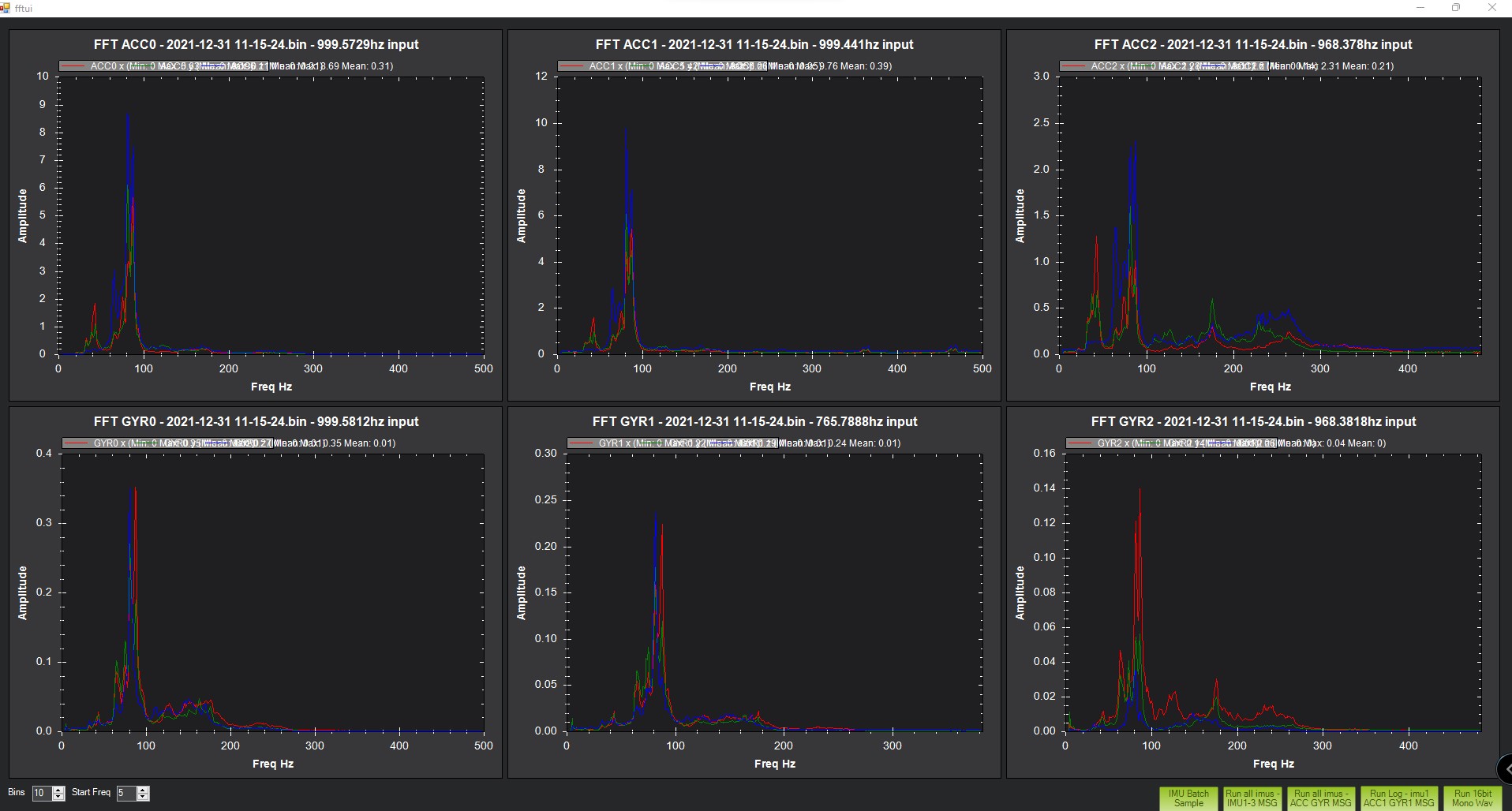
No. 1st you don’t look at the Accel data at all when configuring the Harmonic Notch. Gyro only. So that peak at ~72Hz on the Gyro graph is of primary interest. Start there. You could post your log…
What to do when there are two well separated peaks? One at 192 hz and one at 60 hz?
