I will check the logs for motor unbalance. The Hexa is quite well balanced in roll and pitch and I have tried to “level” the arms/props as good as possible (but it is always a pain in the #&¤# with round arms )
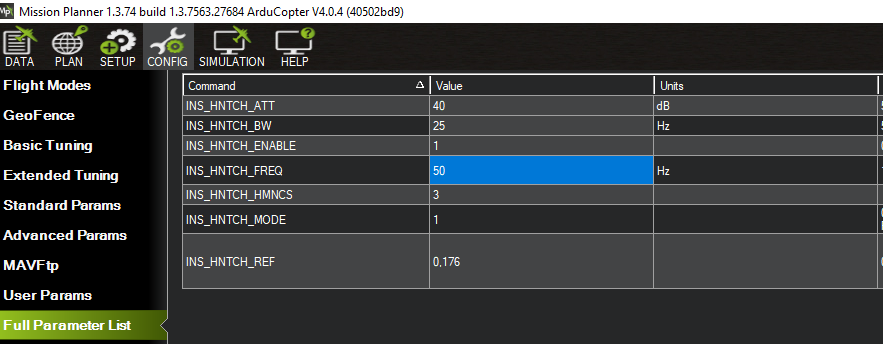
I will try the filter at 50Hz. BTW what is the theory behind picking the right value to attenuate the peak? I could not find anything about this in the documents (but I might just have missed it).
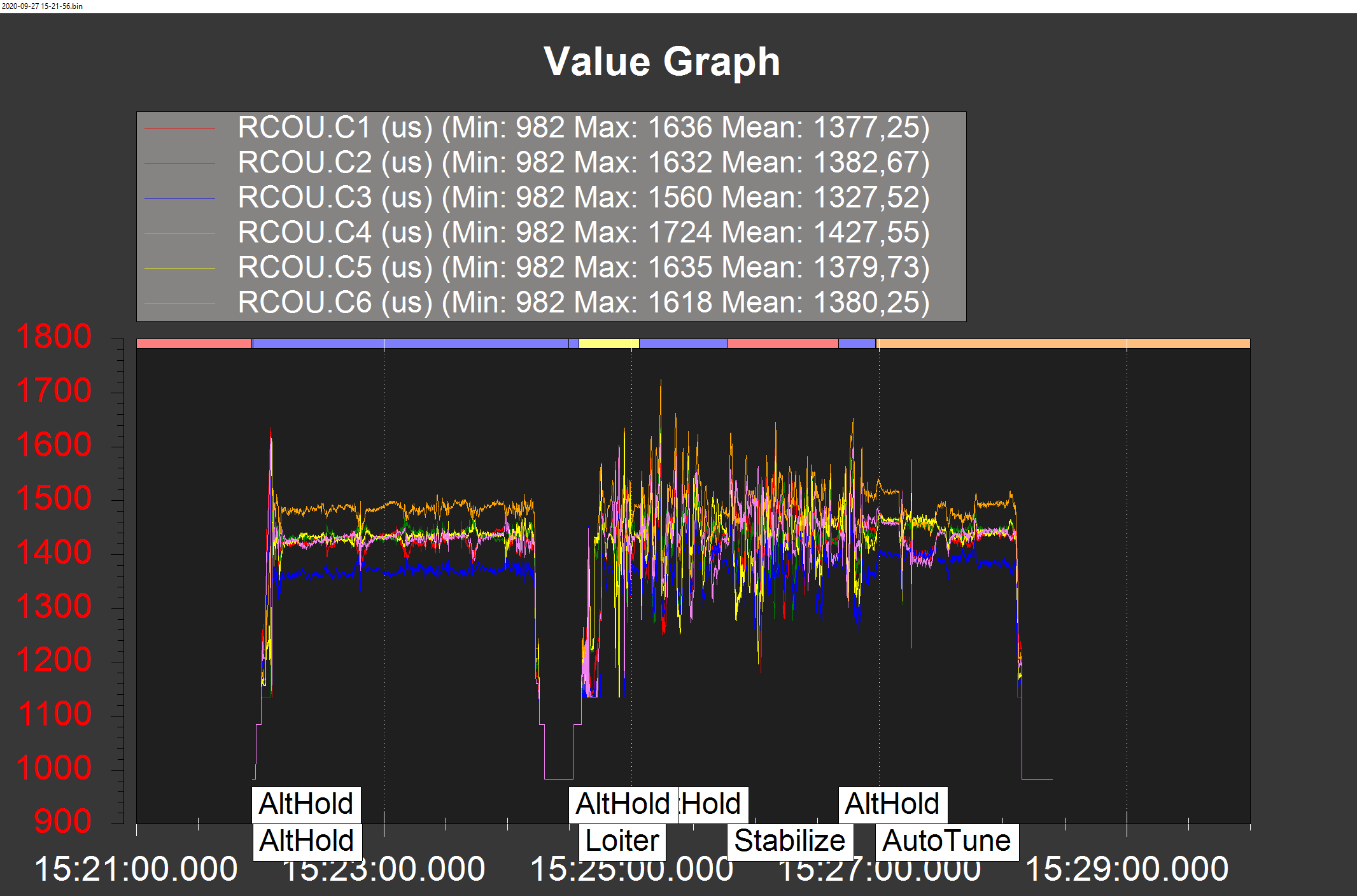
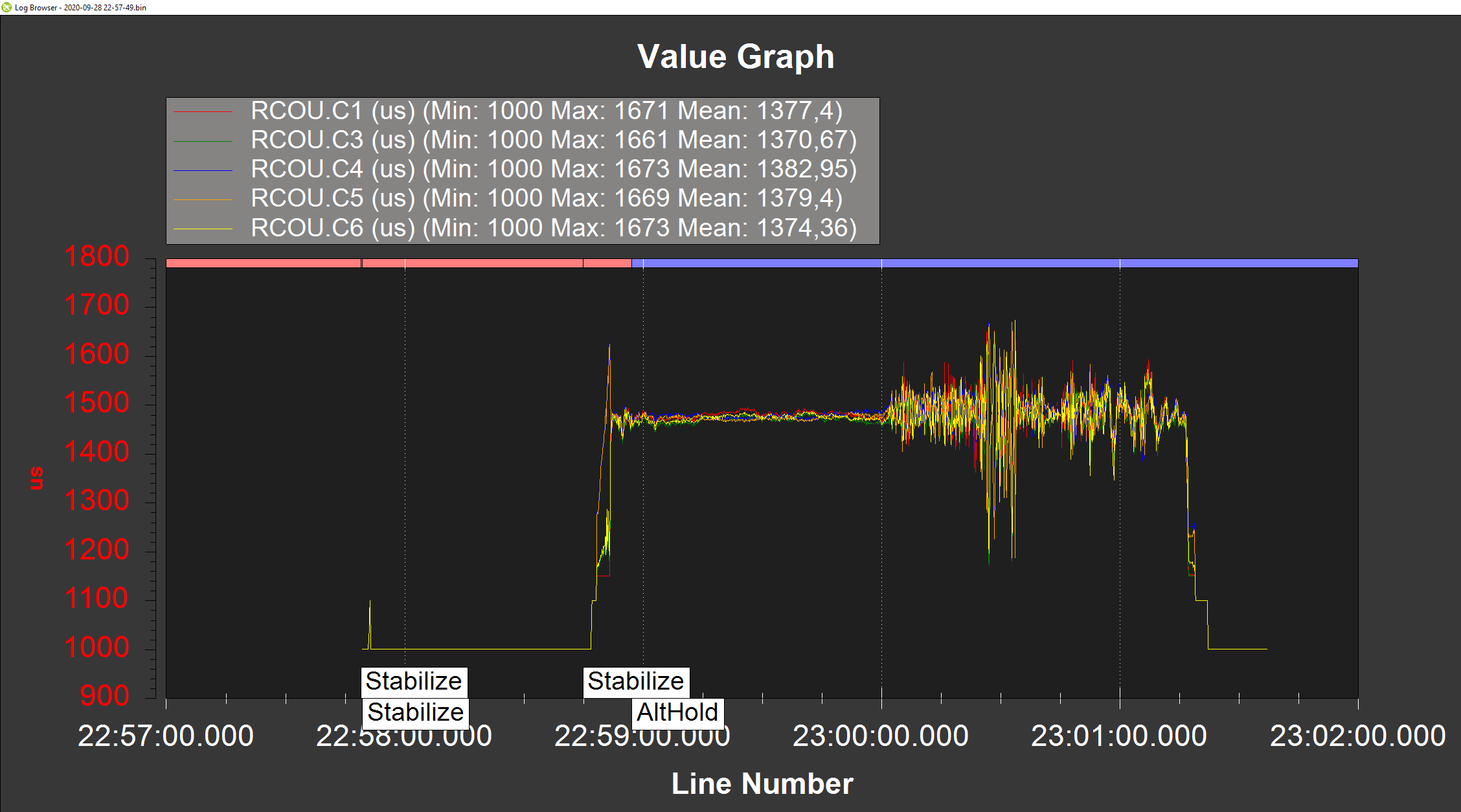
