I also wondered about matching TRATE and INS_GYRO_FILTER.
Regarding temps, we had hot motors before I knew I could up the TRATE.
I also wondered about matching TRATE and INS_GYRO_FILTER.
Regarding temps, we had hot motors before I knew I could up the TRATE.
Hey @andyp1per
I never upped my Trate on any of my machines. Honestly had no idea it existed. Also was not going to up it more then 20 percent anyway. My INS_GYRO_FILTER is set to 26 and right now the Trate is 10.
But hey if you think there is no value. I can leave it right now. I have other issues to resolve.
Damn tried motor balancing today. Everything i tried made the motor worse not better. These motors are balanced. sigh
Hi,
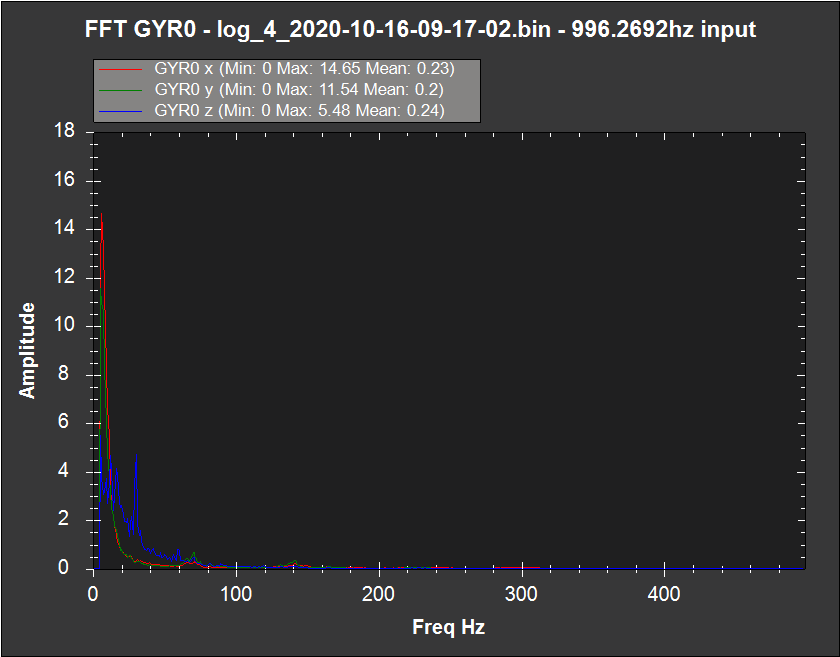
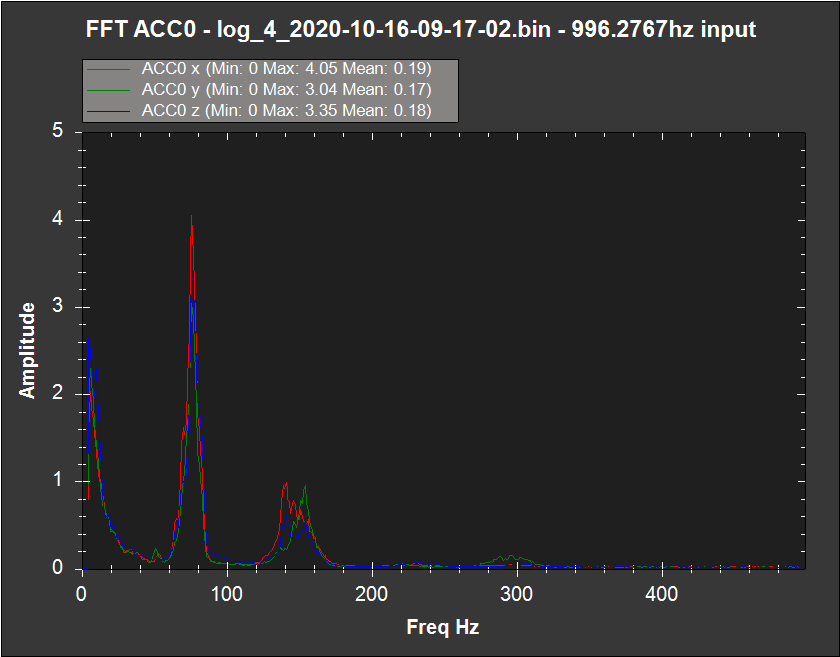
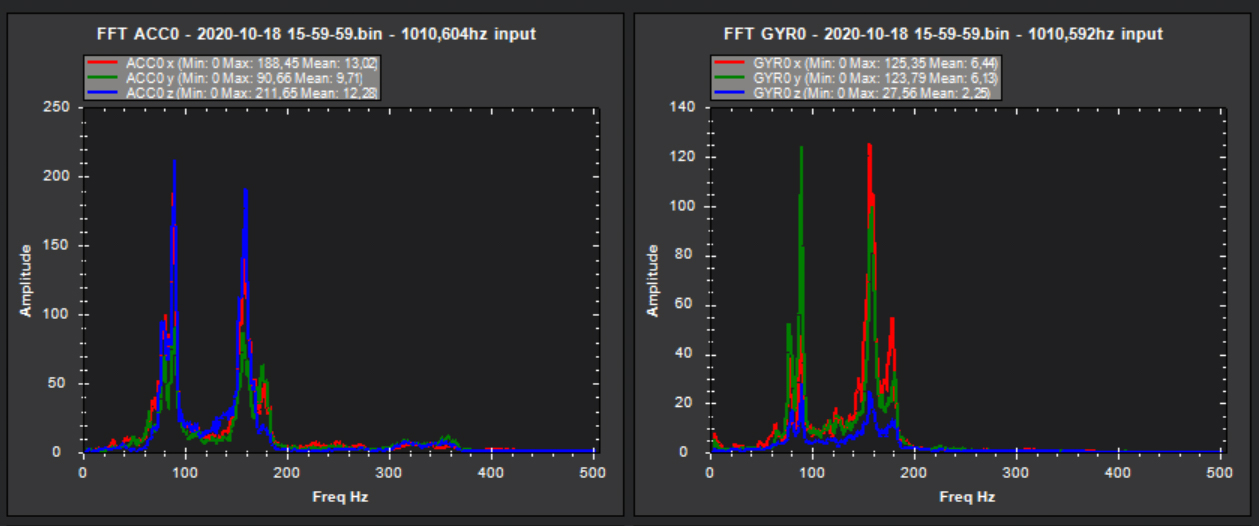
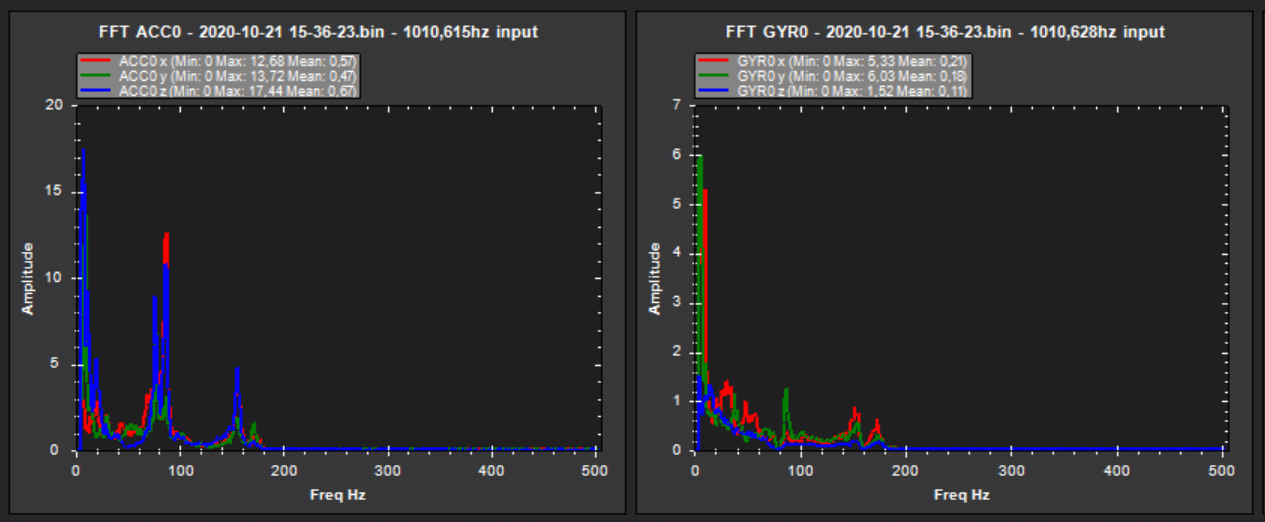
Have tried to activate the notch filter on my 10" prop quad, attached is before and after. Should I consider this good enough or are there tweaks that I should consider?
