Yes.
More words here
1 Like
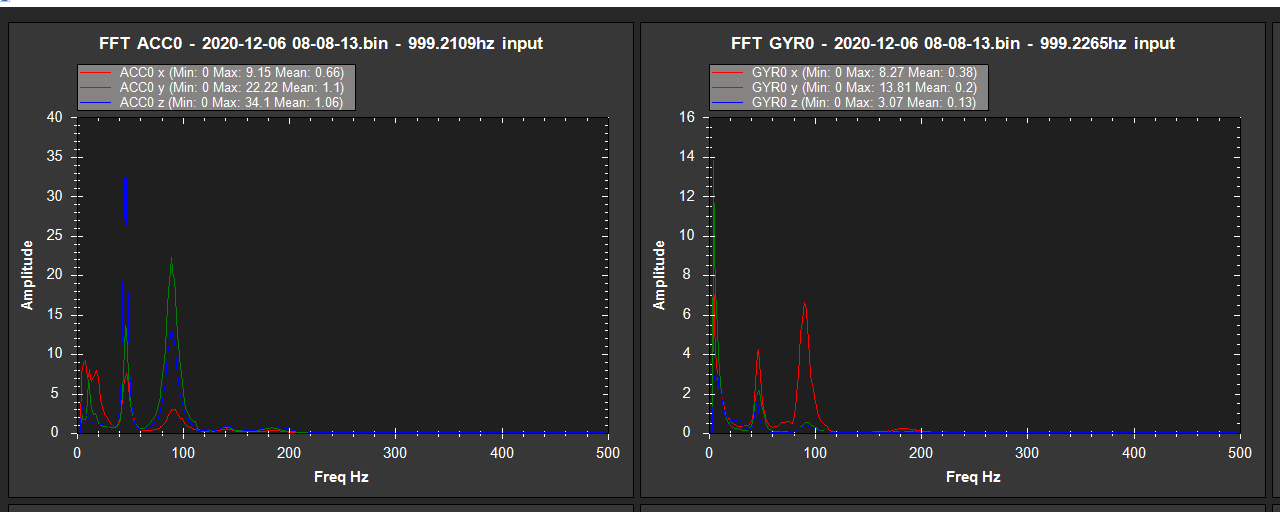
Good afternoon! Changed freq and ref as you recommended.
The graph now looks like this.
Is there anything else you need to do here, or can you go to auto-tuning now?
Flight log
https://drive.google.com/drive/folders/1q1RejKRc0utmjZHXUyWbqv98Bse-Rk5C?usp=sharing
Yeah looks better - I think you are good to go to autotune
1 Like
Thank you for your help 
Hello @xfacta @andyp1per ,
I have a custom Quad with weight 10.2kg, T-motor MN701-S, 24" prop, Cube Orange 4.0.4 and planning to lift a 6kg payload.
Conducted autotune and looking to improve the Quad performance with harmonic notch filter.
I’m not sure if I’m doing everything right or left anything out. Please take a look at my graph and filter settings. Thank you.
How do I ensure that I don’t accidentally filter out my FC’s control inputs?
INS_HNTCH_ENABLE|1|
INS_HNTCH_FREQ|42|
INS_HNTCH_BW|21|
INS_HNTCH_ATT|40|
INS_HNTCH_HMNCS|7|
INS_HNTCH_REF|0.31588|
INS_HNTCH_MODE|1|
Flight log
https://drive.google.com/drive/folders/1toOdbQv7jnxNhTe_eQc0lMRBhnAu2d2q?usp=sharing
Before

After

Your configuration looks completely correct - I’m just surprised it hasn’t done a little better. Maybe try HMNCS = 3 just to make sure you are not overloading the FC with the number of notches (seems extremely unlikely to me). Also try FREQ = 41
Your notch is narrow - I think you will be fine, but you can always make it narrower if you are concerned.
Alright, great. Will try INS_HNTCH_FREQ = 41 and reduce the INS_HNTCH_BW. Maybe I will try to increase INS_HNTCH_ATT = 50 as well. Will try to fly with these settings in a few days. Thank you for the reply. 
Hey good morning @andyp1per hope your well.
I put one of my quads back into the sky today after having to introduce some mods. Longer landing legs, changed the gimbal position that sort of thing.
I assume I need to tune the notch again.