There seems to be some imbalance between the forward left motor (3) and the aft right motor (4). The balance is quite good (cg) and I know this has not been a problem before (motor balance). I might have introduced a slight twist somewhere and need to investigate it. Thanks for pointing it out.
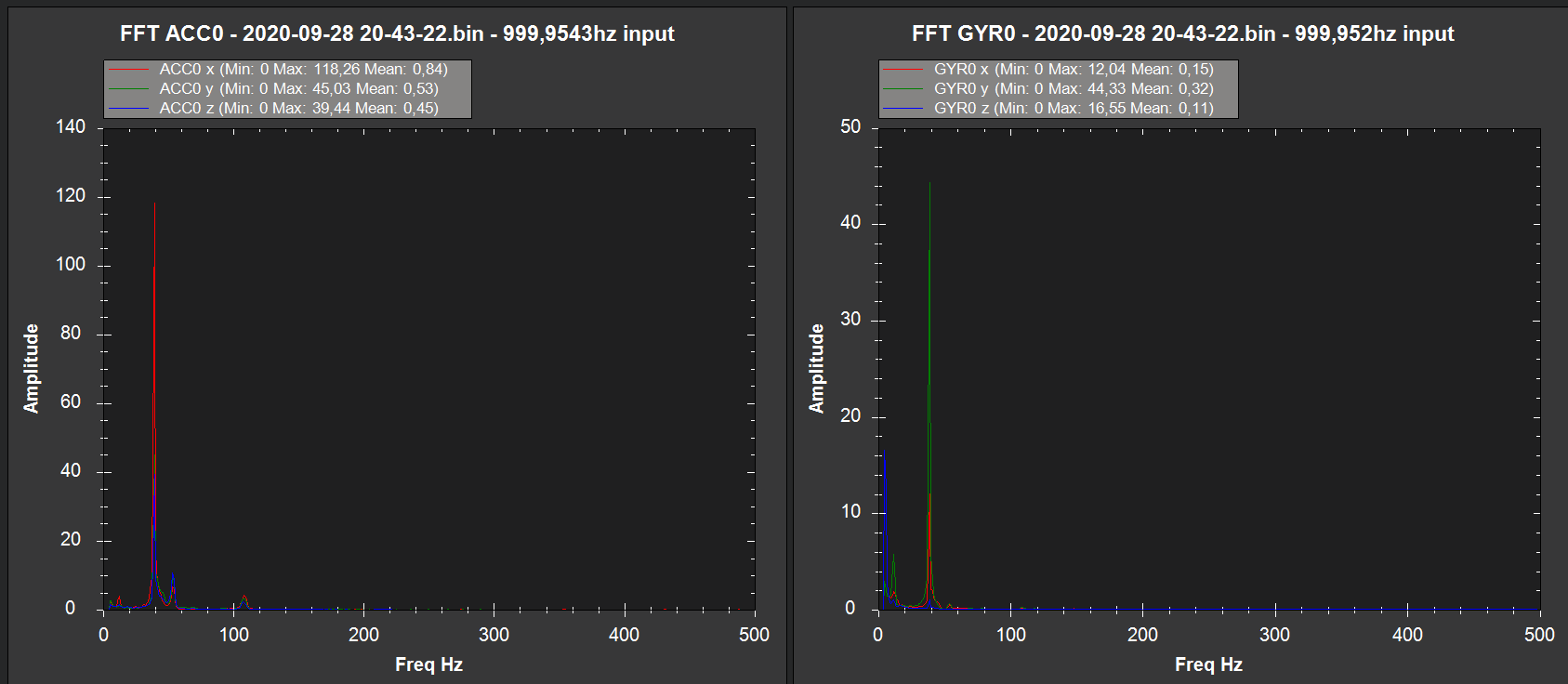
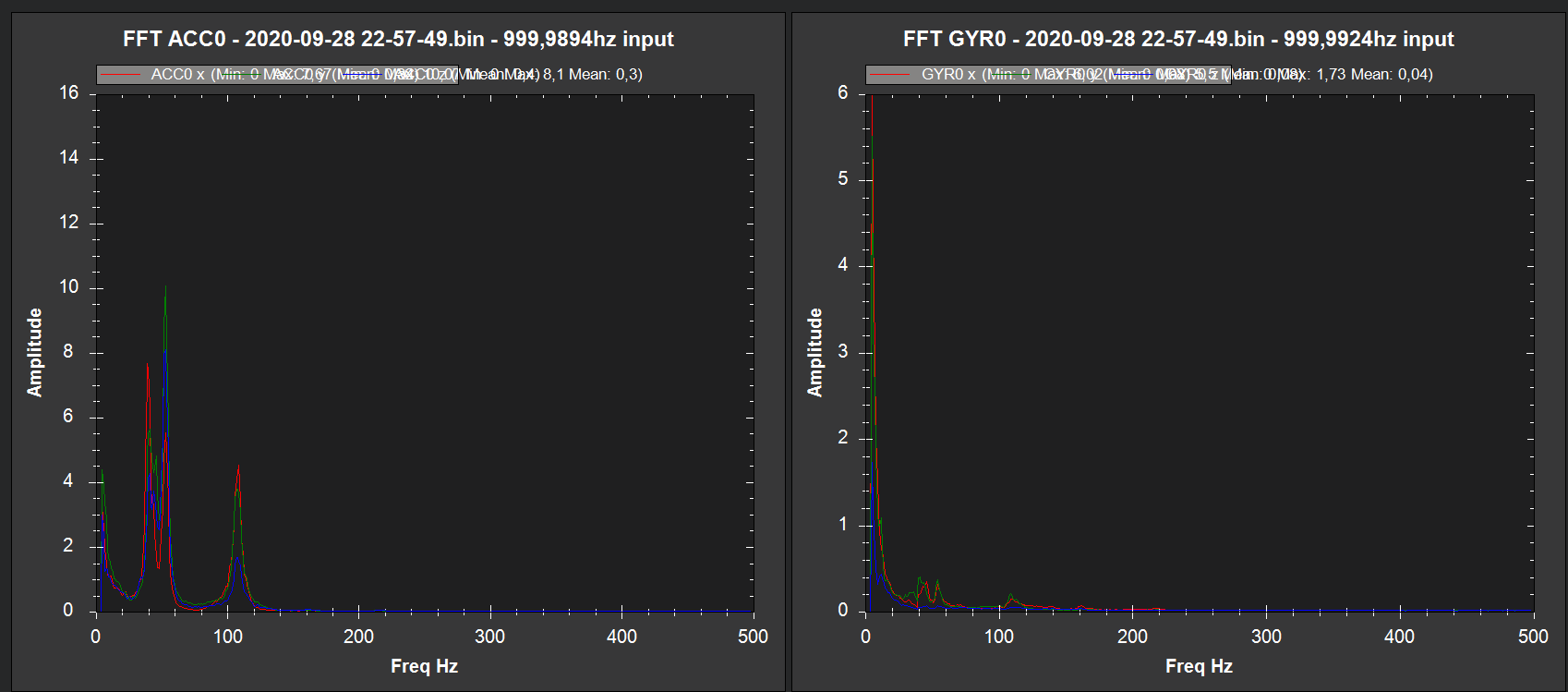
I have tested and made a new FFT graph with the settings from the above post (50Hz). I now have a distinct narrow 120dB peak at 39Hz (corresponding to the hover rpm at apx 2300rpm). The 100Hz peak is only slightly more attenuated than at previous 40Hz. I wonder if I might be better of at 40Hz and 20Hz bw but with 40dB attenuation? I am open for suggestions.
Here is the log file: https://drive.google.com/file/d/1FdtVq-V18Skja_7wkX44aOcT2fLzynsb/view?usp=sharing
Btw. the problem with the motor 3 and 4 being of, was most likely due to a stupid mistake I might have done more than 2 years ago when I replaced one ESC (HW Xroror pro 50)… I am quite sure I forgot to calibrate the end points on this new ESC… I guess the factory calibration was close but no sigar ;). I have now recalibrated all ESCs (at once) and the motor-balance looks as good as one might expect with the round arms.