Notice that normally the second peak is at twice or trice or four times the frequency of the first. Those are called harmonics. You set the filter for the lowest frequency and explain the filter that (in your case) you want to suppress the third multiple frequency as well.
The harmonic notch filter (as the name suggests) will then suppress the main (lower frequency peak) as well as the other peak.
Take a look at the excellent documentation, it`s worth a read.
1 Like
Thank you for your explanation!
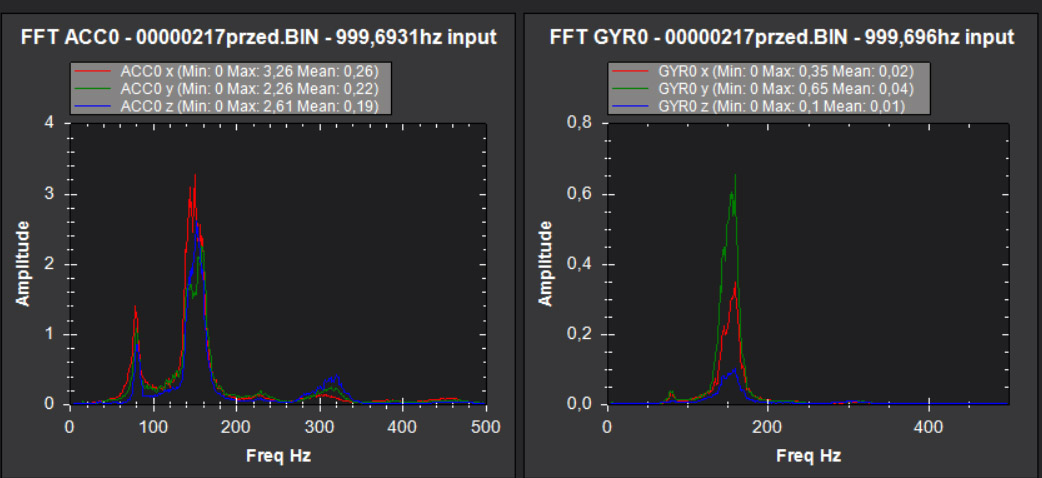
Actually, I had multiple peaks. from my understanding, the increasing harmonics should have less amplitude. But in my case, the harmonics of 192 hz were suppressed correctly within the bandwidth of the filter. However, a peak higher than the harmonic’s amplitude occurred at 60 hz.
here is my data, if you’re willing to take a look:
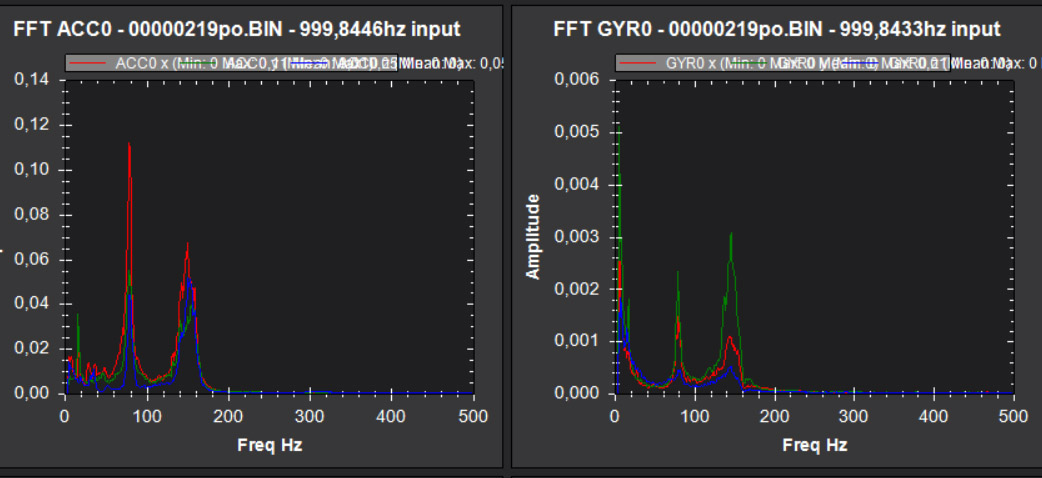
post filter results are in the next post.
