You mean something like this Not sure what to lower the frequency to but the center of the first peak is 65. so will try that.
I assume I should Autune again after this.
Still wish I could get the vibrations down. grrr
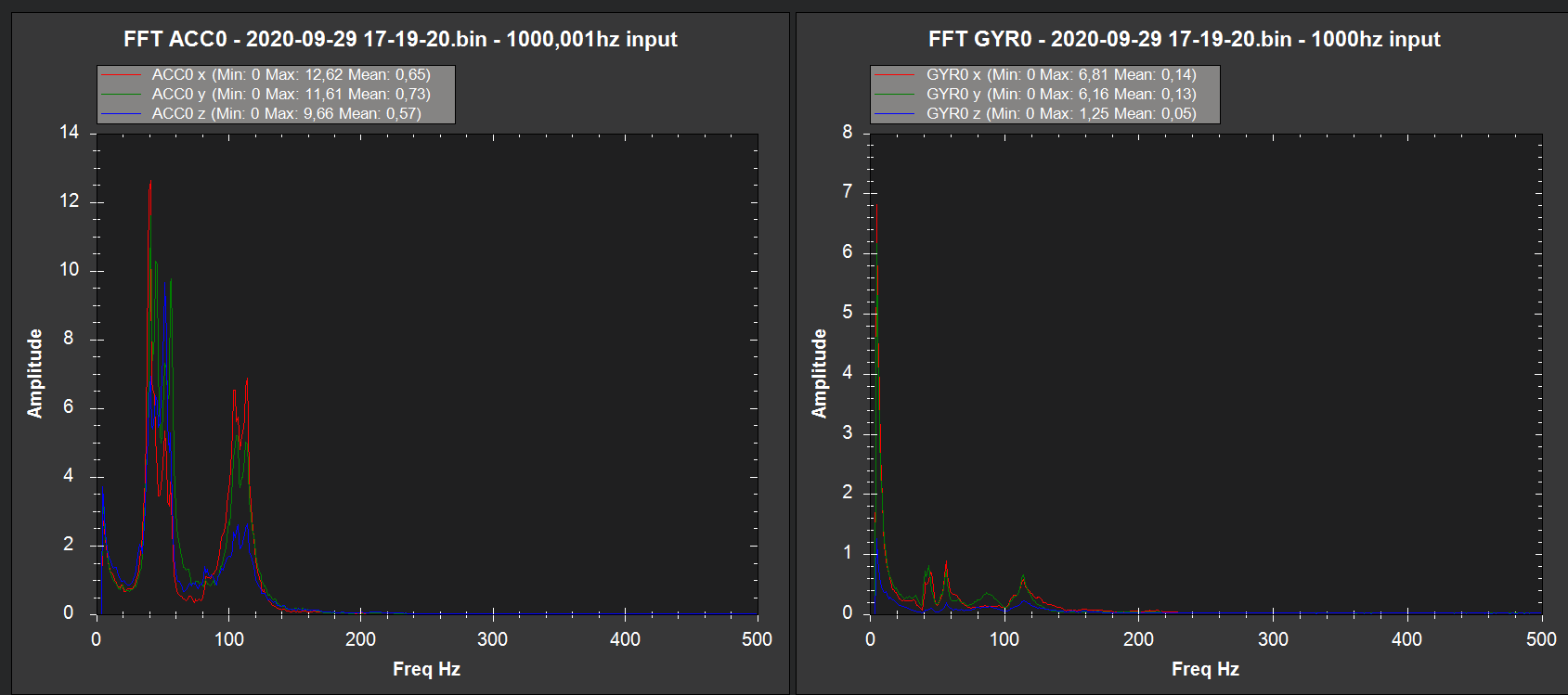
From what I can tell the FFT log looks quite good. I gave it a run for the money hitting about 25 m/sec (56mph) at multiple runs forwards, backwards and sideways, at constant throttle input (stick center). The vibes look good to.
Looks good! Often the second harmonic is clearer and in your case that goes from about 100-120Hz (so first harmonic is 50-60Hz), so I think sticking with the dynamic notch at 50 and static at 40 is the right way to go.
One thing to consider for the future is that the Solo builds showed some instability when the weather changed - the notch will take out so much noise that you can get a really, really crisp tune - but if the notch becomes less effective the crispness can turn into instability. The theory is that for the Solos the difference in air density between summer and winter made the difference. So I think my advice would be not to over tune - or make sure you retune if conditions change substantially. For you it may not matter since you will be tuning unloaded anyway which I guess is the exception rather than the rule.