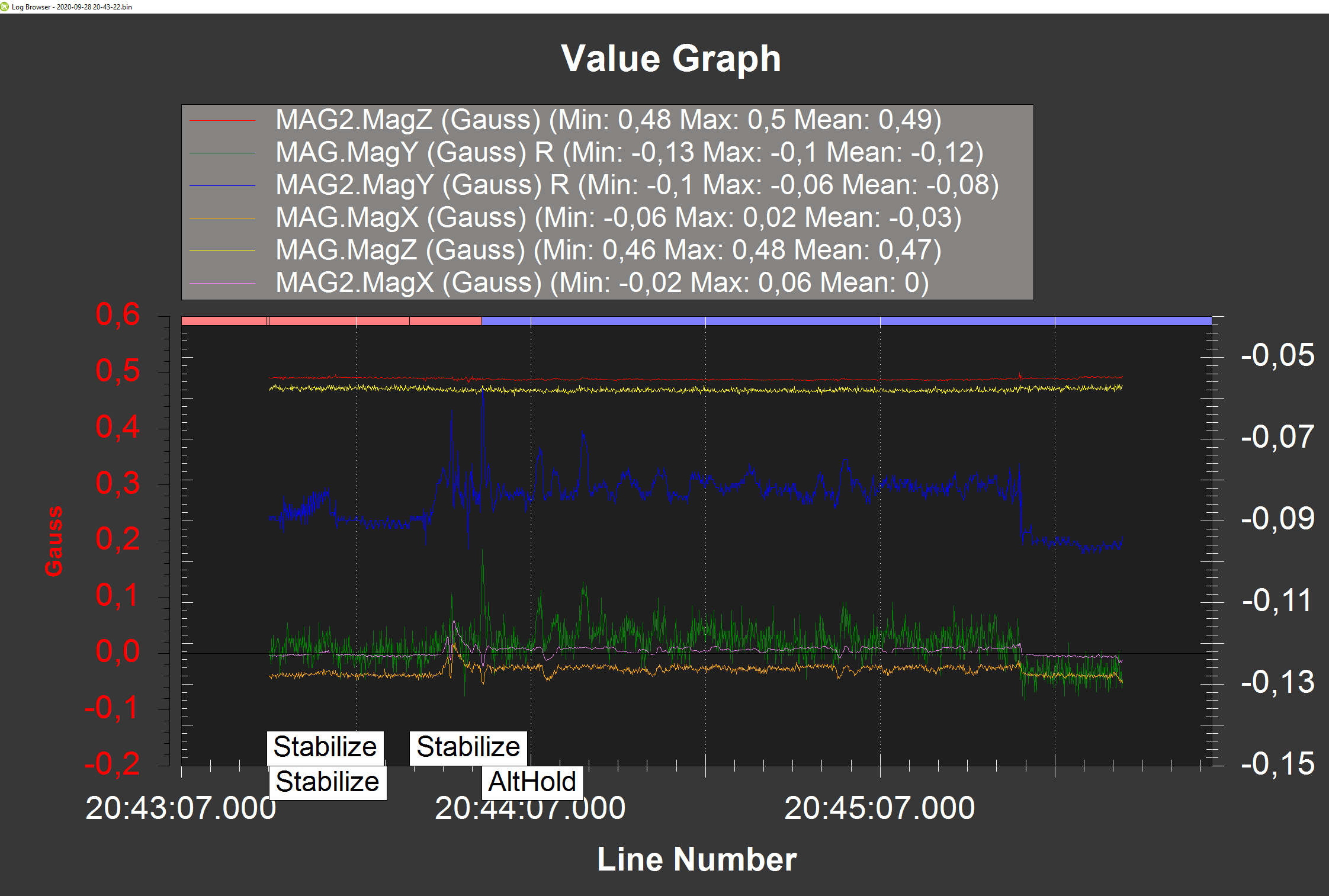
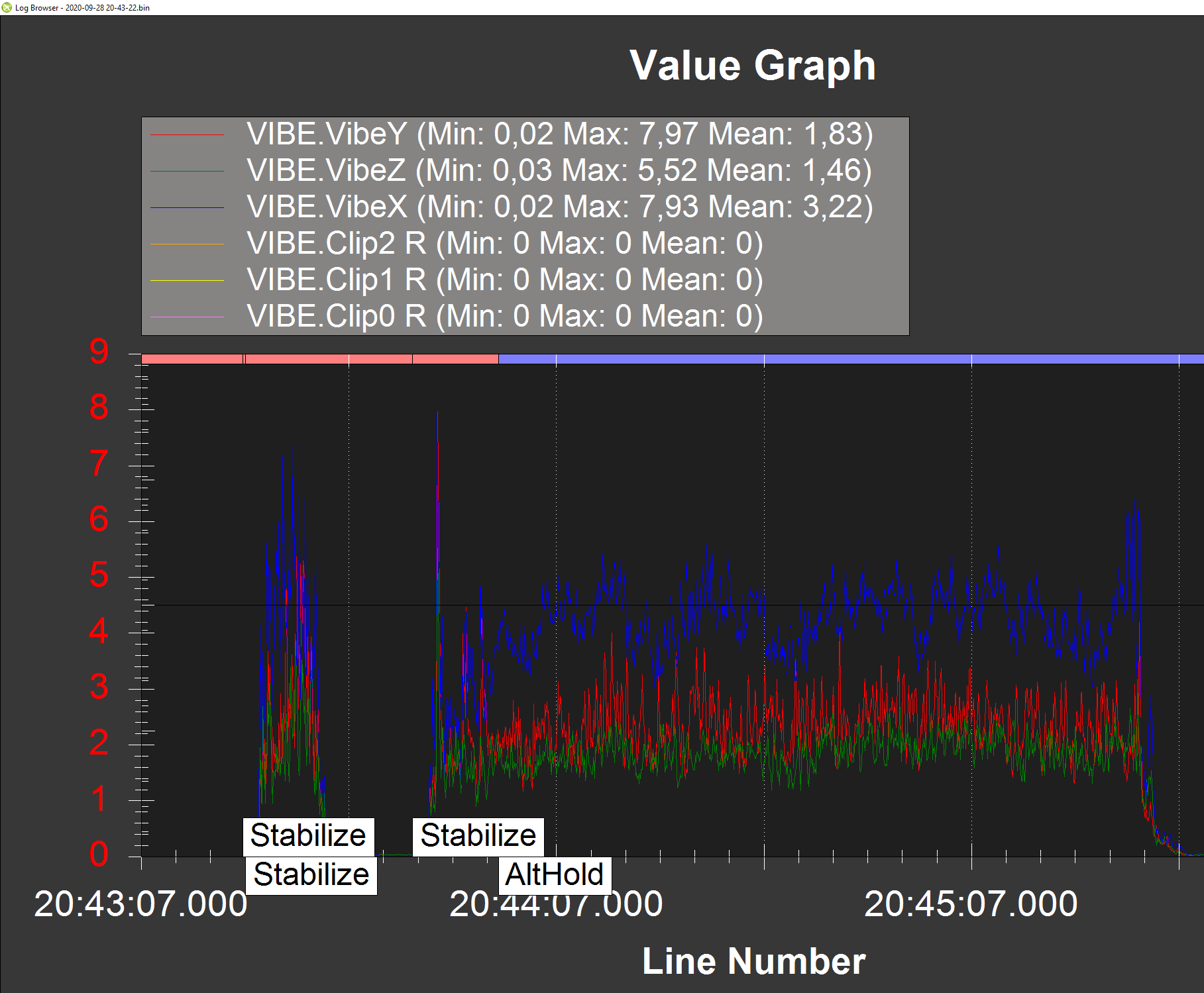
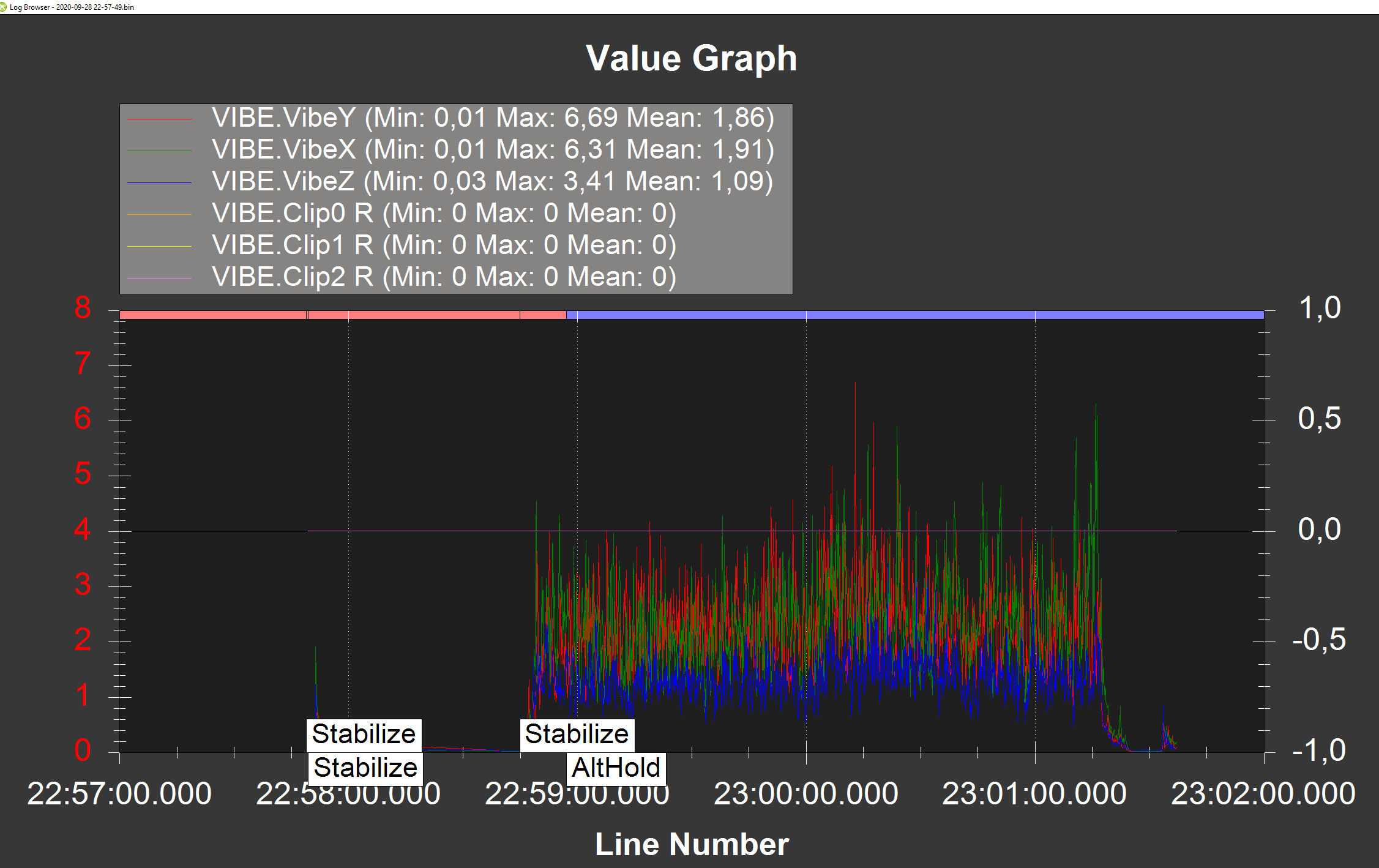
Just for information, vibes and mag-interference is quite low as seen below
So since you don’t have regular harmonics I supposed one peak might be frame resonance. I would put a static notch on 39Hz with the same settings and leave the harmonic notch on 50Hz. Dynamic flight will tell you whether the 39Hz peak is static or not.