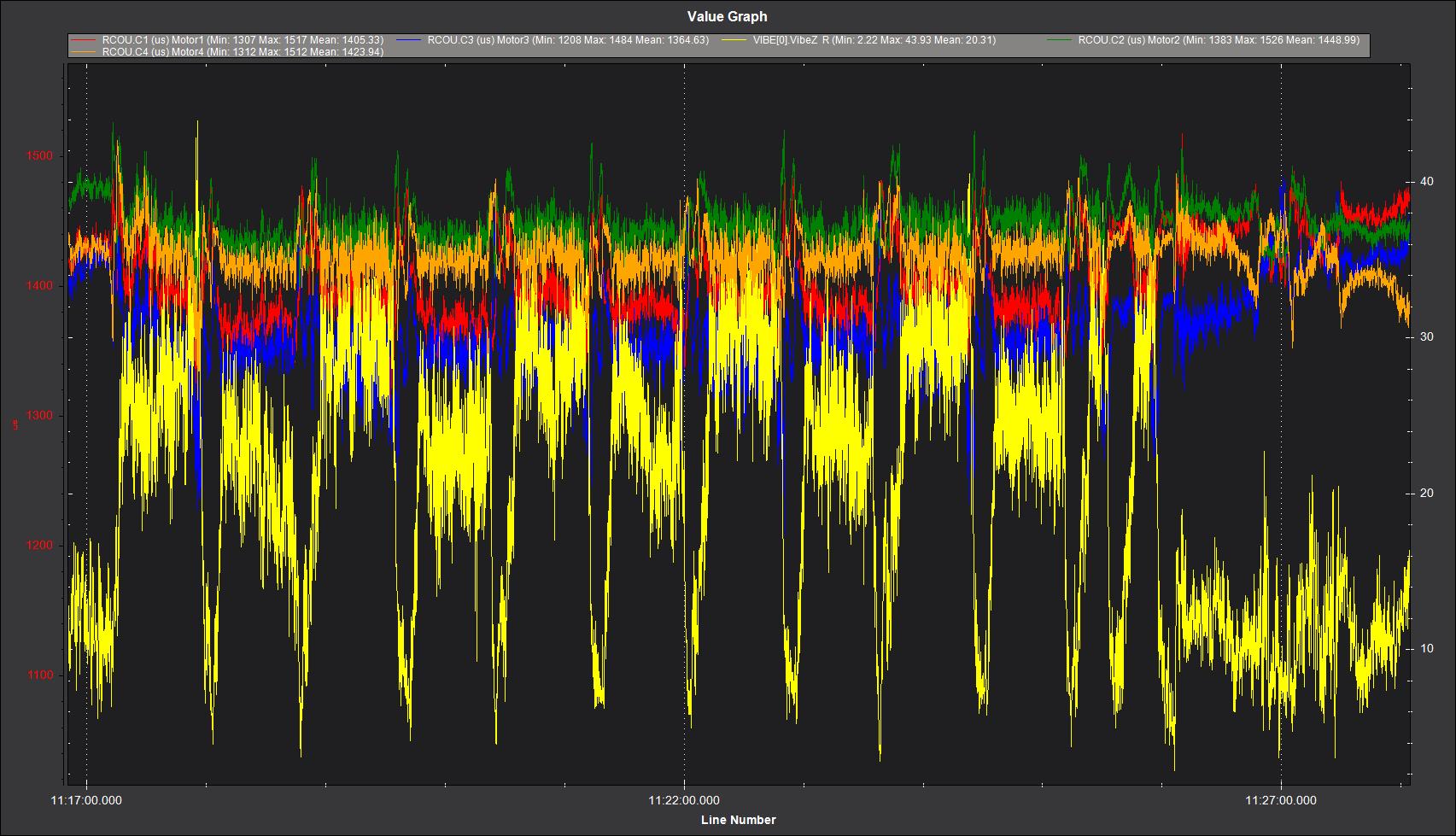
Hi. I think my drone got a little light ( Quad , Total flight weight is 7140 grams, T-motor MN6007II ) so when forward flight ( Mapping mission ) C1 and C3 motors spins a little slower and I get a vibration alert on Z axis . ( I am using foldable props ) . Can i solve this problem using notch filter ?
