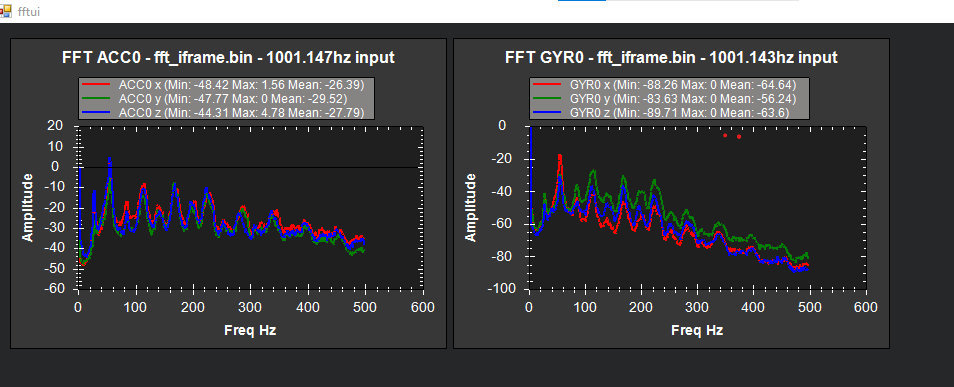
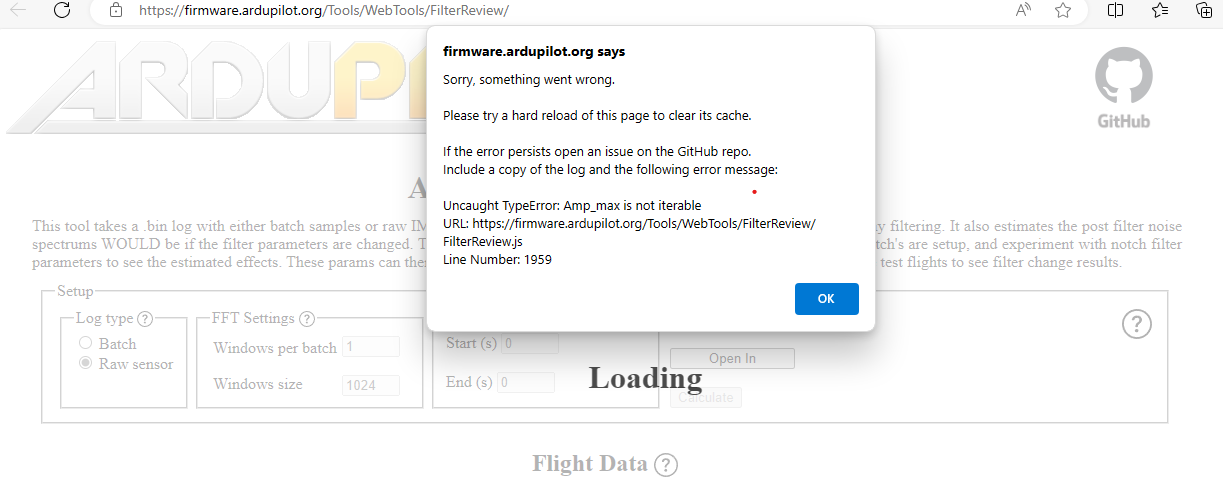
There must be something in your log it doesnt like. You will have to use the MissionPlanner FFT graphs for now, but ensure you have these settings for future flights
I have done that and started auto tuning my drone, the aggressiveness was 0.05. But it crashed.
Then again repaired it and trying to manually tune the craft. @xfacta@dkemxr can you help me with this.
I am attaching a bin file with this link WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
Kindly help. It was almost again going to crash. Suggest something.
hi everyone.
Just saw the above log. Actually i am also having same problem.