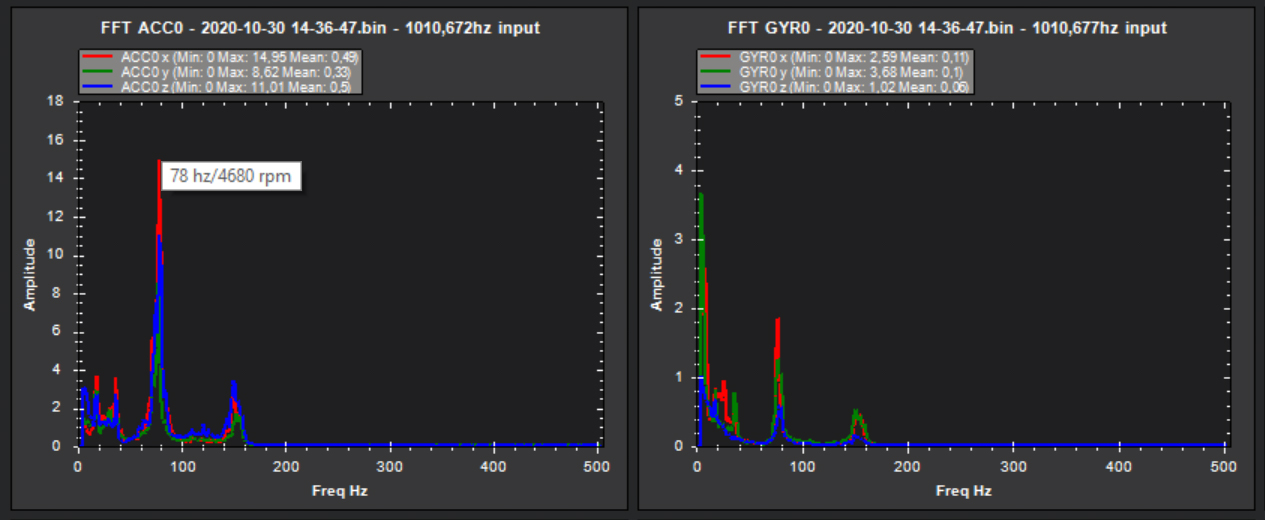
This is what the DF log shows today.
I am guessing I need to change the INS_HNTCH_FREQ,65 to 80
INS_HNTCH_HMNCS,7 set to 3 instead of 7.
INS_HNTCH_BW,35 set to 40 not 35
Hope I am getting this finally.
While waiting for Dr. Piper my $.02
The notch filter is active on the gyro’s not accels and you are showing an Accel graph.
It looks like post filter data.
If you want to revise the filter set the log option for pre-filter and look at the gyro graph.
Your right Dave I mixed them up.
My gyro noise was good.
I guess I don’t need to worry about it. hahaha…thanks man
That does look good. But to be sure after the hardware changes it still might be reviewing pre-filter data. Or, just fly it and have fun 
1 Like
Yes FREQ -> 80
Looks good otherwise
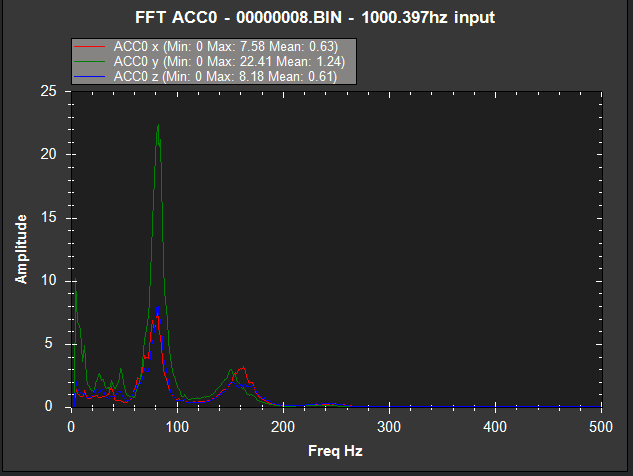
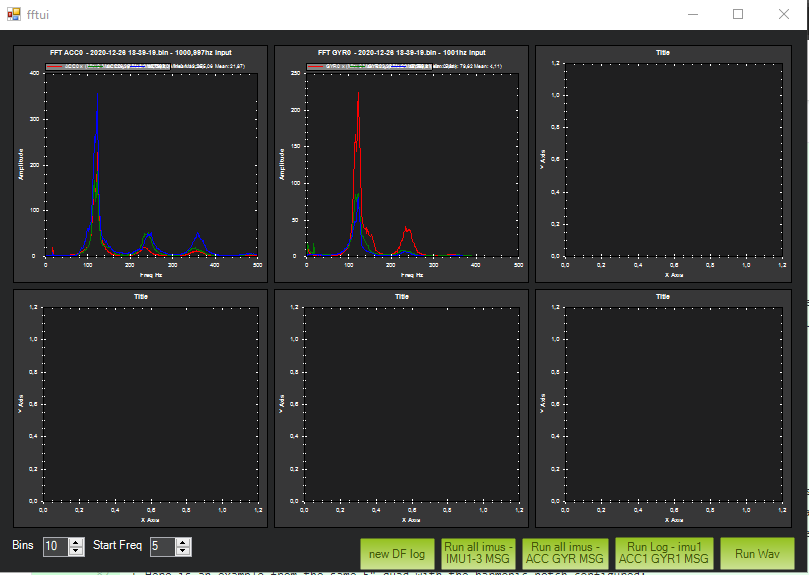
Got my largest drone out today. Very calm was looking to get some tuning done and was successful.
