INS_HNTCH_REF = 0,4540588
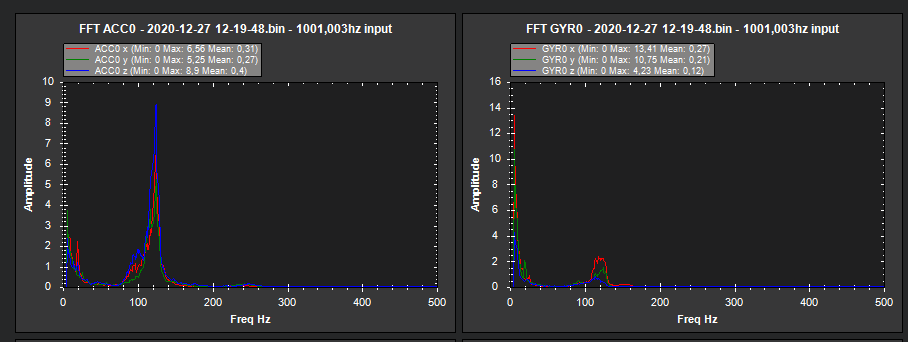
Also sometimes its easier to look at the second peak and divide by two - so I reckon yours is closer to 120Hz than 135Hz
INS_HNTCH_REF = 0,4540588
Also sometimes its easier to look at the second peak and divide by two - so I reckon yours is closer to 120Hz than 135Hz
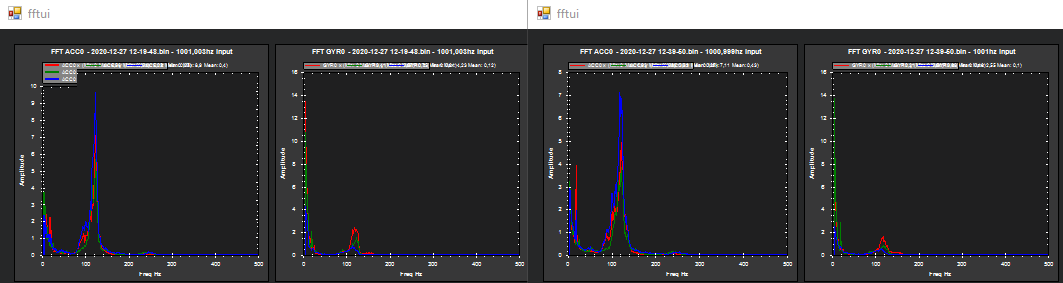
OK so the logs on the left is the first post flight with 135Hz and the one on the right is the second post flight with 125Hz
What are your thoughts?
125Hz looks better, use that
Any suggestions why the AACO is still around 100mhz
The notch filter is not active on the accelerometers only gyro’s.
Is that a setting that i need to change?
No - the accels can’t be filtered
Thank you Andy appreciate your help
Hello everyone.
i need your results analysis.
Frame : 30inch prop , QUADCOPTER
INS_GYRO_FILTER : 25
MOT_THST_EXPO : 0.8
MOT_SPIN_MIN : 0.25
INS_HNTCH_MODE 1
INS_HNTCH_ATT 40
INS_HNTCH_HMNCS 3
INS_HNTCH_REF 0.12
INS_HNTCH_FREQ 58.5
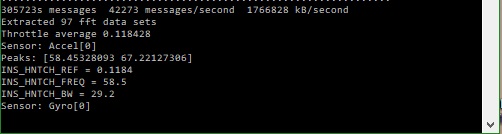
Pymavlink output:
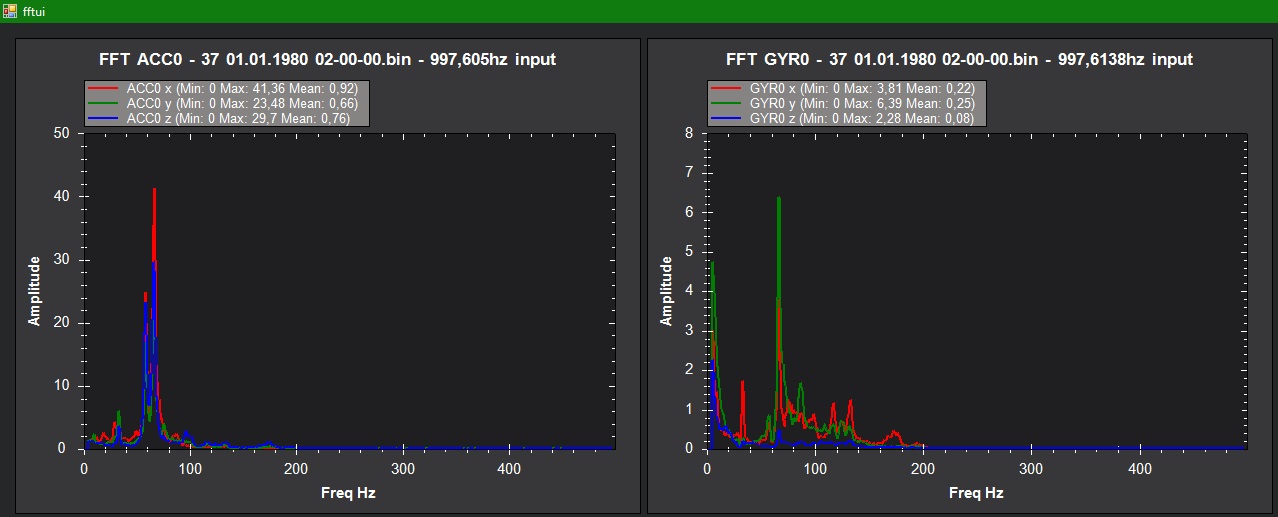
PRE-FILTER log:
https://drive.google.com/file/d/1YwXWGBXJntFmohxeY6_kMPqJQIfaBlw9/view?usp=sharing
POST-FILTER :
I could not decide which result was better. Thrust is 0.12 but I still got results by changing this value.