My parameters are:
INS_HNTCH_ATT 15.00
INS_HNTCH_BW 39.00
INS_HNTCH_FREQ 78.00
INS_HNTCH_HMNCS 3
INS_HNTCH_MODE 1
INS_HNTCH_OPTS 1
INS_HNTCH_REF 0.318
FC - Matek 405 CTR with Arducopter 4.1 dev
Looks good. I’m intrigued by the spike at 30Hz on the Z axis, I have no idea what would be causing that.
Thank you very much for the feedback, so next step will be to run another autotune as I understand?
Could this filter potentially reduce the risk of EKF issues, GPS glitches, Compass variance, error that Ive been fighting?
My biggest issue has been that my heading has been drifting away from the real value after some time in the air flying in Loiter mode.
Yes autotune is the next step
This may help with the EKF, but the EKF is more reliant on Accel and this will not affect accel vibes much - so you may still need to mount your FC better
Ok, thanks.
I will continue testing 
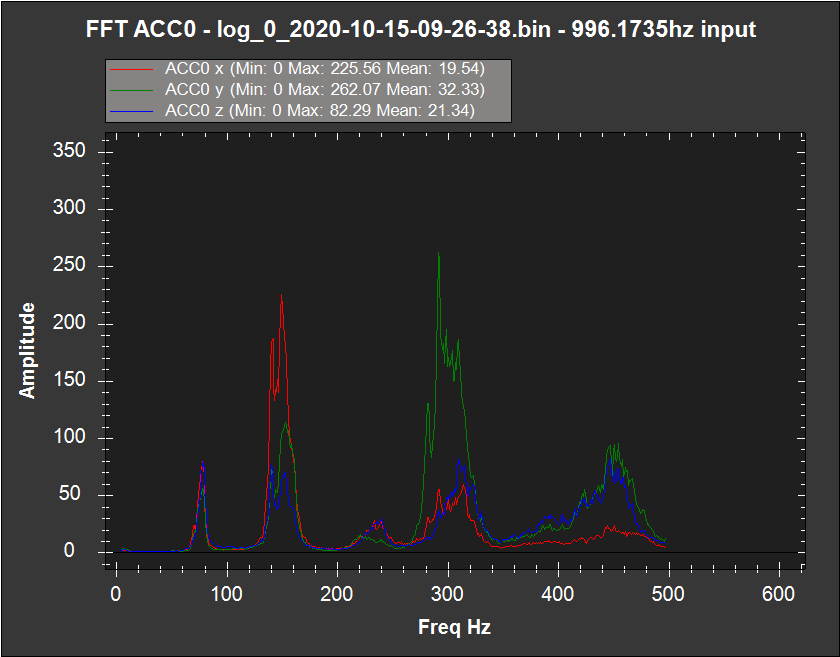
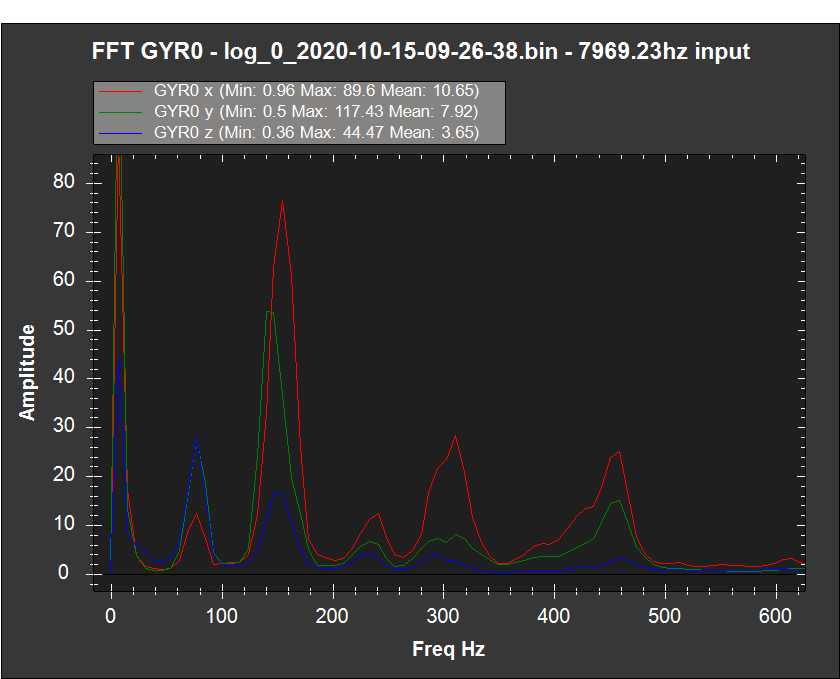
Have I understood it correctly that the FFT indicate that it is probably a bigger issue with the frame resonance than motor and prop vibration?