But then I thought I also need to tune the filter.
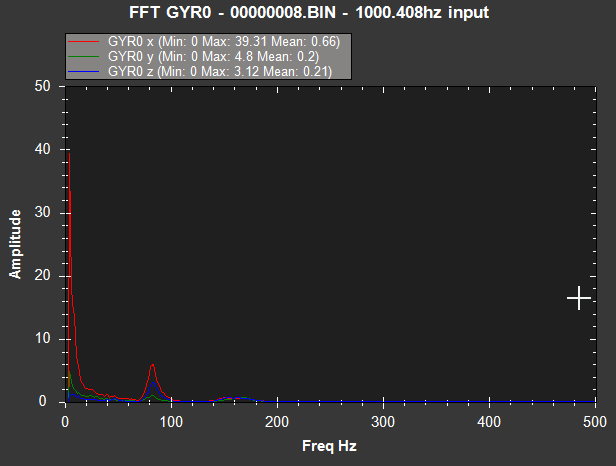
This is what the log shows me.
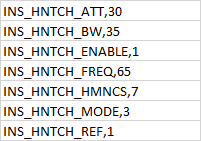
These are my parameters. I assume this is correct.
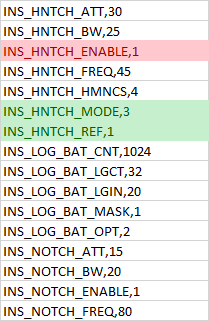
Is this a Post filter graph? If so ignore what I wrote below and post a flight of pre-filter. OK it is, I see the Log Options parameter. Need Pre-filter data to set the notch.
Assuming that 1st peak on the gyro graph is at 45Hz and you are using ESC Telemetry reference I would set:
INS_HNTCH_ATT,40
INS_HNTCH_BW,22
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,45
INS_HNTCH_HMNCS,3 (you have this at 4 which is only the 3rd harmonic)
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,1
INS_HNTCH_REF,1
And disable the Static Notch.
Hey Dave.
Thanks for your input. Will make the changes.
I assume this is what controls if the static notch is on or not.
![]()
Good morning! Yes that would disable it. But to review the notch setting you should really look at pre-filter data as post filter data is influenced by the filter setting now. But I would say you probably don’t want overlap with the Dynamic filter and the static filter and the harmonic setting of 4 maybe was a typo or something. But perhaps there was some logic there and I don’t know. Hard to say again with pre-filter data.
I will make the changes and get the pre filter data. Right now the bird is grounded. It’s getting cold and I have a couple mods I want to do to improve it’s redundancy.
I have had a couple connection failures as well as a brown out on the gimbal and I want to get them resolved. Plus i need a warmer day. Man it was cold out there today.
Ok I have updated my param file that I use to upload changes to the machine.
Hopefully I can get it out again and try the new params.
I just assembled a 4" with some parts from the bin and a re-purposed Kakute F7 Mini (now rare V2) and I can’t believe how well this performs compared to the struggles I had with a 3" and the Omni F4 Nano. For the Maiden flight, after setting the basic tuning parameters and the Dynamic notch filter, it has to be one of best initial flyers I have built and it’s on Default PID’s! By every measurable metric it’s performing well. A bit sluggish for sure but it’s on Defaults so a long way to go there.
For those interested the log is here. It’s on 3S. I flew it on 4S also but it’s a handful and not needed. Posting in this thread because of the amazing work done by Dr. Piper @andyp1per !!
2 Likes
Hello everyone. I want to try out setting my notch filter but I need some guidance as to exactly what to do. My quadcopter is a 470 size frame with 9 inch props and 900 kv motors.
So based off of these screen shots, am a right in assuming that i need to apply the following values
MOT_THST_HOVER = 0,4540588
INS_HNTCH_FREQ = 135Hz
INS_HNTCH_BW/2 = 67.5