In-flight FFT or ESC telemetry is much better in this regard since it tracks the actual noise.
Andy help me understand something.
noise that is sorted by the notch filter are they gyro or Accell.
Vibrations X Y and Z thats IMU…so not related.
Sorry sounds dumb. But trying to learn this stuff.
Trying to get my head around this whole subject as I am struggling with vibrations
Notch takes out gyro noise which is what matters for the control loops and which is pretty much the only thing that matters in manual modes.
The accels are important for EKF-controlled modes but the EKF has noise filtering built-in so in theory you are not supposed to pre-filter (although we do a little).
Vibrations are measured by the accels - but the IMUs are the physical devices that measure both gyros and accels.
Can this x-class blheli_32 esc be a good candidate for a 7kg T900 hexa swinging 17" propellers on Dualsky XM5015MR-7 340kv motors and 6 cells?
I was playing with the idea to replace the Hobbywing Xrotor Pro 50A (DEO) esc’s to get esc telemetry (to simplify the notch setup)? If not, what other candidates are there?
Thanks for that Andy…that helped a lot.
You mentioned pre-filter accel data…what filter does that or is it buried somewhere.
I recognize that if I have vibrations that non of these things will resolve it. It’s mechanical in nature and I need to hunt down the cause. But Like I said…its all about learning.
ah ok.
Is there documentation that shows what is good versus bad vibrations.
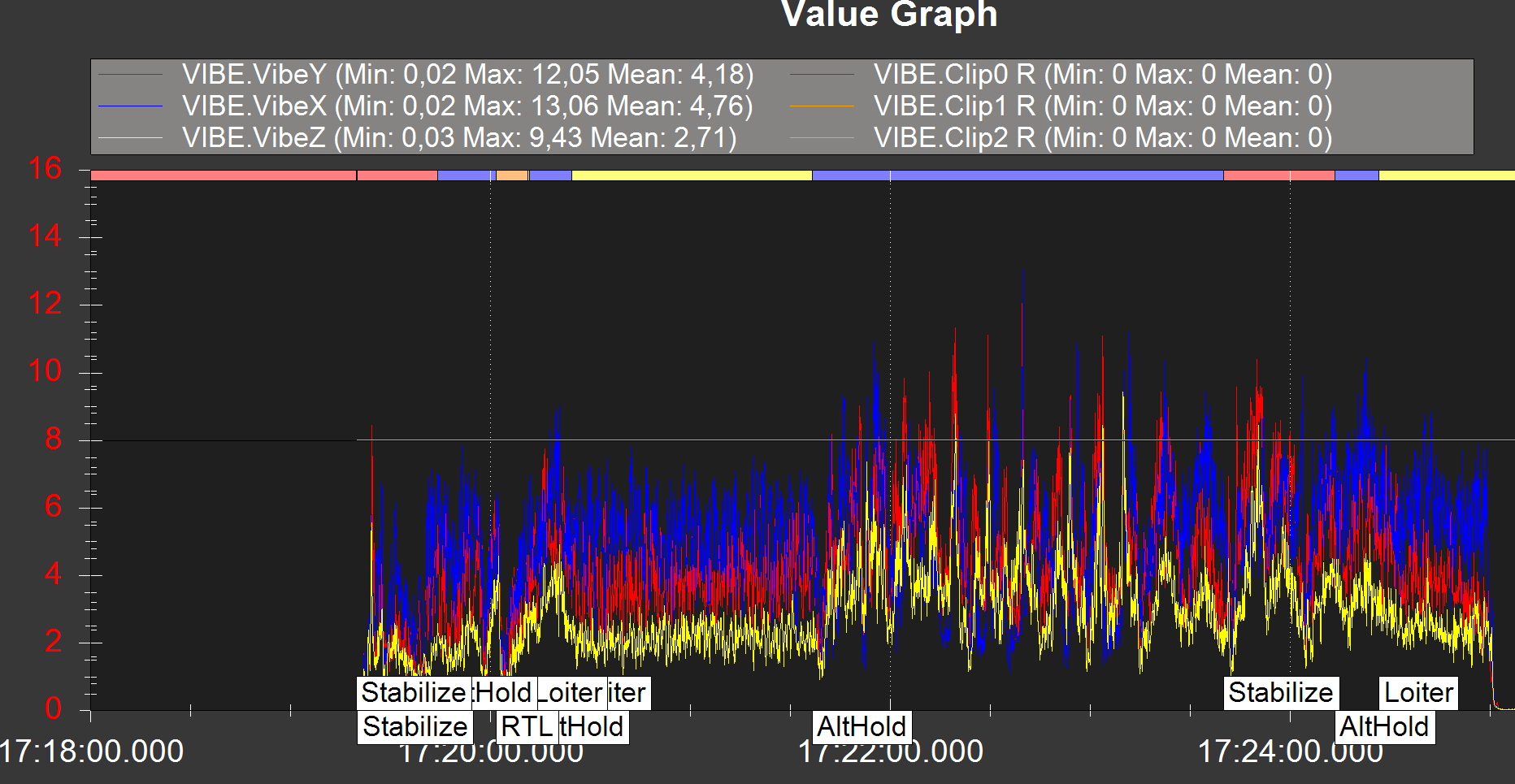
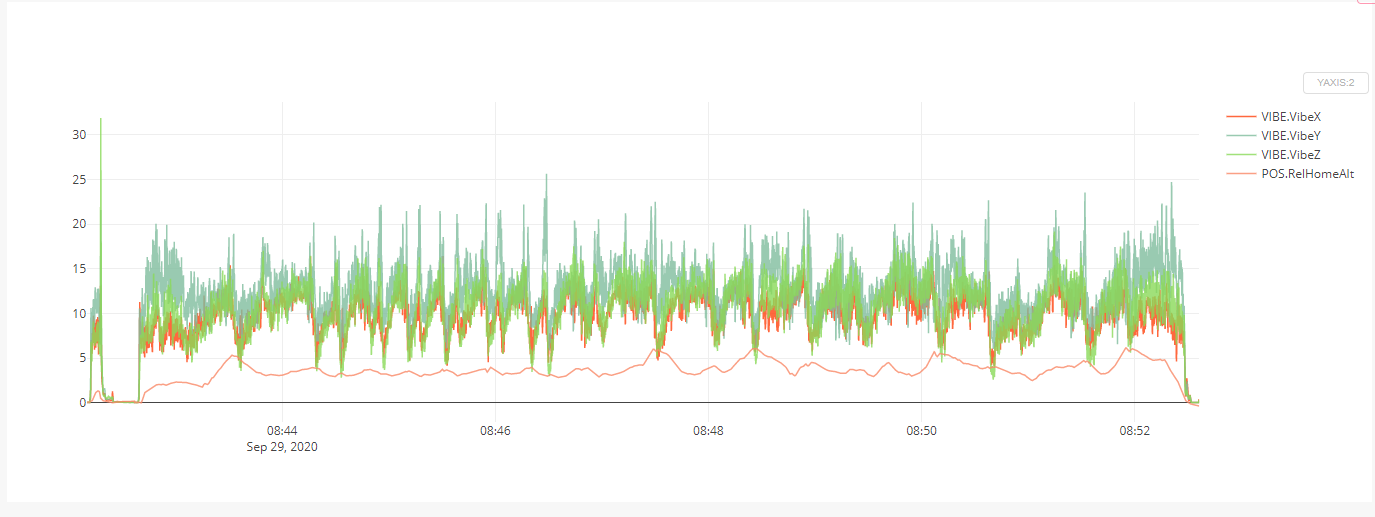
This is my result from today, No clipping, but still seems high to me compared to others.
But is it high…
I think those vibration levels are too high if you were hovering or flying around slowly and smoothly. If that was fast forward flight then it would probably be acceptable since you can get more prop-wash across the flight controller and centre plates.
The fact that it’s consistent across the width of you graph (ie: those vibes are present the whole time) says there’ll be big trouble if something comes loose or a prop goes slightly out of balance.
I’d be looking for the average level to be below ten, with fast forward flight giving slightly higher levels around 15 or so on occasion.