Also changed BW.
INS_HNTCH_BW 39
INS_HNTCH_REF 0.12
INS_HNTCH_FREQ 58.5
https://drive.google.com/file/d/1lWmO7_jOVsRhgvKuLyZakhBmZAkzx0vi/view?usp=sharing
INS_HNTCH_BW 39
INS_HNTCH_REF 0.20
INS_HNTCH_FREQ 58.5
INS_HNTCH_BW 29.2
INS_HNTCH_REF 0.12
INS_HNTCH_FREQ 58.5
INS_HNTCH_BW 29.2
INS_HNTCH_REF 0.2
INS_HNTCH_FREQ 58.5
Do i need a static notch ?
thank you for your kind help…
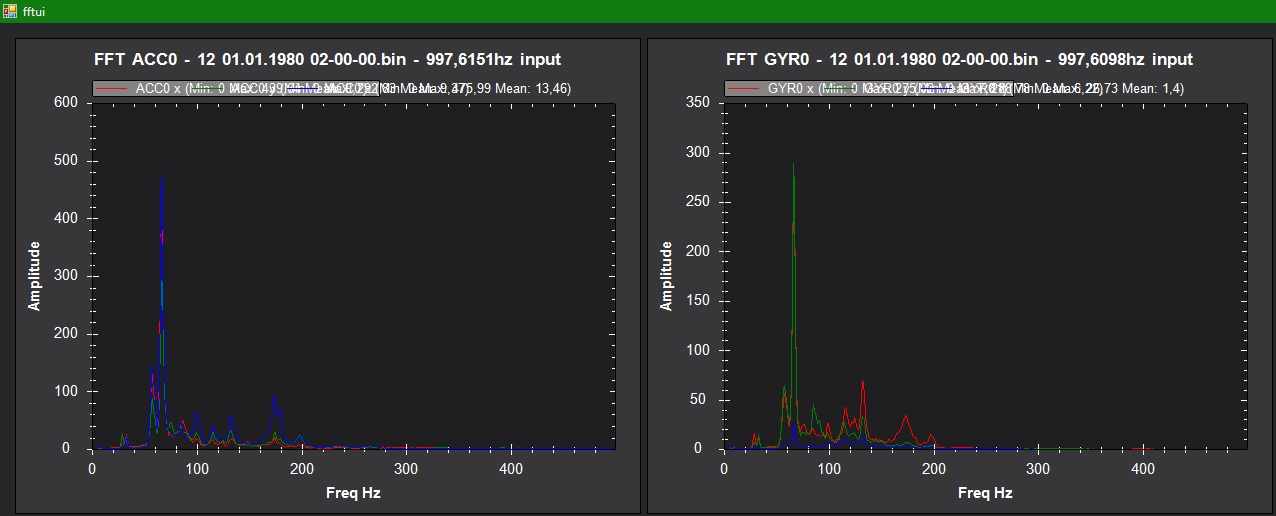
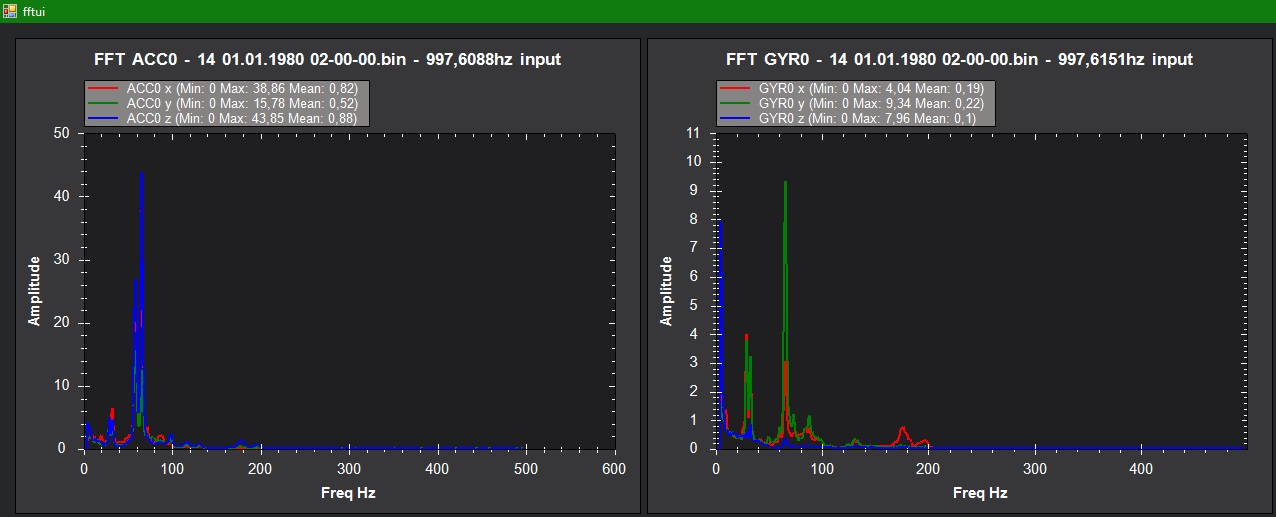
Changing BW won’t make a big difference, its the freq and notch you need to get right. On this copter it seems your primary harmonic is more like 30Hz and that you are hitting the secondary by using 58.5Hz so I would go for something like FREQ=30,BW=15 and try again. Also a ref of 0.12 is very low, to start it should be roughly your hover throttle - is that really what you have?