If I can’t solve this problem with filter , I will either use a non-foldable propeller or use more weight for high rpm .
https://drive.google.com/file/d/1XW2scQsK-MrKT3_zL-MCJshdZrPJy72a/view?usp=sharing

The notch filter will certainly improve things, whether it is enough I have no idea
Any advice for notch filter setup ?
The wiki is your friend
Hi,
I have question about Notch filter.
I’m sorry but after Notch filter function all of value as like INS_HNTCH_ATT automatically will changed?
Thank you for in advance.
No, the only thing the dynamically changes in the INS_HNTCH_* dynamic Notch filter is the frequency.
You need to configure them. Did you read the Wiki?
Thank you. I all of posting read now.
Then understood …
But Could you explain for me where can I find Min_freq for set INS_HNTCH_REF…
To start with you set this at the hover frequency
1 Like
thank you so much ! Now it’s work!
Hi could anyone check did I do everything ok?
I have flat octo 4s batteries 14" propellers 4.1.5 arducopter firmware Cube Black.
I change parameters in Mission Planner:
INS_HNTCH_ENABLE
INS_HNTCH_MODE = 1
INS_LOG_BAT_MASK = 1
LOG_BITMASK (without RAW IMU)
INS_HNTCH_ENABLE=1
INS_LOG_BAT_OPT= 0
I did gentle hover flight for 30 seconds in ALT HOLD log here
and I choose to set:
INS_HNTCH_FREQ=155
INS_HNTCH_REF=0,29
INS_HNTCH_BW=77
INS_LOG_BAT_OPT=2
I did next gentle hover and log is here
Now I am thinking that maybe INS_HNTCH_FREQ should be 81 ??? and BW 40 ???
After setting and checking is that everything is ok during flight after notch… Should I change:
INS_LOG_BAT_MASK = 0
and something else ?
I would target that peak around 80 Hz with
INS_HNTCH_REF,0.27
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
I calculated the REF value using
INS_HNTCH_REF = hover_thrust * SQUAREROOT(min_freq / hover_freq)
1 Like
Hi can someone explain me. I did set the throttle based notch few months ago and now If my octocopter is flying with different loads and:
“MOT_THST_HOVER” is changing depends on the weight of the flying copter. Should I change
“INS_HNTCH_REF” to match this new value ?
So If the: “MOT_THST_HOVER” is now is 0.29 and “INS_HNTCH_REF” is 0.27 should I change the “INS_HNTCH_REF” to 0.29 ?
Maybe, but by changing the weight you will have also changed the tune and the rpm at hover so really you should do the whole setup again - this is the problem with the throttle based notch. Same applies winter vs summer - different air density gives different results.
