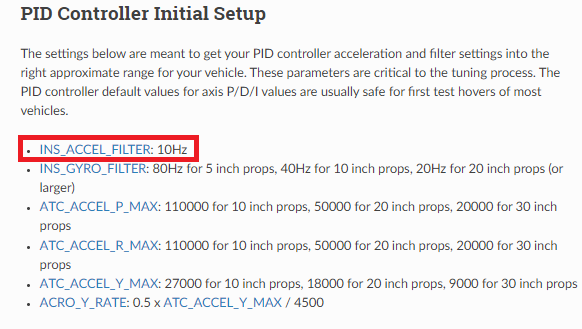
In the ArduPilot wiki on initial setup, it states to set the INS_ACCEL_FILTER to 10Hz.
The default value on firmware installation is 20Hz.
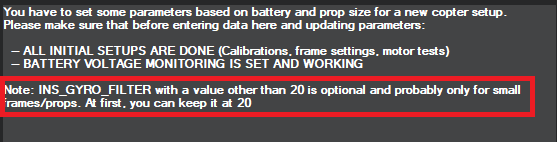
Also - when doing the SETUP/INITIAL PARAMETER SETUP function, it says in a NOTE that you can keep INS_GYRO_FILTER at 20. The note also makes reference to small frames and prop sizes.
But INS_GYRO_FILTER is based on prop size - so this doesn’t make sense to me.
I have a feeling that the note is suggesting that we can keep INS_ACCEL_FILTER=20 - which is the firmware default.
10Hz should be the default for every craft. That note on the Initial Parameter Setup should be updated. You can search the forum here and find some recent dialog about it with Dev input.
The note about “probably only for small frames/props. At first, you can keep it at 20” needs updating too. A 7" or less propped craft will be an oscillating mess with a Gyro filter at 20Hz.
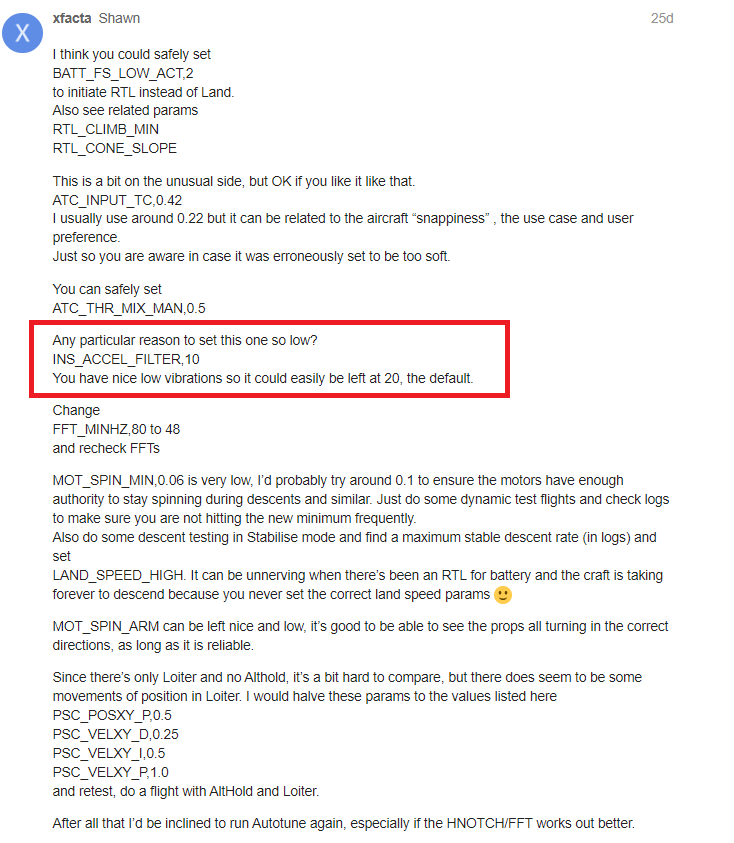
You will find later posts with a different opinion in a thread where Leonard was posting. This isn’t the one but it’s informative in this regard anyway. Use 10Hz
Yeah after that Leonard confirmed it should definitely be INS_ACCEL_FILTER = 10 from now onwards.
There may not be any need to rerun autotune, but it could help if autotune didnt produce expected results.