Thank you @andyp1per
using 30 inch probs and 12s batteries so it is very powerful quadcopter. hover thrust is very low without payload. if i add payload, thrust increase to 0,3 .
When batteries are full, MOT_THST_HOVER is starting with 0.12. But when the battery begins to drain (%50 full), MOT_THST_HOVER is set to 0.18 without payload.
I do not know which value I can set the Hnotch post filter REF value.
New flight with new settings:
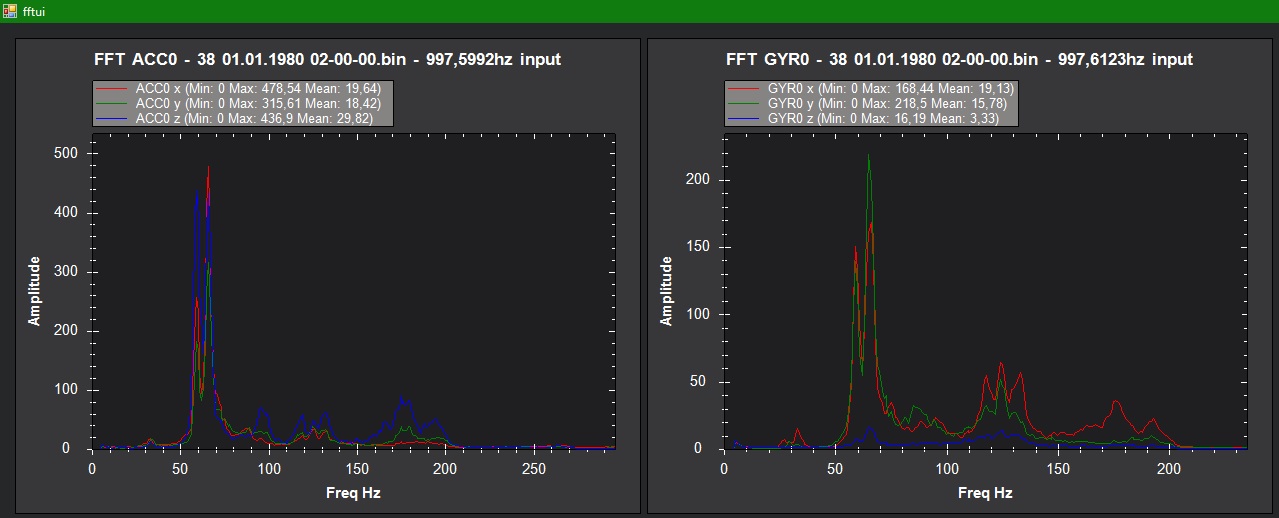
POST-FILTER_1:
INS_HNTCH_REF 0.18 Batteries was %50 full.
INS_HNTCH_FREQ 30
INS_HNTCH_BW 15
POST-FILTER_2
INS_HNTCH_REF 0.12 Batteries was full.