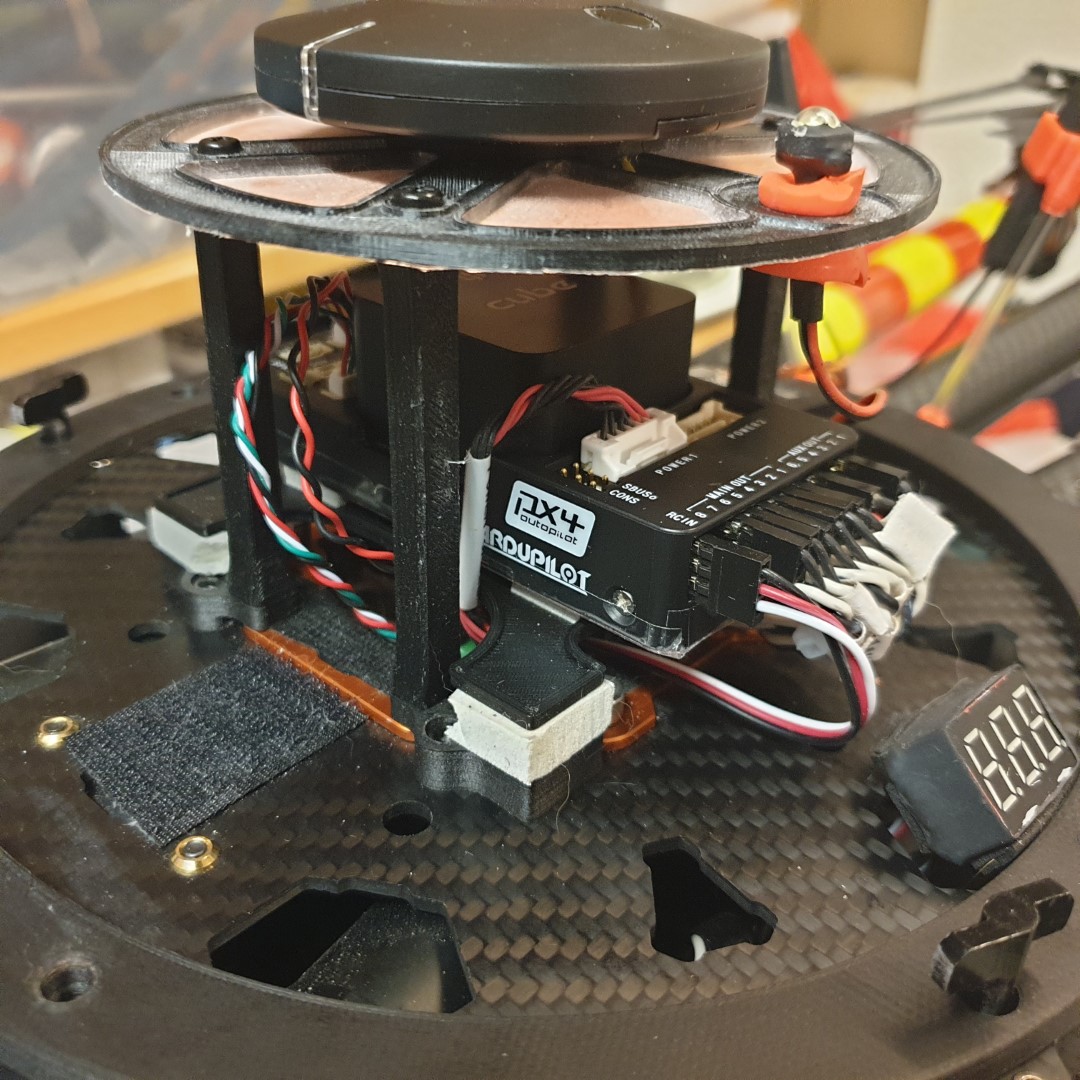
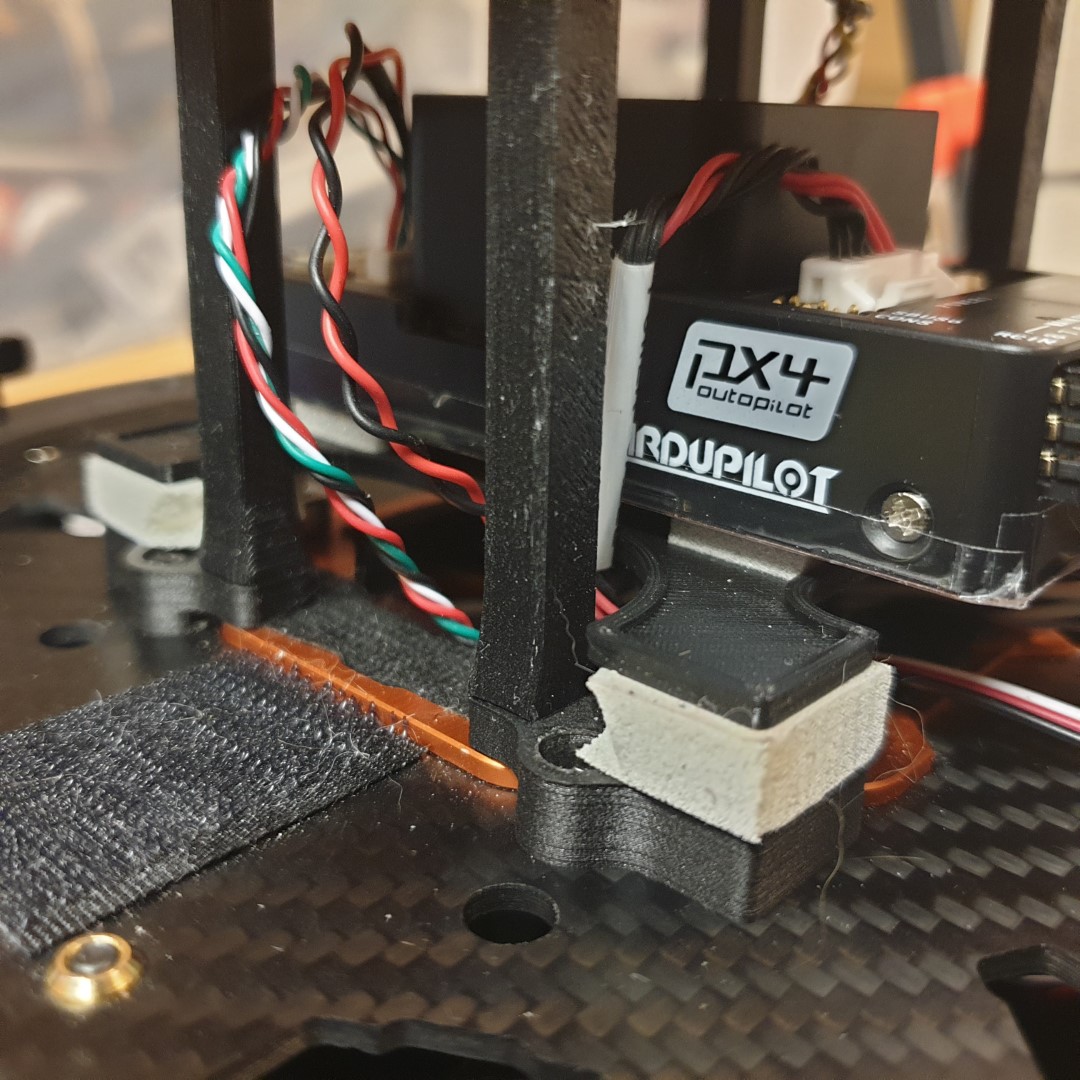
I have been through dozens of iterations of FC dampers over the years, using everything from various rubber dampers for gimbals to foam earplugs (or combinations of these).
