I was able to capture the Batch sample for the harmonic notch filter setup.
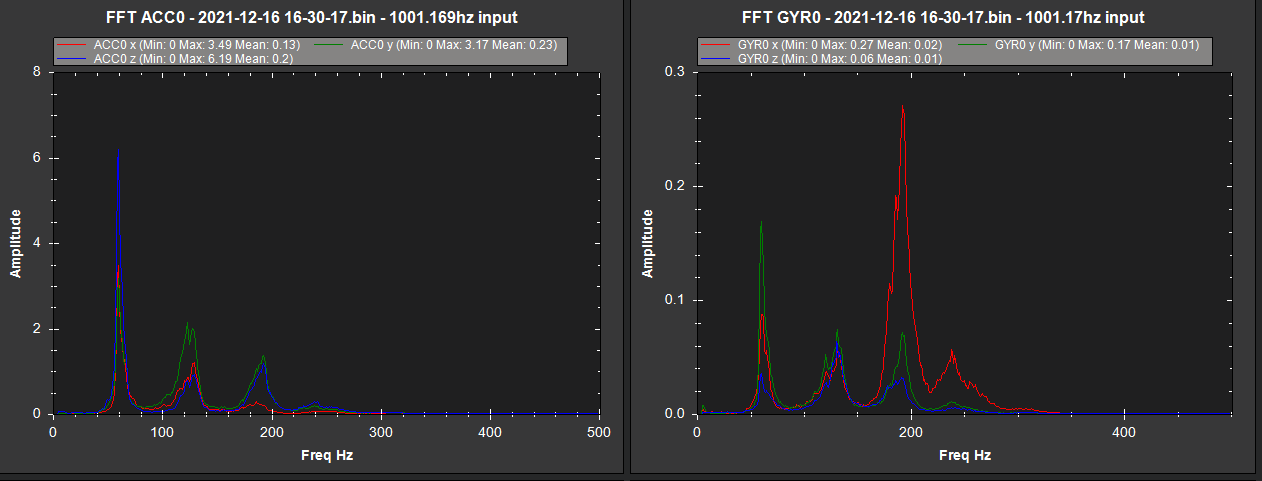
This are the FFT results from the Mission Planner.
The documentation states:
“On the graph it should be possible to identify a significant peak in noise that corresponds to the motor rotational frequency. On a smaller Copter this is likely to be around 200Hz and on a larger Copter/Quadplane 100Hz or so. Here is an example from a 5” quad:” Managing Gyro Noise with the Static Notch and Dynamic Harmonic Notch Filters — Plane documentation
The example graph shown in the documentation has an amplitude peak of around 80 to 100.
However, my pre-notch FFT returns peak amplitudes of 8 to 10. clear peaks are there but at different places in Acc and Gyr
bin log is attached for any comments.