INS_HNTCH_FREQ 30
INS_HNTCH_BW 15
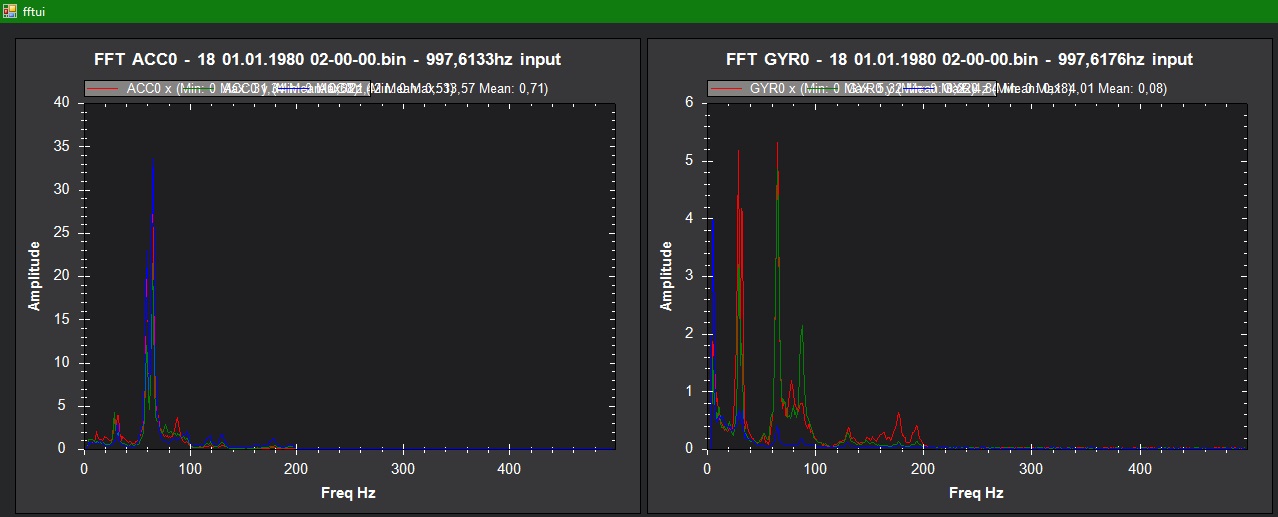
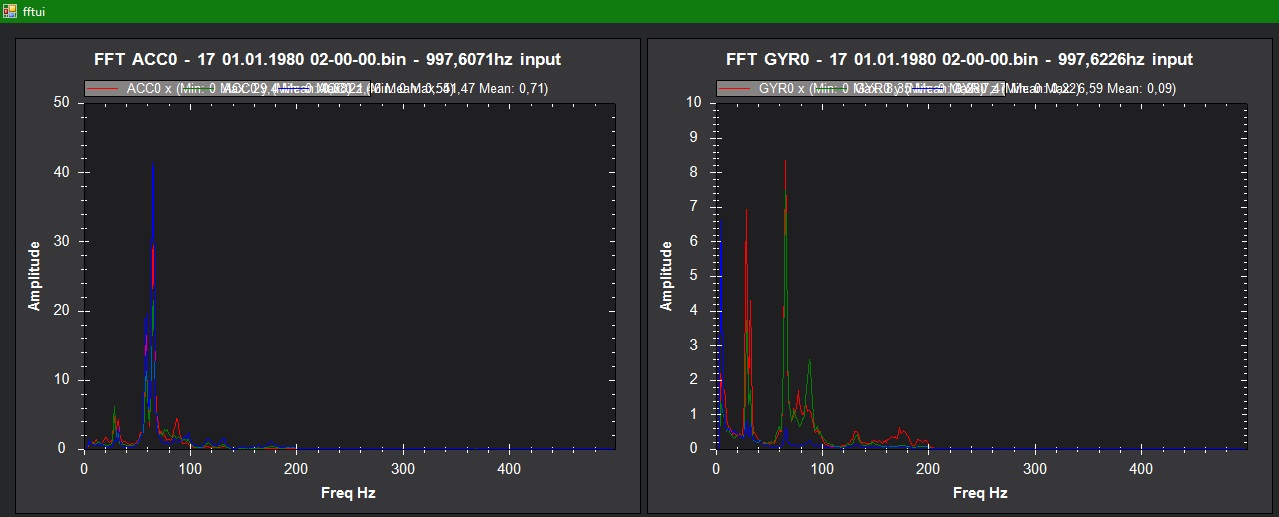
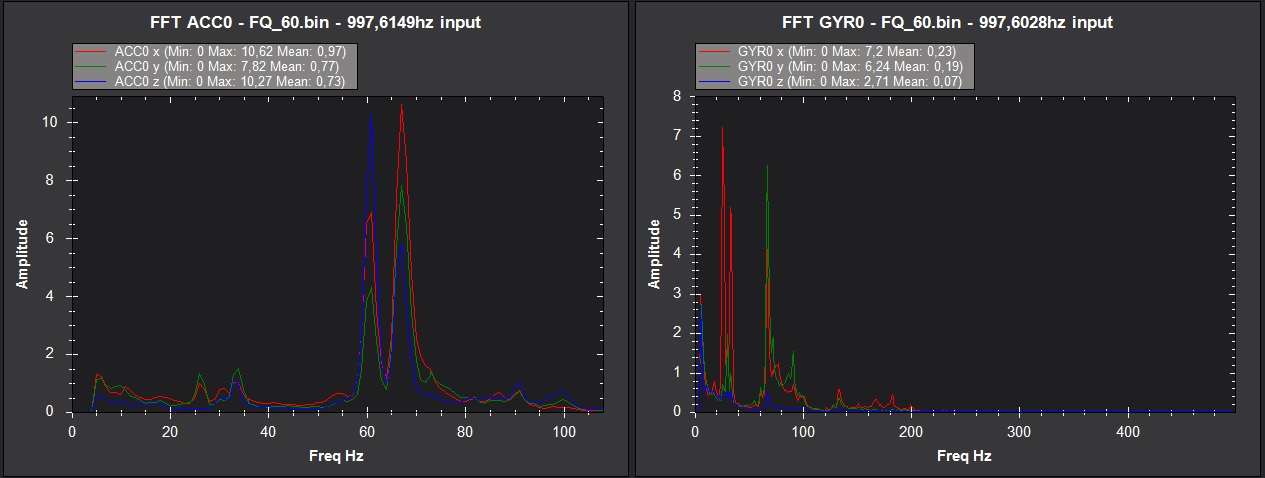
You can see from the sharp dip at 60Hz before the largest peak that 30Hz is not quite right. Maybe try 35?