The last years I have landed on the Dubro 1/4" foam rubber sheets for use as the damping element. I stick 3M ultrathin double-sided tape on both sides of the foam sheet and cut it into suitable dampers using scissors
. These are then fitted mo my OD 3D printed FC-holders (wider stance than what is possible if fitted directly under the FC).
I was going to guess that you spit out the Cube “must be hard mounted” cool-aid and used a compliant mount of some sort We see evidence of this routinely.
I feel that If you dont go crazy and dampen it to much, it can improve dampening vibes without "filtering out the “good vibes” necessary for the FC. The material used and mounting method also play in and my go to material as of now is the Dubro stuff
I have now done a dynamic flight with the static notch at 39Hz (att 40dB) and dynamic notch at the same 50Hz (att 40dB). It looks like the lower peak “moved” up or widened (extends about 37-57Hz now).
All in all the 39Hz peak and the 100Hz peak is attenuated by apx 2dB compared to the “dynamic only” filter at 39Hz.
Not 100% sure how to evaluate this and if there is room for further improvement.
Thanks for your response.
I see it’s a cube so there is some built in dampening as well.
But I will take what you say under advisement, wider base and the Du-Bro. Will order some of that,
I know the Cube has built in damping, but I guess it can be improved upon in some cases. Here is a screenshot after a more dynamic flight (after enabling the static notch at 39Hz). Even less vibrations. Motor balanse also seems good now after redoing the ESC calibration
It looks pretty good to me. To evaluate further you would probably need to be on 4.1-dev and use the in-flight FFT to look at how the frequencies are changing dynamically (or use some of Leonard’s matlab magic, but I don’t know how to do that).
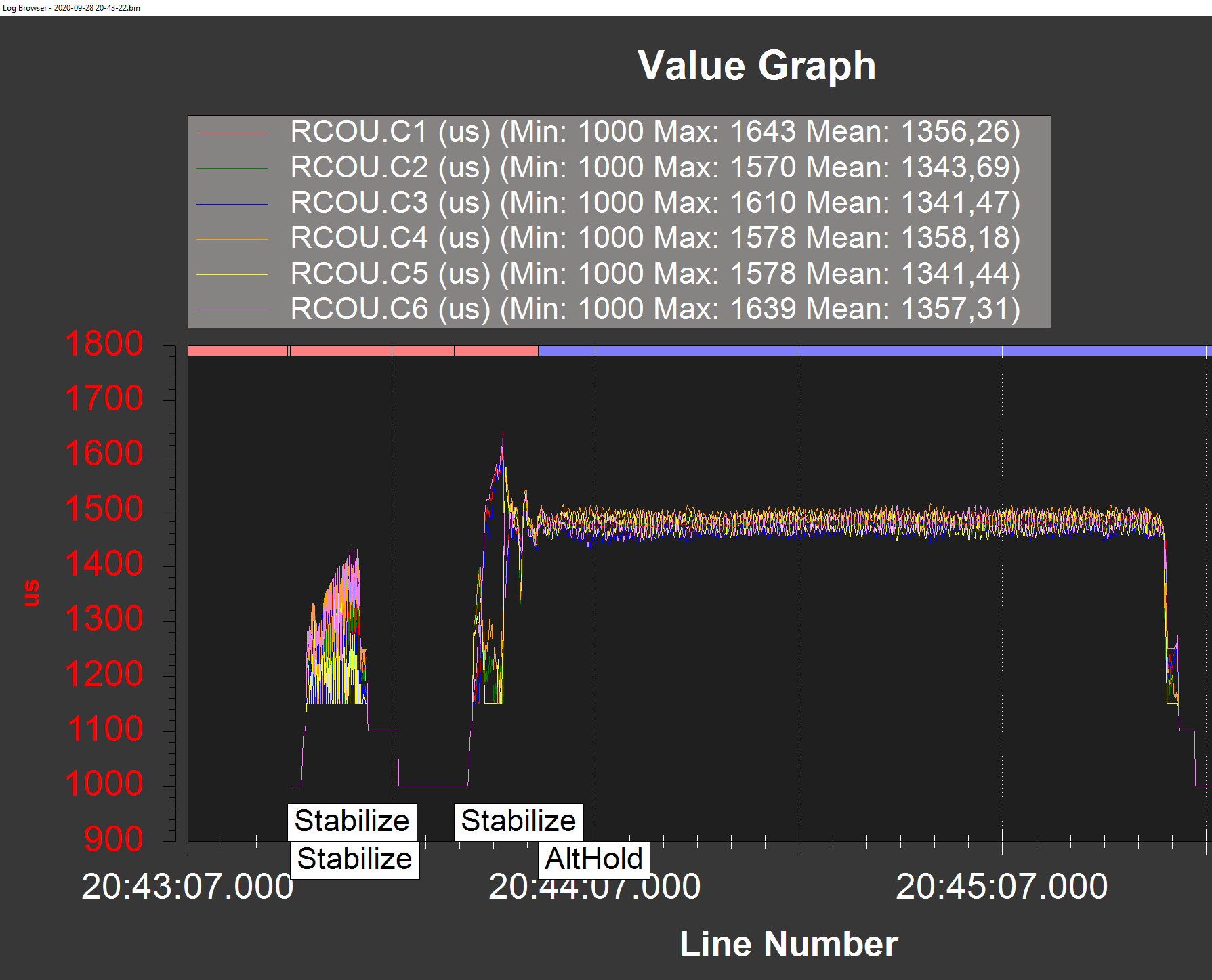
Maybe a simple test you could do is to try and do a fast run at a fixed throttle value and look at the FFT afterwards. What you are hoping for is that the 39Hz peak is resonance and basically stays fixed, if its not then you will see a peak as it escapes the static notch. If it’s not you would need some of the advances in 4.1 to do any better (double notch or FFT tracking).