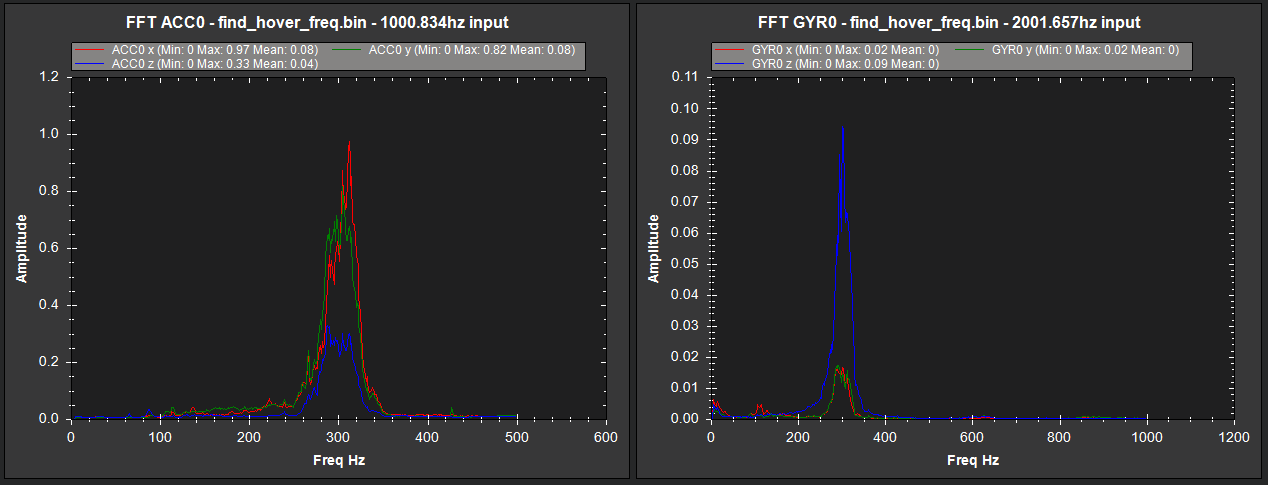
Hi I am tuning my 3" kakute h7 small quad.
with INS_LOG_BAT_OPT=0 and INS_HNTCH_ENABLE=0
https://drive.google.com/file/d/1-8MSIA4vMldYQZWF_1Mxx6IzTTjoZLCY/view?usp=sharing
with INS_LOG_BAT_OPT=2 and INS_HNTCH_ENABLE=1, INS_NHTCH_FREQ=250
https://drive.google.com/file/d/1-EiZor5KuYpTSDF_Gbssx_FEVyvQ4G3s/view?usp=sharing
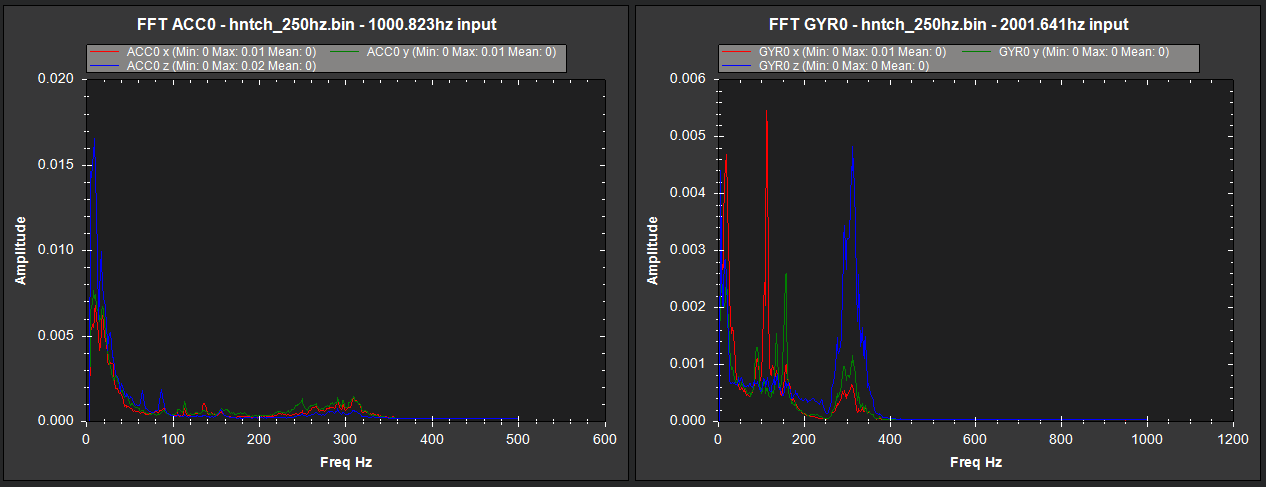
I found accelerometer noise is greatly reduced, but gyro noise remains. It seems a little strange. Any suggestions would be greatly appreciated.
you went from 100 to 5. That is a 20x reduction. But I guess the freq is not exactly 250Hz, the peak is at 316Hz
1 Like