I just got a new flight for PRE-FILTER. because i did autotuning since the previous pre-filter test.
do i try new setting that you said 35 freq ?
PRE-FILTER:
INS_LOG_BAT_MASK 1
INS_LOG_BAT_OPT 0
https://drive.google.com/file/d/1qmhqmyft6A_YBKidvIl0KbTdKGCvHnL5/view?usp=sharing
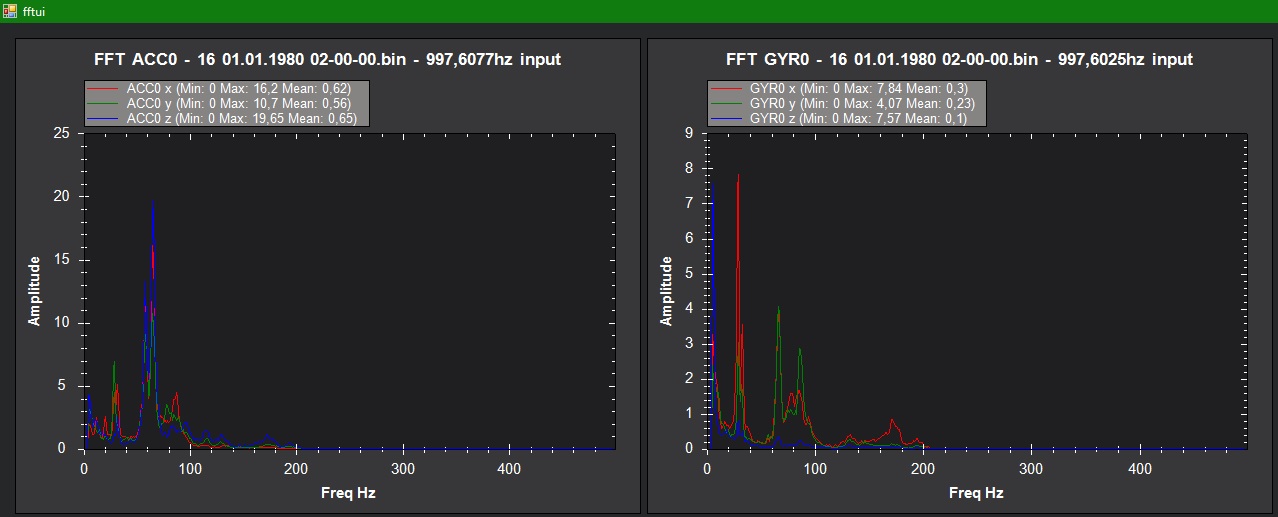
Its not far off, maybe 32Hz. How many motors do you have?
frame has 4 motors.