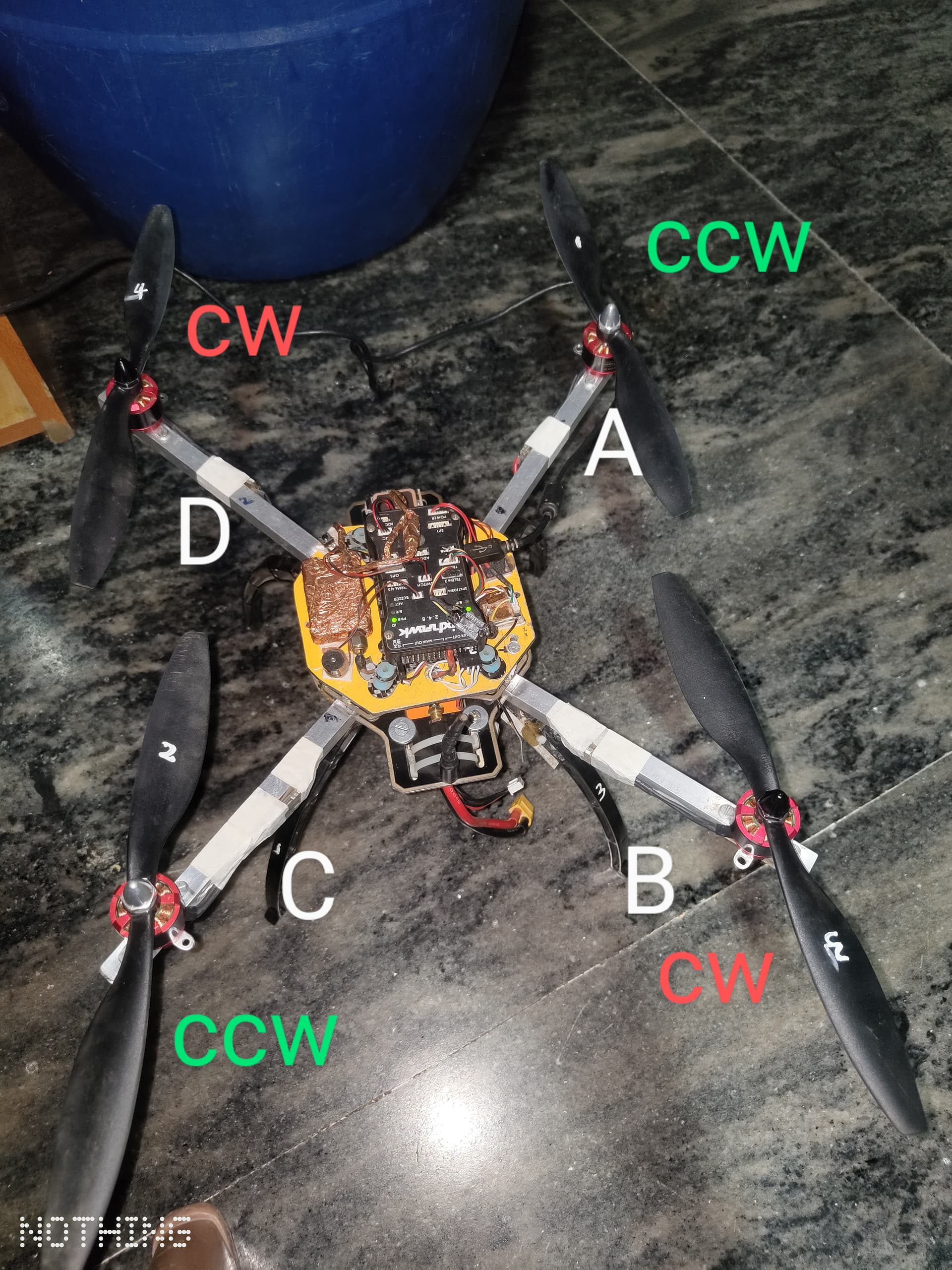
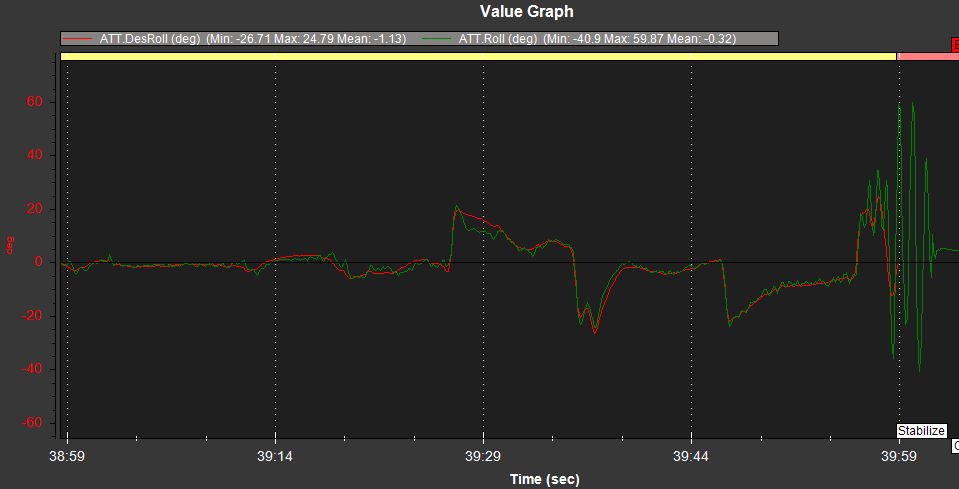
What is happening with me is my propellers are of 30 inch and it flow fine, but not with standing the winds and speed. If possible can you look into it. i am sharing few graphs for your reference.
@xfacta@dkemxr@tridge
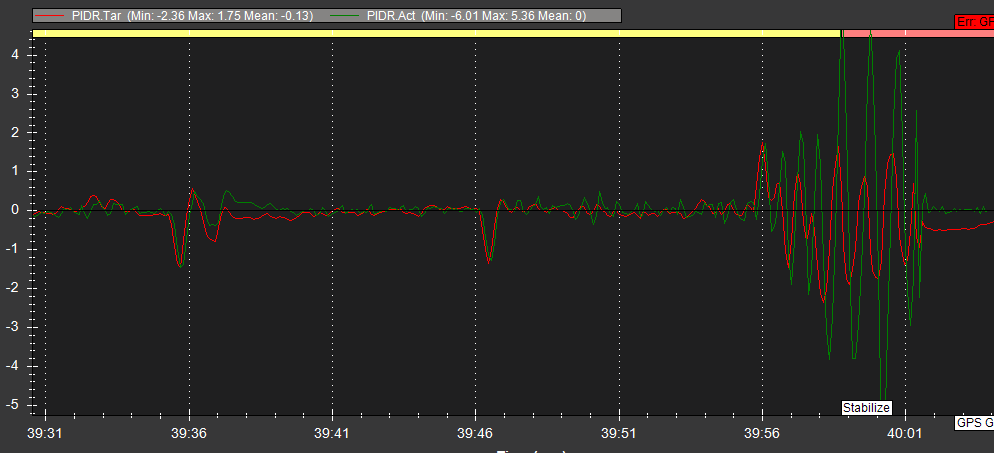
Whenever i tried it in loiter speed of around 7-8m/s the same thing happens and lead to crash.
AmitSingh Have you find your solution.
I have a question about the throttle based Notch filter tuning on a spreader drone. The wiki mentiones settings for the hoverthrust. How would I set this, when the total take of weight is 50kg, but it looses 20kg during the flight?
INS_HNTCH_FM_RAT
helps with this, by allowing the notch to be scaled down below the FREQ you have set.
Normally we’d use 0.7 but you may need 0.5 or something…
A flight log where this weight change happens would be good to see, and we can use the Filter Review tool to check what works at different stages of flight.
If you have a suitable flight controller, it might even be better to use the in-flight FFT option, but dont jump into trying this before exploring the throttle-based notch filter, and getting a good idea of the range of noise.