I think you could safely set
BATT_FS_LOW_ACT,2
to initiate RTL instead of Land.
Also see related params
RTL_CLIMB_MIN
RTL_CONE_SLOPE
This is a bit on the unusual side, but OK if you like it like that.
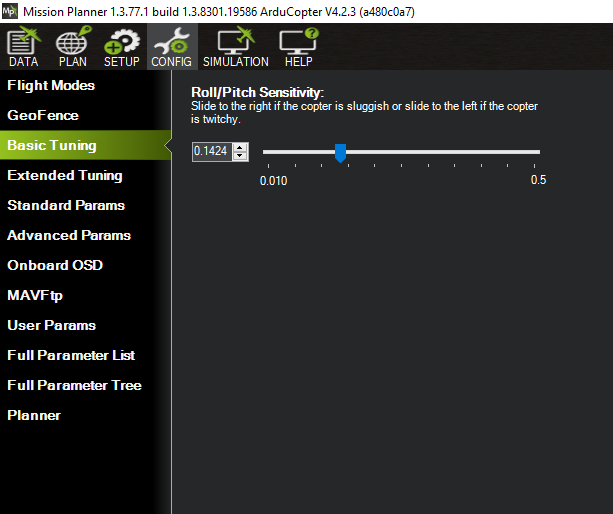