new test, can you look at
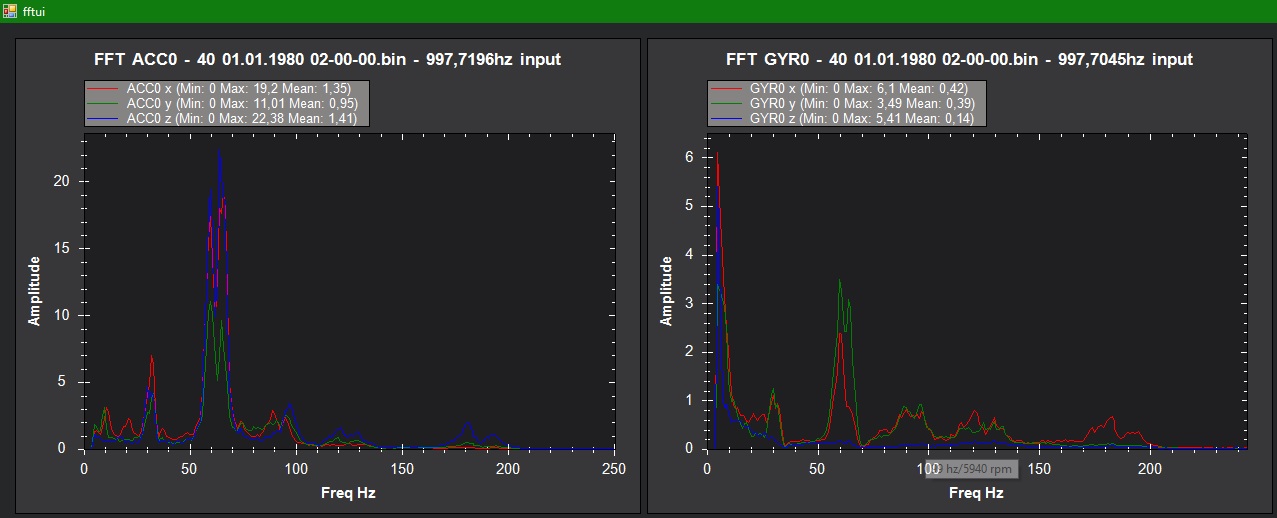
POST-FILTER:
INS_HNTCH_REF 0.125
INS_HNTCH_FREQ 35
INS_HNTCH_BW 17,5
https://drive.google.com/file/d/1njj1re-t_W6b2_VqA9OV0FOaealT-RaY/view?usp=sharing
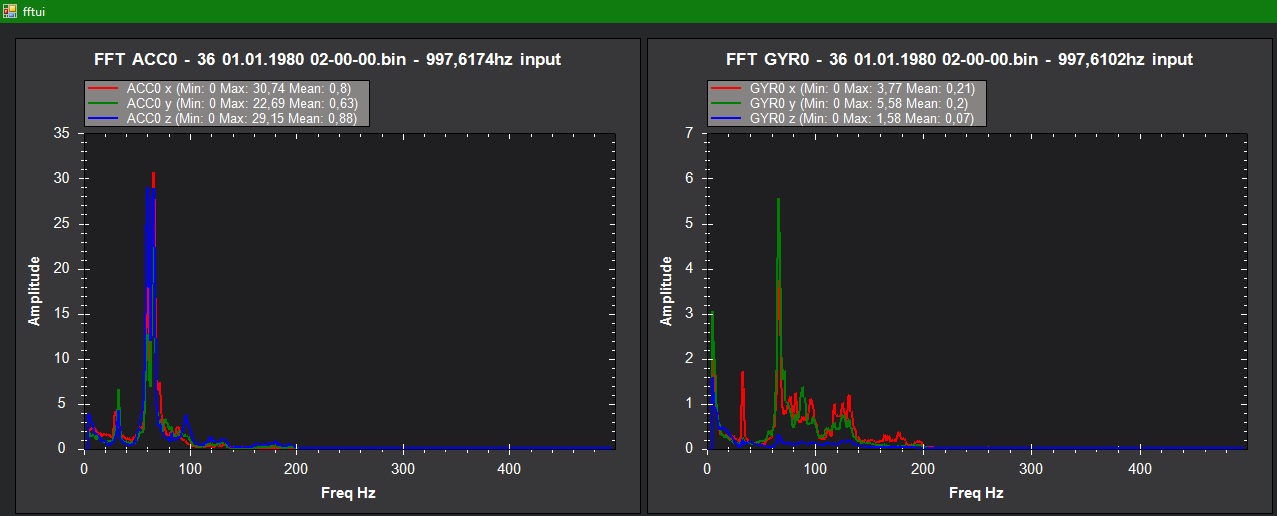
You will need to experiment a bit to find what is best, its not too bad. Looks like somewhere between 30 and 35
Okay will try today. Which value range can I consider good for my situation ? so,the ACC amplitude values between 10 and 15 is enough ?
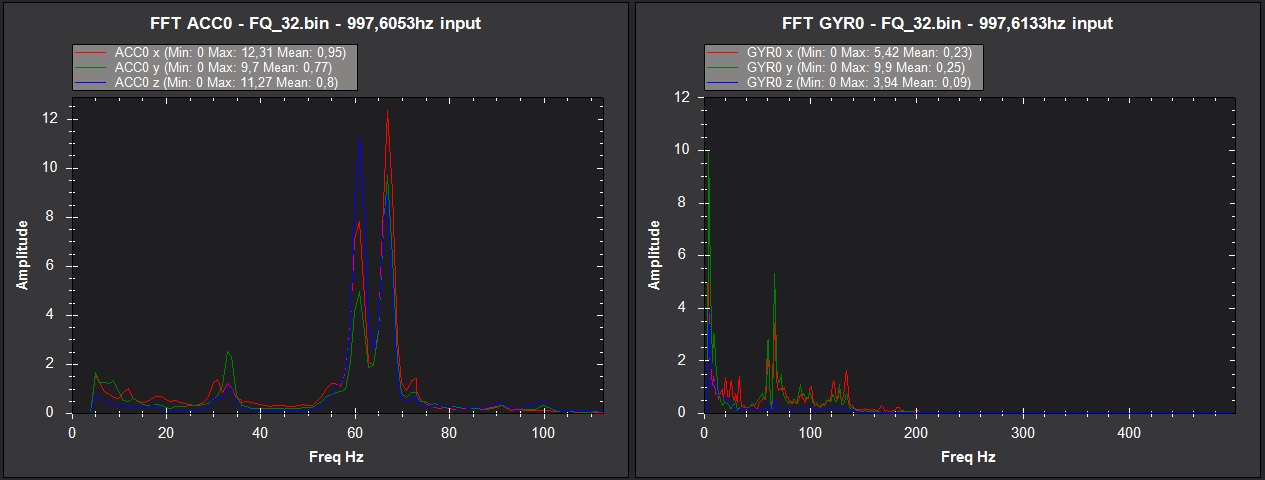
Hello again. can you help me to find which one is the better result. I tried all values.