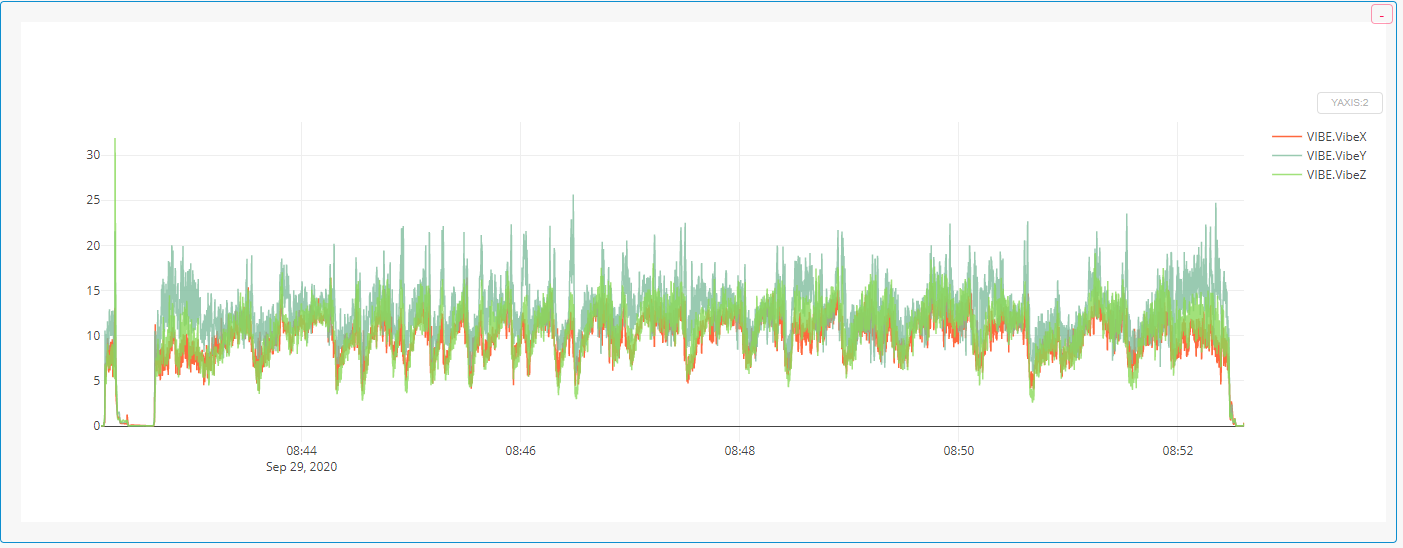
This is reasonably aggressive flying:
The vibes look a little high, maybe, but there’s no clipping at all and HNOTCH is doing it’s work. This frame is very stiff and is probably really good at transferring the vibes, and no doubt props need a balance - they were only balanced with small bits of tape and some didnt like the ride
Hey Shawn
Hope all is well with you and yours.
So first I agree the vibes are too high. This was forward flight, No real hover it was off the ground and go. I would not say it was super fast. I worry about Vibration compensation kicking in and I get another crash so I am not going super quick.
I have balanced the props. Right now they sit perfectly in what ever spot I set them on the balancer…I couldn’t ask for anything more there.
As for Clipping I noticed slight clipping on those flights… Somewhere around 6 but with Andy’s help I have a slight change to the filter to apply.
Today I spent 2 hours going over each wire looking for anything that was rubbing or perhaps to tight. I found two problems there.
One wire tie down that actually was up against the flight controllers dampener. This was corrected.
I also found one power lead to the rx that goes past the FC dampener that was to tight and hard up against the dampener. This two was corrected.
I also added more length to the GPS leads as I found they may have been a tad tighter then I think they should.
Not saying any of this will make a difference. But I did notice the Y axis vibes are the highest and that can’t be motors and props. So I hope that helps.
I have a spare motor on it’s way. I am going to balance that motor and install it. Each motor that I replace will get balanced and used to replace another motor till I have balanced each. That’s all I can think of.
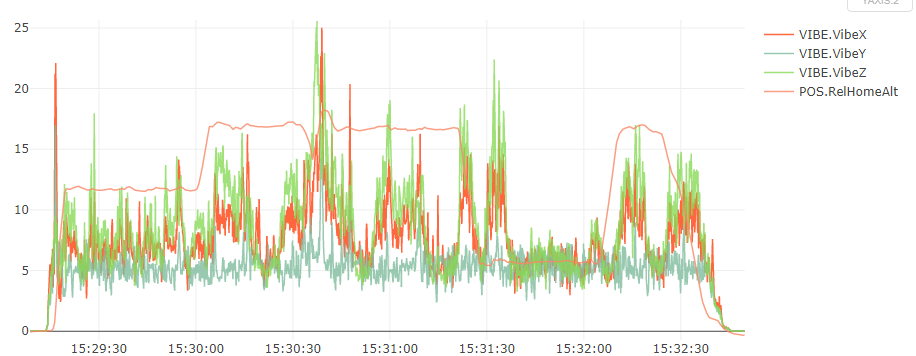
one question…The graph in your comment where is that from.
This is my most recent flight.