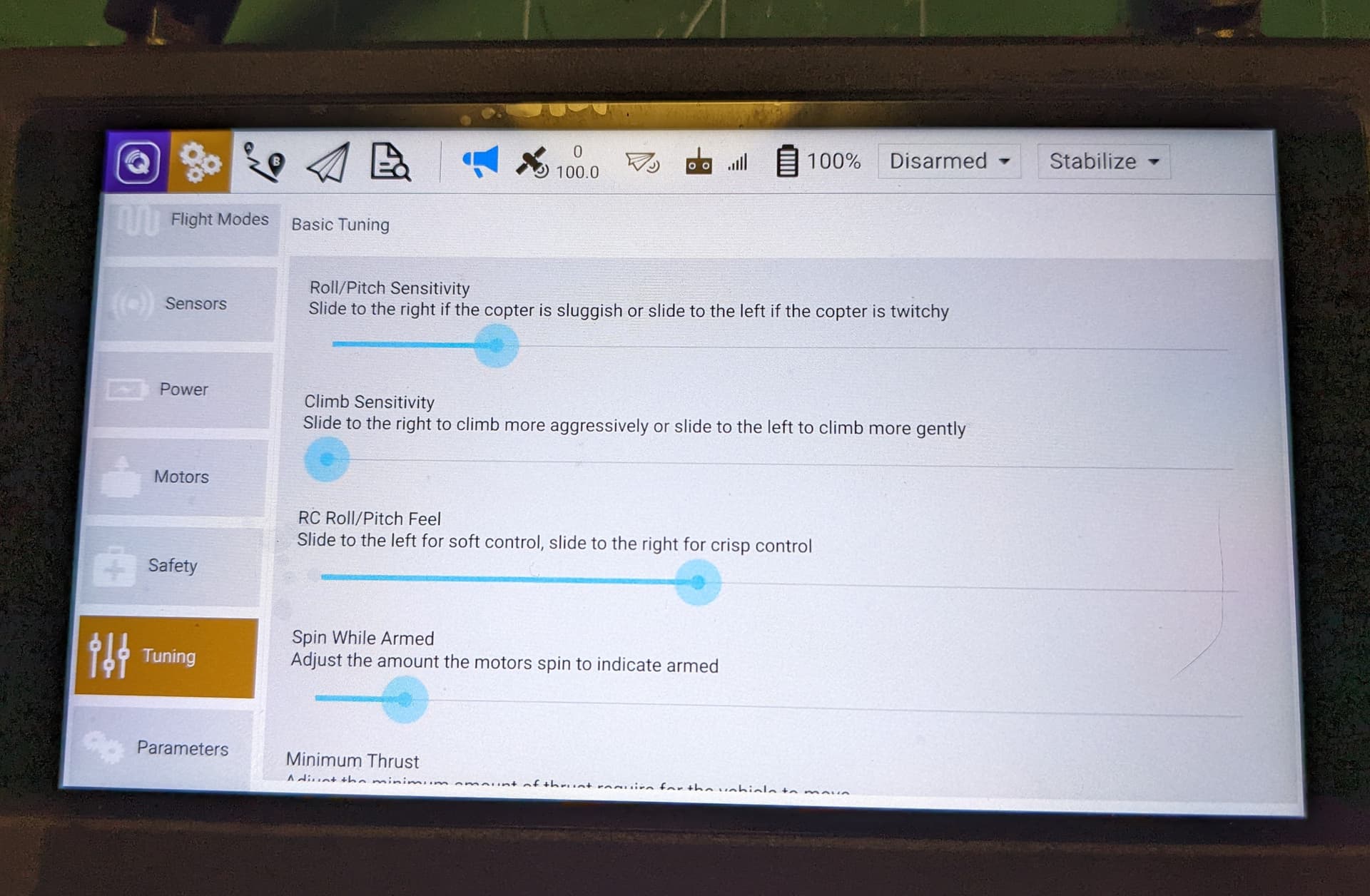
ATC_INPUT_TC,0.42
I usually use around 0.22 but it can be related to the aircraft “snappiness” , the use case and user preference.
Just so you are aware in case it was erroneously set to be too soft.
You can safely set
