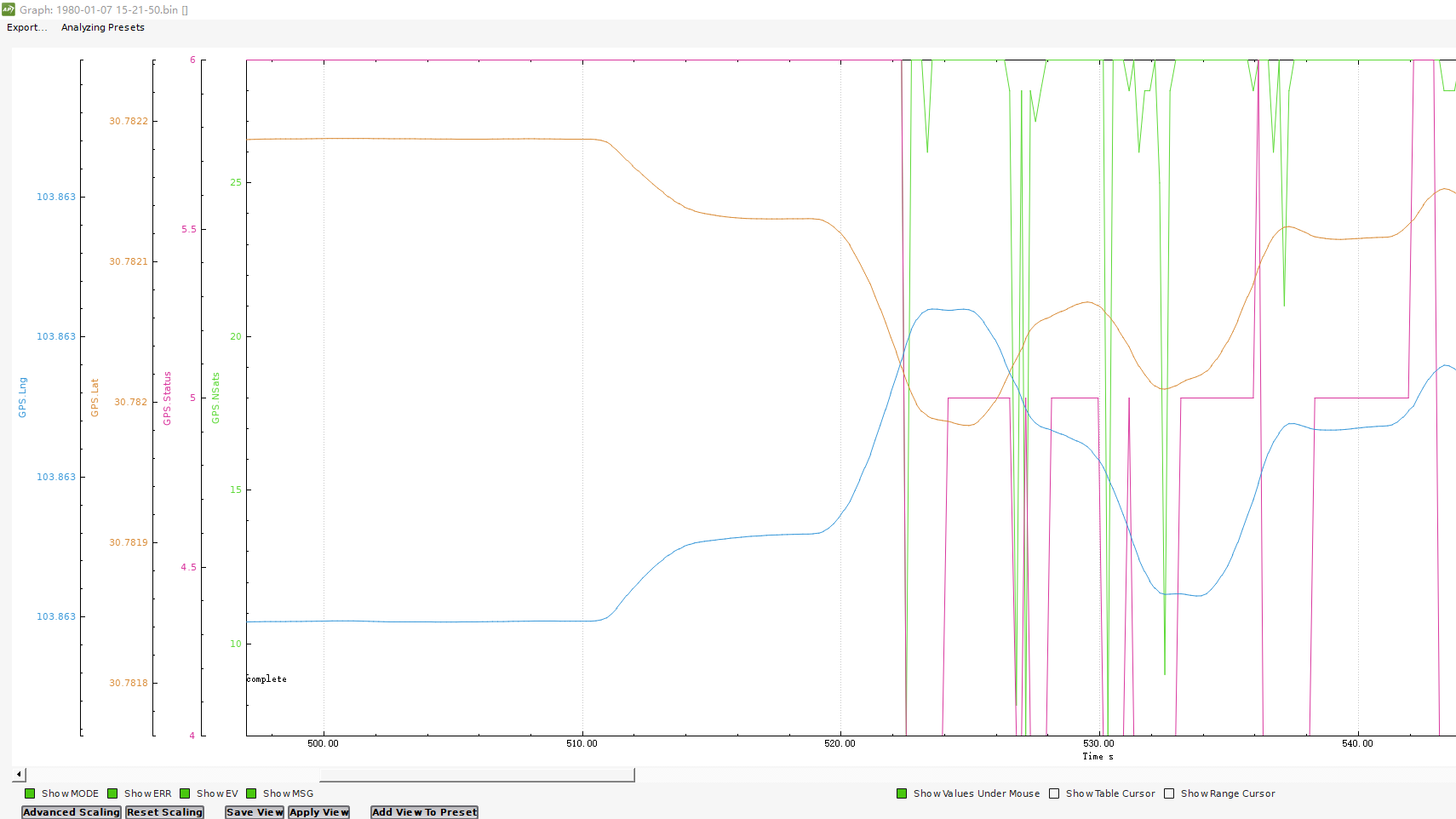
F9p RTK fixed is unstable, especially when braking suddenly, satellite is lost and positioning status is lost. But height and location data seem to be continuous.
I have some setting suggestions for you. In ucenter under nav5 - change your elevation mask to 15 -13 degrees, set the SNR value to 35-40db. You do not need more than 13-18 sv’s for a good RTK fix. If you are in harsh GPS environments use the slightly lower settings. In the open stay with 15 deg & 40db SNR.
If your signals are low in the sky, they are too weak to use reliably.
When you pitch your vehicle the ground plane will also effectively cut off part of the sky causing a loss of lock.
You may also have a radio issue. I never see my status drop to 4.
thanks very much, i’ll have a try tomorrow.
test log file. could you have a look on it?