Reduced INS_ACCEL_FILTER. compared to previous test.
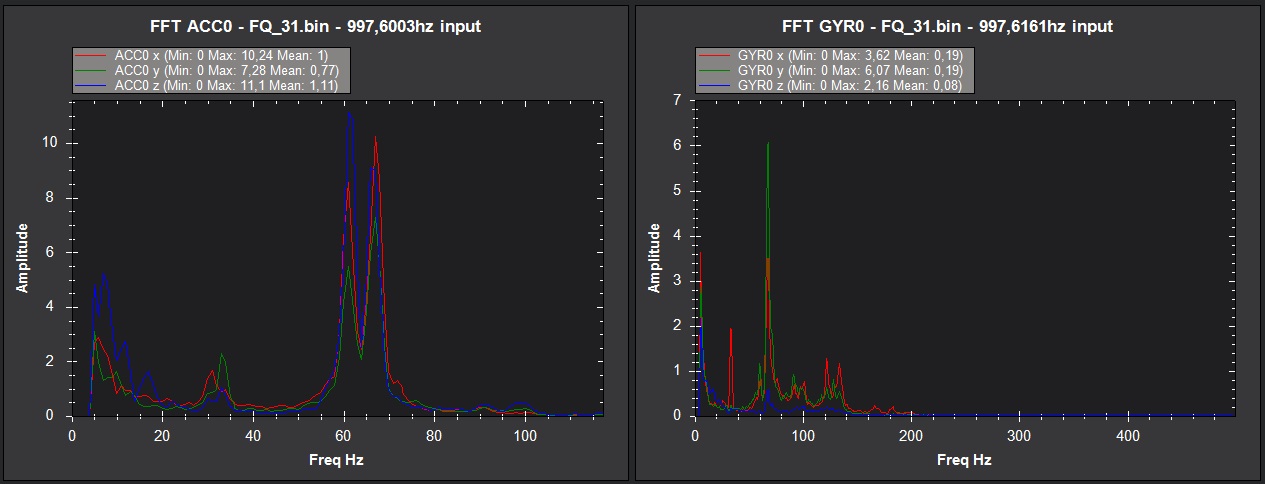
PRE-FILTER
https://drive.google.com/file/d/1f66I8Lrogc9h1Nypfi9o9o542TmMyMpx/view?usp=sharing
POST-FILTER
INS_HNTCH_FREQ 31
INS_HNTCH_BW 15,5
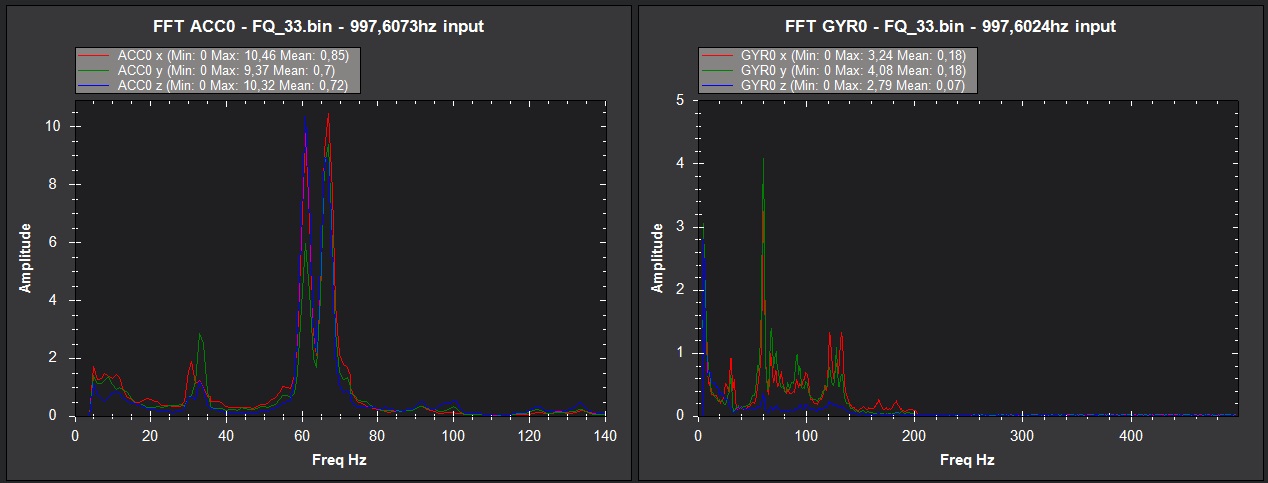