ATC_THR_MIX_MAN,0.5
Any particular reason to set this one so low?
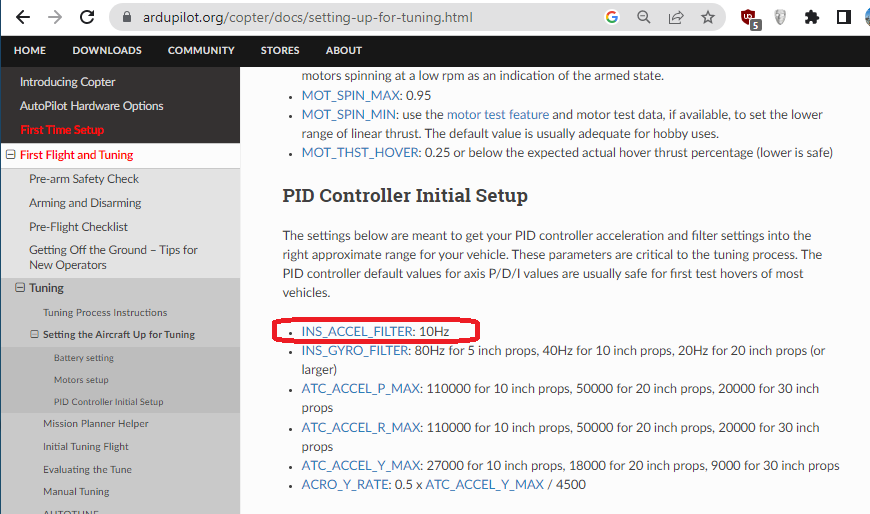
INS_ACCEL_FILTER,10
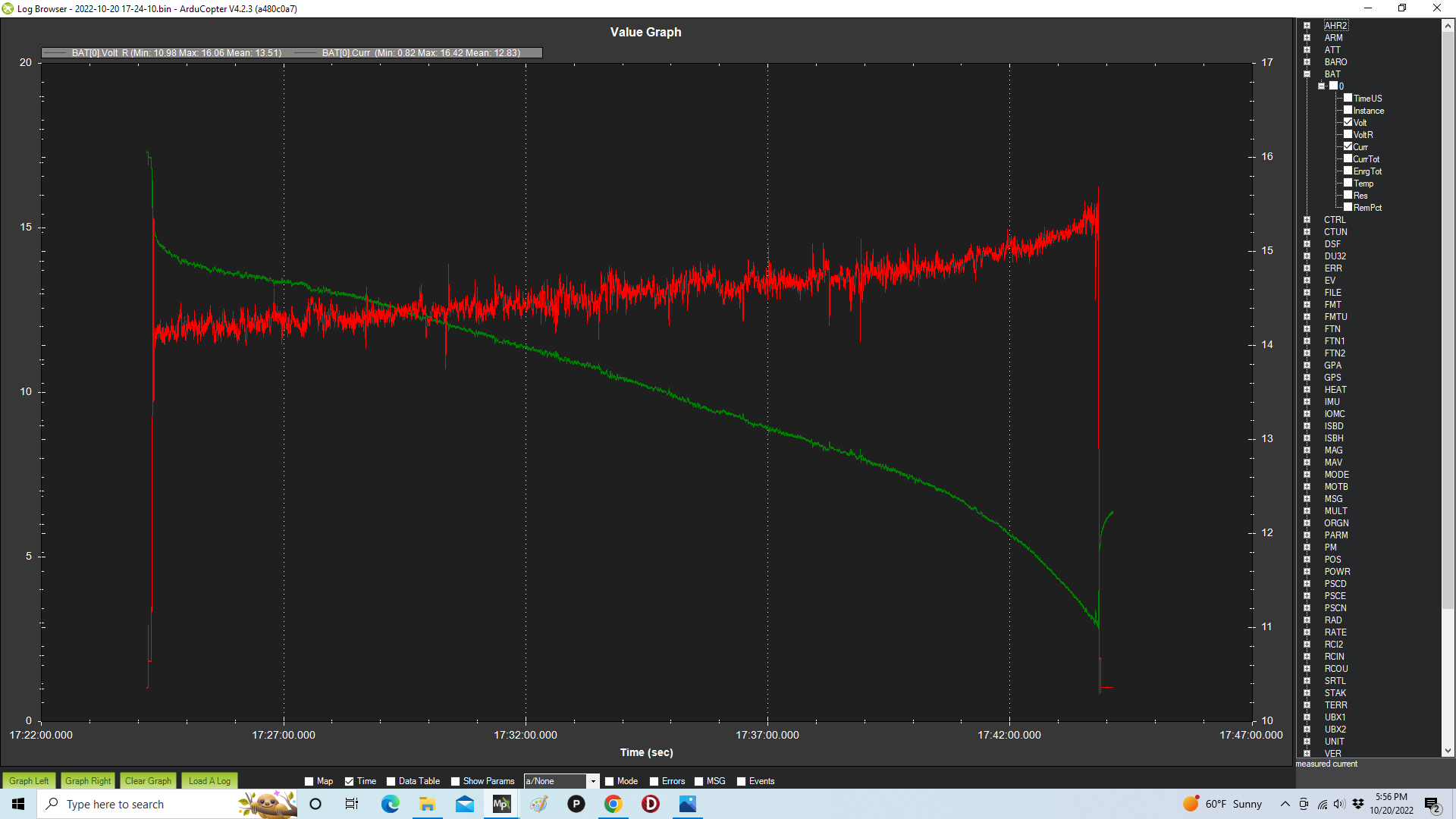
You have nice low vibrations so it could easily be left at 20, the default.