If the motors and props would be the big problem shouldn’t that give a wider spectrum and the high Y vibration most likely comes from air pulsating on the frame from the side?
Hello @andyp1per
Please take a look at my graphs and filter settings.
I do not quite understand whether I am doing everything right or not.
Thanks in advance for your help.
I have a Tarot X8 15 "prop, weight 11.5 kg. Pixhawk cube orange 4.0.3
Throttle based settings;
INS_HNTCH_REF 0.46
INS_HNTCH_FREQ 80 Hz
INS_HNTCH_BW 35 Hz
INS_HNTCH_ATT 40 db
INS_HNTCH_HMNCS 7
INS_NOTCH_ENABLE 1
INS_NOTCH_FREQ 80 Hz
INS_NOTCH_BW 30 Hz
INS_NOTCH_ATT 40 db
Before
I think you could change INS_HNTCH_BW to 40
and INS_NOTCH_ENABLE to 0 and avoid the static notch
There’s other things to fix too:
Set these right away:
BATT_FS_CRT_ACT,1
INS_GYRO_FILTER,20
MOT_THST_EXPO,0.71
I suggest you set these:
BATT_ARM_VOLT,22.1
BATT_CRT_VOLT,21
BATT_LOW_VOLT,21.6
PSC_ACCZ_I,0.978
PSC_ACCZ_P,0.489
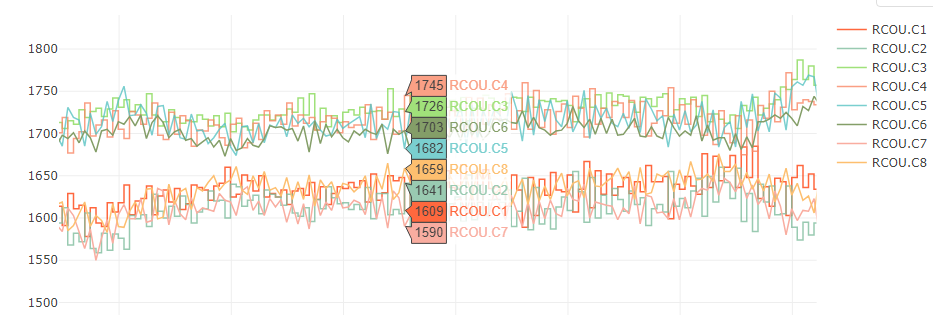
You’ve got a distinct physical yaw bias. CCW motors are working harder to counteract a CW bias. Usually it’s twisted motor mounts.
Also it looks like motor/ESC PWM is getting a bit high just for hovering. You’ll either need to reduce take-off weight, or find some more thrust. The risk will be loss of stability in wind or quick manoeuvres, or loss of altitude during said events in order to maintain stability. But lets see what PWM looks like after you fix the yaw issue.
EDIT: I did a few edits to fix my own mistakes, and to reorder a bit, moved MOT_THST_EXPO up into the “Set right now” section
Thank you for such detailed instructions
I tried INS_NOTCH_ENABLE on 0 the graph peaks were much larger. As I understand it, the graphs should be, the less the better? What, then, is this static label needed?