INS_HNTCH_FREQ 32
INS_HNTCH_BW 16
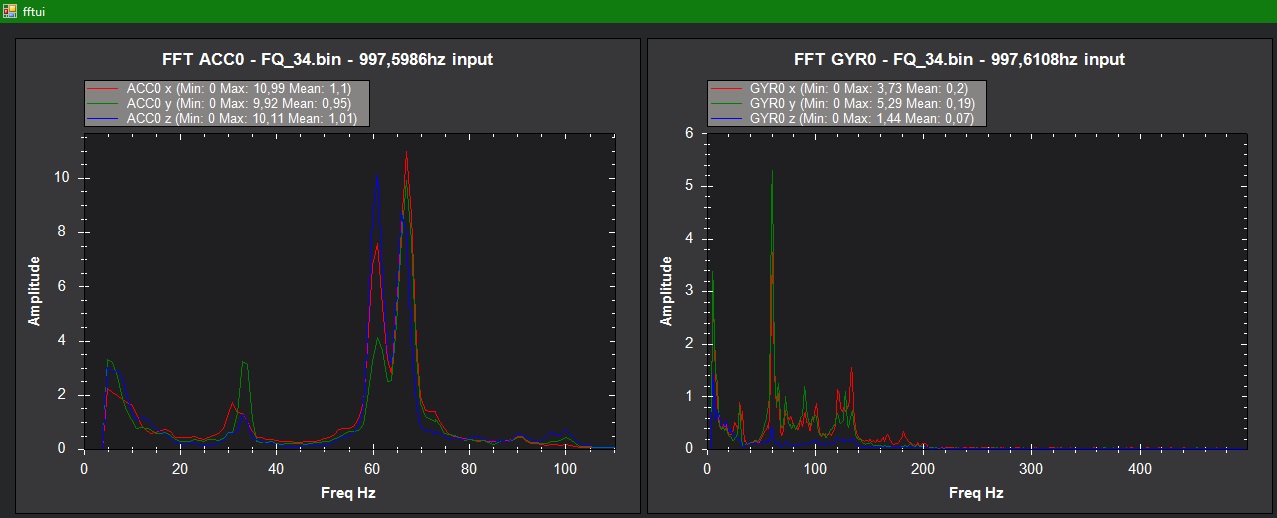
INS_HNTCH_FREQ 33
INS_HNTCH_BW 16,5
INS_HNTCH_FREQ 34
INS_HNTCH_BW 17
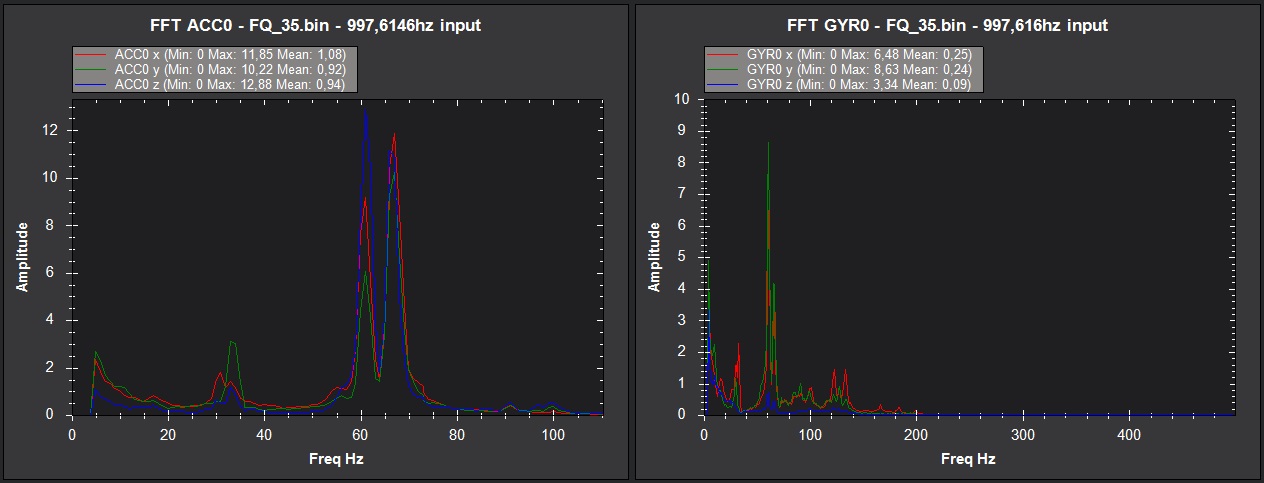
INS_HNTCH_FREQ 35
INS_HNTCH_BW 17,5
INS_HNTCH_FREQ 60,4
INS_HNTCH_BW 30,2
32Hz looks like the best