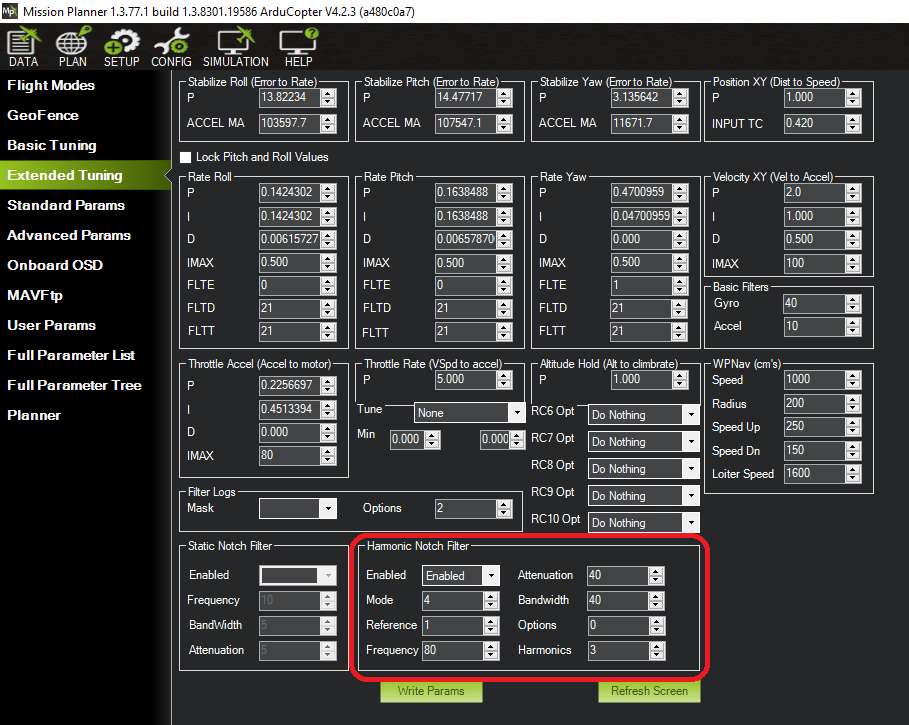
Change
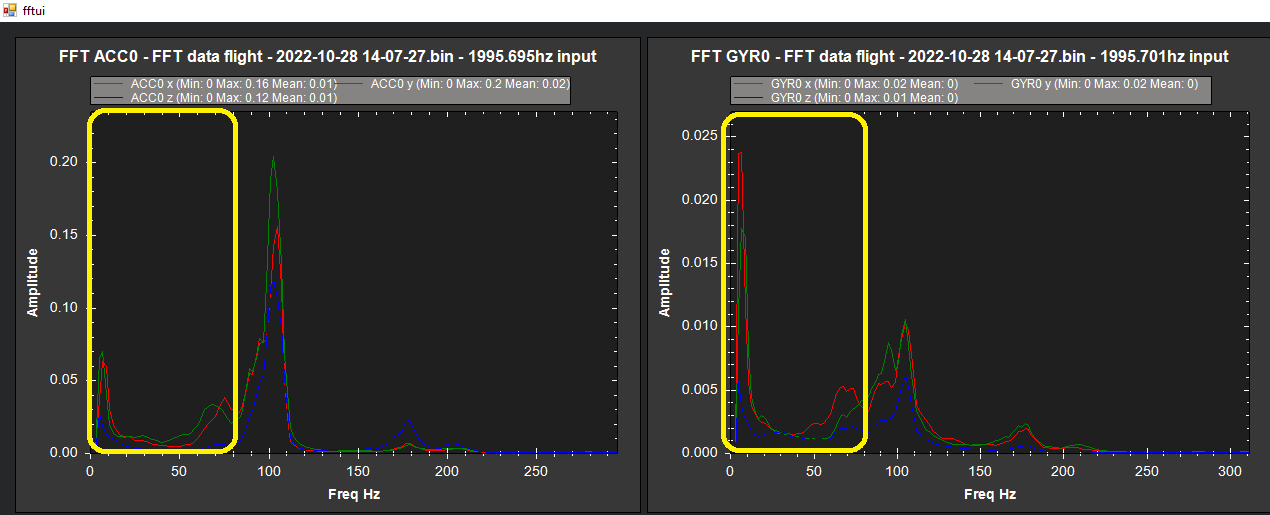
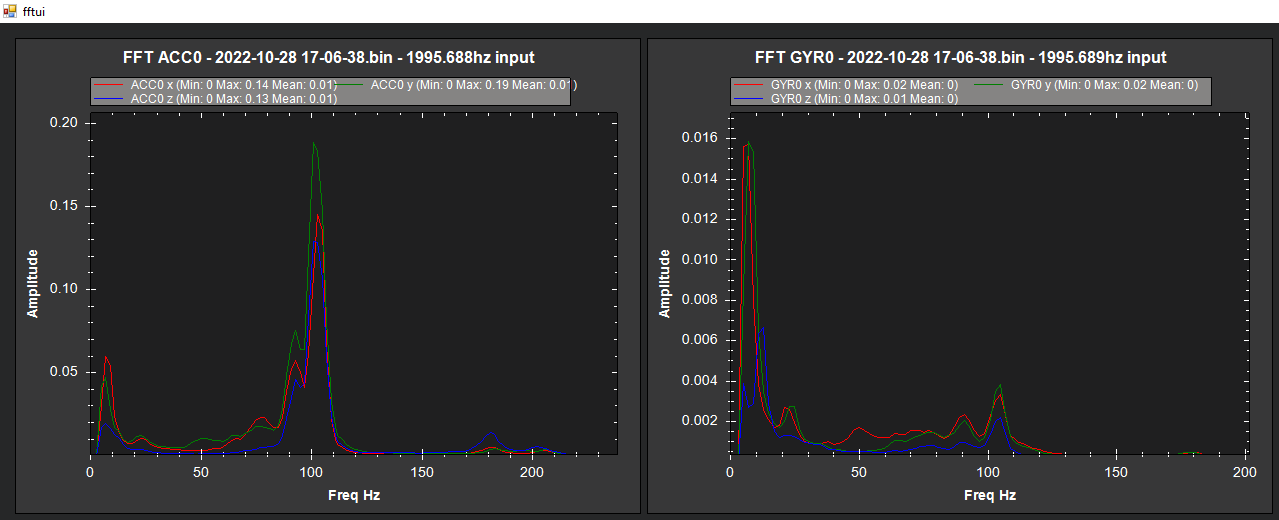
FFT_MINHZ,80 to 48
and recheck FFTs
MOT_SPIN_MIN,0.06 is very low, I’d probably try around 0.1 to ensure the motors have enough authority to stay spinning during descents and similar. Just do some dynamic test flights and check logs to make sure you are not hitting the new minimum frequently.
Also do some descent testing in Stabilise mode and find a maximum stable descent rate (in logs) and set
LAND_SPEED_HIGH. It can be unnerving when there’s been an RTL for battery and the craft is taking forever to descend because you never set the correct land speed params 
MOT_SPIN_ARM can be left nice and low, it’s good to be able to see the props all turning in the correct directions, as long as it is reliable.