The reason it matters is because you should now do another autotune and if the peaks are not being tracked properly the tighter tune can lead to instability at different throttle values.
What will be the action if the peak moves outside the the static notch using V4.0.X? Widen the BW or reduce the attenuation (the later should make it “sample” wider from what I read, but I might have gotten that wrong)?
I will try a fast run at fixed throttle as you said and If that goes ok, I will redo the auto tune.
I think all you can do then is widen the peak and pick the most troublesome - it may be that you have to switch around and put static at 50 and dynamic at 40 - but then of course you will miss the 100 peak.
One of the problems is that there are all sorts of mechanical resonances and control loops going on here that can change the shape of the problem as you start filtering - so there is no hard and fast answer.
@andyp1per
Sorry to be back asking about the notch again.
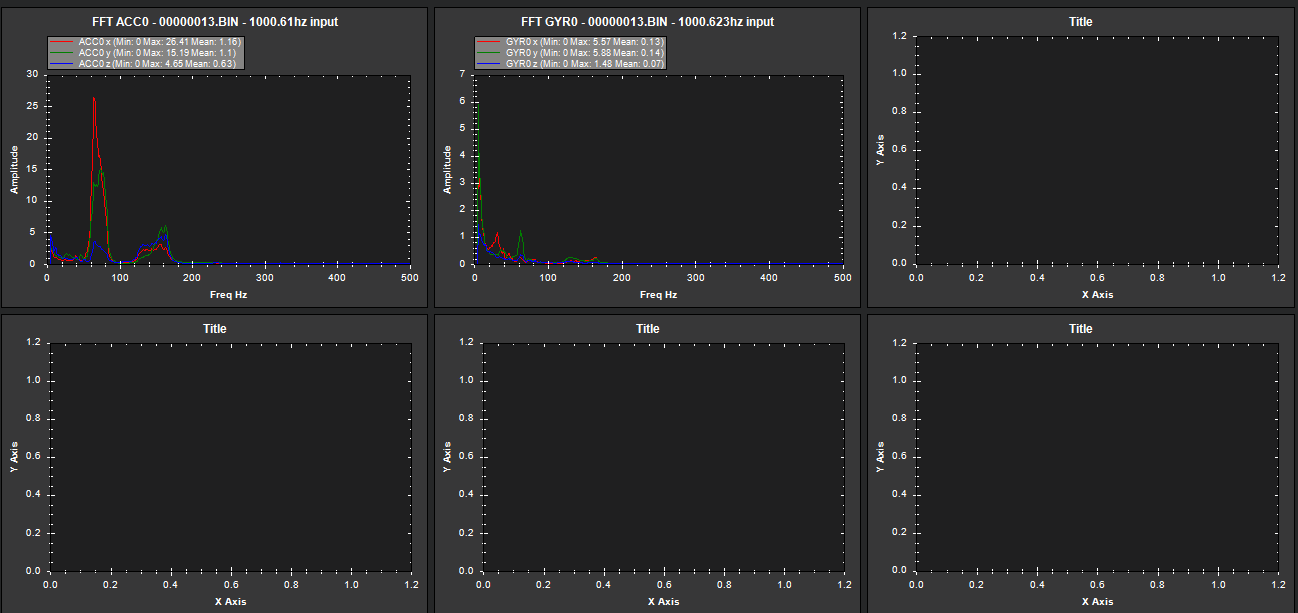
But these are the results after using the notch for a while. Thought today I would check the DF log and this is what I see
These are all the settings. This machine does have BLheli32 telemetry on board and working if that makes any difference.
INS_HNTCH_ATT,30
INS_HNTCH_BW,35
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,70
INS_HNTCH_HMNCS,7
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.2184839
INS_LOG_BAT_CNT,1024
INS_LOG_BAT_LGCT,32
INS_LOG_BAT_LGIN,20
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,2
INS_NOTCH_ATT,20
INS_NOTCH_BW,20
INS_NOTCH_ENABLE,1
INS_NOTCH_FREQ,70
I think you are hitting the lower limit of INS_HNTCH_FREQ,70 which is why you have a little peak below that. I think you should consider lowering INS_HNTCH_FREQ and re-calcualting ref on that basis - the wiki has the details. Other option is to use INS_HNTCH_MODE,3 and INS_HNTCH_REF,1 which will give you better tracking (you will still need to lower INS_HNTCH_FREQ but won’t need to recalcuate stuff)
 )
)