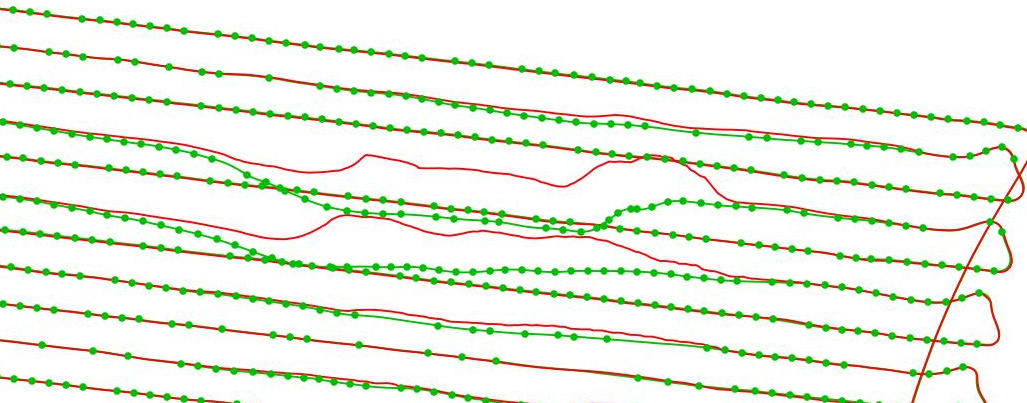
m8p doesn’t have time mark pin so you will not have message in Ublox logs … Not very usefull and if you geotag with ardupilot logs, you will see that EKF introduce a lot of precision and accuracy in trajectory due to EKF itself so not really usable for photogrammetry purpose. I already compared in post flight reach rtk vs pixhawk navigation and there is a huge difference in some turns.
Example : (green = reach, red = pixhawk 1 arduplane logs)
About accuracy and precision of F9T : it depends. Multi band allow quick fix but most of commercial GNSS unit switch from multi to single band if baseline is shorten than 10km to skip noise in phase.
Thanks for the graph and explanation. This brings up a few questions:
I wonder how my drotagx gets the gps data? It’s my understanding that it does not interact through the FC, so I am not manually tagging or checking through the logs.
On the other hand I found tagging data to be worthless anyways, because the elevation reference in ucenter is bogus and not related to a level surface. This is because no geoid files are used by ucenter for the height computation.
Ucenter has a EGM96 geiod model but it’s large grid averaged so elevations are only ellipsoid related. It’s off 5-8 meters in my town, that varies due to geoid heights.
Ground control still the best for now.
Thanks again for the f9t explanation.
If any of you are trying to configure an F9P, this Youtube video was a huge help to me: https://www.youtube.com/watch?v=FpkUXmM7mrc. I had manually done all the steps to get my C099-F9P boards working over the built-in WiFi and it was very hard for me, but I finally got it. I didn’t want to use WiFi in the long term, as I used LoRa for RTCM3 corrections on a C94-M8P system now. Someone pointed out this relatively new video, so I thought I would give it a try. It was super helpful. I think the only changes I made were baud rates.
I am very happy with my F9P system. I have used both the Ublox C099-F9P boards and one Ardusimple SimpleRTK2B. All work awesomely.
Ok didn’t know they use this pin on P series nowaday but even with that for rover, it’s better to have high accuracy timing and you could only have it with T series.
or (looks like this one may work by itself mounted on the copter/drone???)
will either of these work as a replacement for a M8N? or do I have to have a ground station with it?
kind of wish I didn’t upgrade the M8N to 3.01!!!
I just started reading about this RTK tech but I’d like to order the hardware I need since I’m in the USA, Long delivery time…
any info would be greatly appreciated…
thanks
Hi, I’m also wondering if any of the M8"s will be a good upgrade to the M8N, one that can handle GLONASS+GALILEO, etc… at 5khz? I’m not worried about an onboard magnetometer but its nice to have.
If one uses the base and rover configuration while doing photogrammetry, or really any other job where high precision location accuracy is needed, then you will be very satisfied with the results. If later you find that the base location was incorrect, then it would be a simple matter in post to adjust all the rover’s locations by the same deviation mathematically, in post. Easy. In the meantime, all your rover time and location stamps will have high accuracy, even if they are all off, they are all off by the same amount.
Thanks @tridge. Have you tried to use a pair of F9Ps with one as a base?
I’m curious as I tried to use both C94 boards from Ublox and S1216 from Navspark in the same config, one board is a base, another identical one is a rover. What I found strange is, the altitudes reported during the day drift a lot, and the altitudes at the same location can be 10-15m different if recorded on different days. Both systems behaved the same, with navspark having a bit poorer altitude estimation. It would be interesting to see what F9P is capable of before investing in another RTK pair.
It must be your survey in positions causing the error.
Set your base on a point, measure the height of the antenna. Do a survey in. Thensubtract the measure up to the antenna. This is the elevation of your point on the ground. Then when you do your checks, on the base use the same XY and adjust your Z based in your new measure up.