In calm weather, it flies and controls wonderfully; in the wind it twitches and sways, regardless of weight.
I will reduce the weight and change these parameters that you recommended to me and tomorrow I will make another flight.
Thank you very much 
Usually it’s twisted motor mounts. What do you have in mind? I have foldable propellers. Maybe because of this it happens.
With round arms the motormounts are twisted slightly on the arms - line up all the props outstretched (like in flight) so their tips are pointing at each other and look very carefully. You should be able to find one or more that are not lined up with the rest. There will be a prop with tips that are pointing above/below the plane of the rest.
You need to straighten that motor mount.
We can’t really see what the dynamic notch is doing when you have the static notch enabled. @xfacta s suggestion is correct on the frequency also.
Hey. The tarot x 8 has oval aluminum arms. The engines are fine. But I found that the retaining ring on the engine had come off. Maybe because of this, there was such a problem with the PWM. Today I was unable to fly and check, the weather is not flying.
I’m not sure about those newer/bigger Tarot frames, but in some aircraft arm-twist or frame-twist is a thing too.
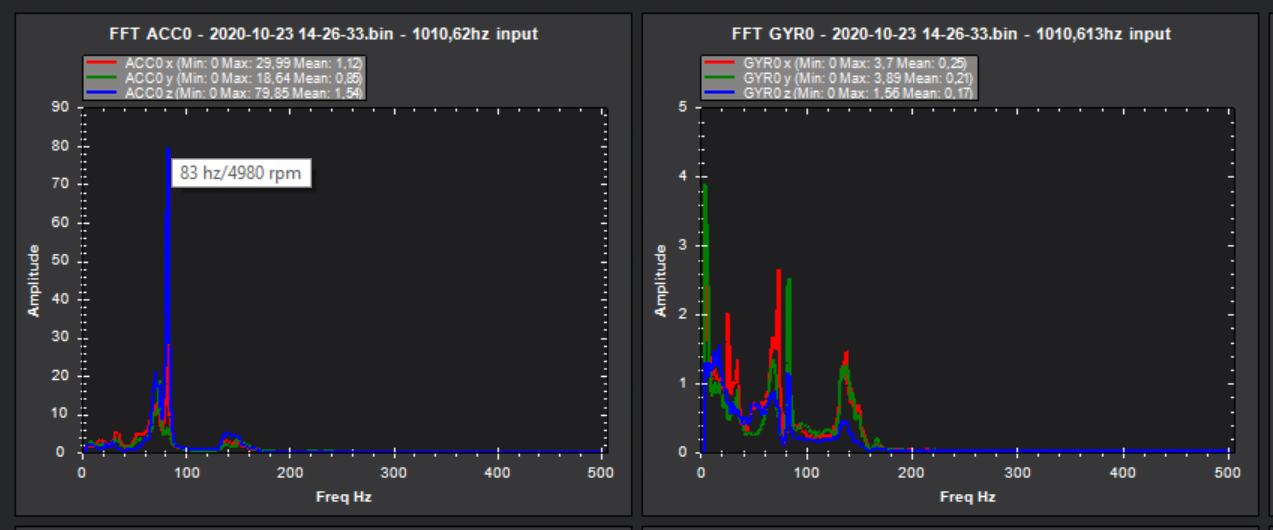
Hello. I made a test flight. I changed the settings according to your recommendations. Now the graph looks like this:
What can you say about this schedule? Is this good or bad.
Throttle based settings;
INS_HNTCH_REF 0.37
INS_HNTCH_FREQ 80 Hz
INS_HNTCH_BW 40 Hz
INS_HNTCH_ATT 40 dB
INS_HNTCH_HMNCS 7
Before
I completely agree with you.
From this frame, I’m the same not happy. She has her weak points.
That looks ok - you will probably get an improvement if you modify ref and freq to go below your hover freq - take a look at the wiki for details.
Thank you very much for your help.
Do you mean this?
INS_HNTCH_REF = hover_thrust * SQUAREROOT (min_freq / hover_freq)
INS_HNTCH_REF = 0.37 * SQUAREROOT (60/80) = 0.32
INS_HNTCH_FREQ 60 Hz
Right? So it should be.