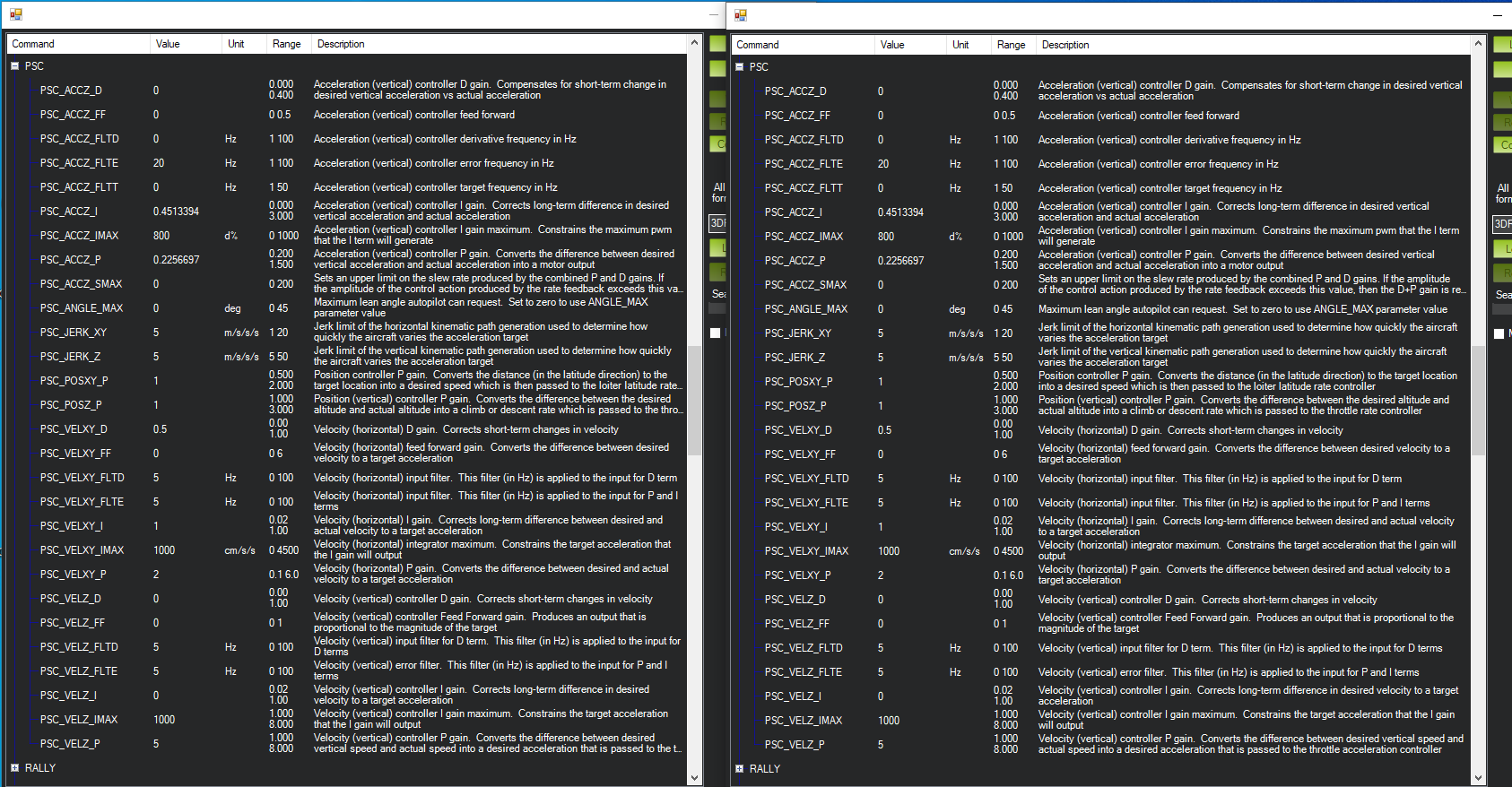
Since there’s only Loiter and no Althold, it’s a bit hard to compare, but there does seem to be some movements of position in Loiter. I would halve these params to the values listed here
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
and retest, do a flight with AltHold and Loiter.
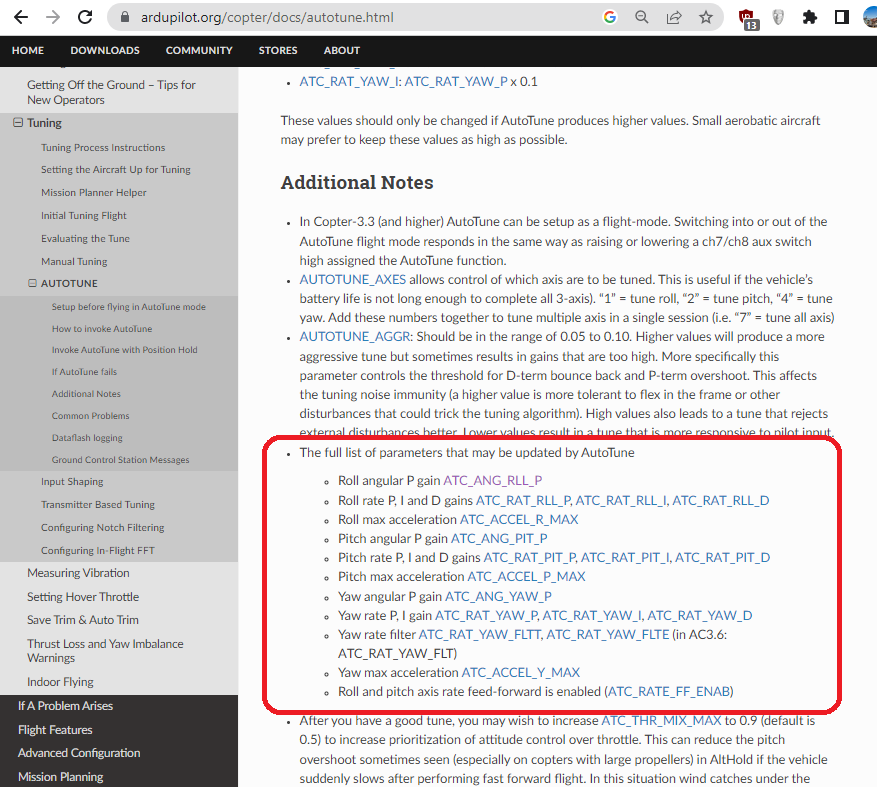
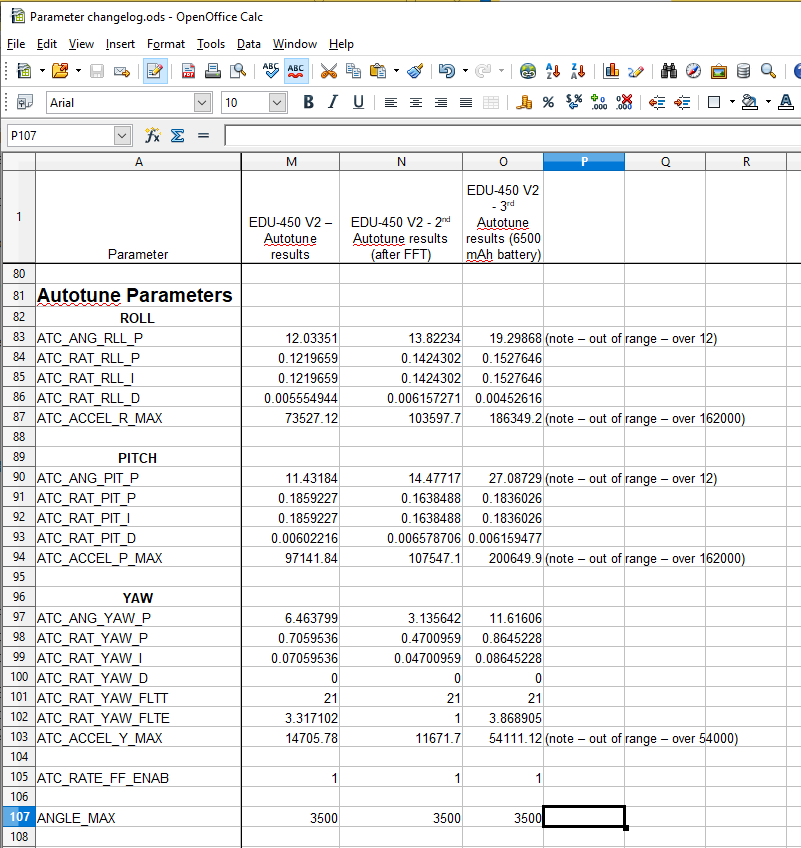
After all that I’d be inclined to run Autotune again, especially if the HNOTCH/FFT works out better.