I think if you know what you are doing then your experience is the best
Where can we find the latest tool now that is merged?
Great, thanks
Corrado
Thanks for your excellent work Andy. It might be mentioned here, but I could not find it; I am refitting our SAR hexacopter with a Cube Black on latest FW (Pixhawk1 before).
The copter is based on a Tarot T900 frame using 17 inch propellers. Flying weight with no payload is about 5.5kg. The regular payload weighs about 1kg (gimbal with IR, zoom and night camera), but it can handle more if needed (apx 2kg payload is normal but it has been tested with 4.5kg also).
My question is how do you set up the notch filters as the motor_thst_hover would change somewhat based on the payload used?
Do you set it with no payload, the regular 1kg payload or other weight?
In the case of setting it up with the 1kg payload, should it be done with a securely mounted 1kg payload or the actual gimbal (the gimbal is soft mounted and “moves” somewhat under the copter?
Thanks in advance
Ronny
1 Like
It doesn’t really matter - it is the relationship between thrust and frequency that we are trying to capture - so either way you do it should give you a sane answer. The only question is how low you want the notch to go - probaby therefore better to do the measurements without payload since that will result in a lower frequency/thrust measurement.
1 Like
That was really fast Andy and thanks for your input. It makes sense 
I tuned a 550mm hexacopter a few months ago using the “new” tuning guide and your recommendations for the notch filter. It is by far the best flying Arducopter hexa I have tested. I hope to get the larger T900 to fly just as well
Regards Ronny
… but also thinking about it we are dependent on MOT_THST_EXPO being correct to linearize the thrust. This will likely change with your payload so I guess figure out if it changes enough to matter.
Hey Andy
Another quad to tune the Notch on
This is my current graph
I think based on this graph these are my settings for the filter. I think, using ESC telemetry.
INS_HNTCH_ATT,30
INS_HNTCH_BW,30
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,60
INS_HNTCH_HMNCS,6
INS_HNTCH_MODE,1
INS_HNTCH_REF,1
Esc telemetry (assuming BLHeli) is INS_HNTCH_MODE 3
Start with HMNCS at 3 and see if you still have those later peaks - my guess is you will not
cool and yes to the blheli. It’s awesome.
So these then
INS_HNTCH_ATT,30
INS_HNTCH_BW,30
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,60
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
So based on mot_thst_expo, it might be best to tune the notch with the weight most often used (as I can not really see any reason for flying the hexacopter without at least the gimbal (1kg)? If that is the case I can attach a 1kg dummy payload securely mounted to the frame and do the tune.
Problem is, if you are ever going to fly without the payload you must do autotune at the unloaded weight otherwise you will have an overcooked tune and the potential for instability. However, to get the best tune you should tune with the notch enabled. So I think safest still to do all of this unloaded and then see how it responds loaded.
Thanks again Andy. I will do as you advice
There’s a ton of great information here and I’m trying to follow along but after 650+ posts it’s getting a bit daunting.
Any thought of creating a new “part 2” with a summary of the current state and then move forward from there?
I had a full tuning session today:
Compass_Mot calibration (less than 5 at 75% throttle) so I kept all 3 compasses enabled.
After that I did a full tuning with initial setup, checking vibration levels, autotune and Notch filter. I felt the hexacopter flew quite well in the end.
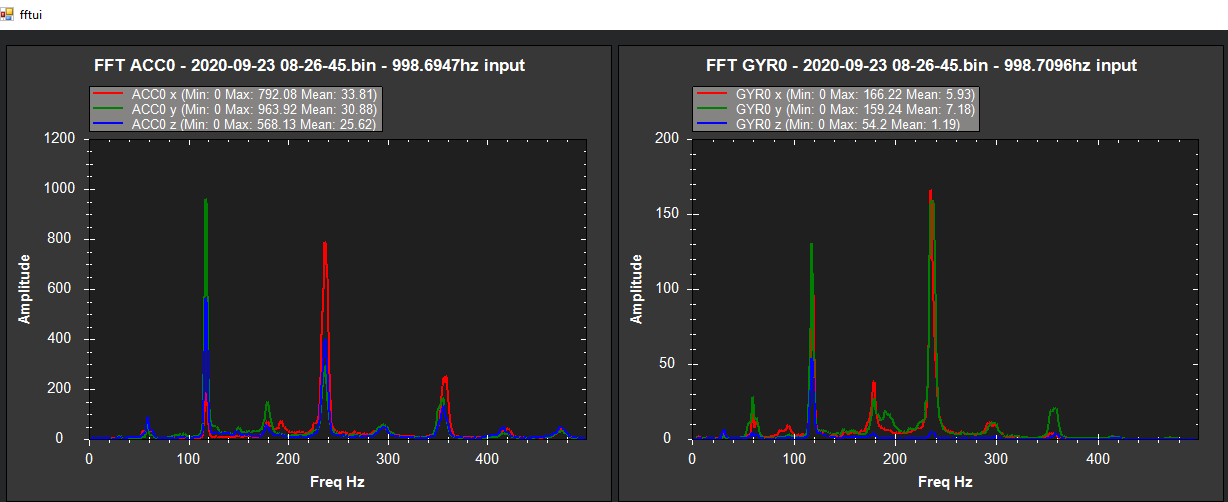
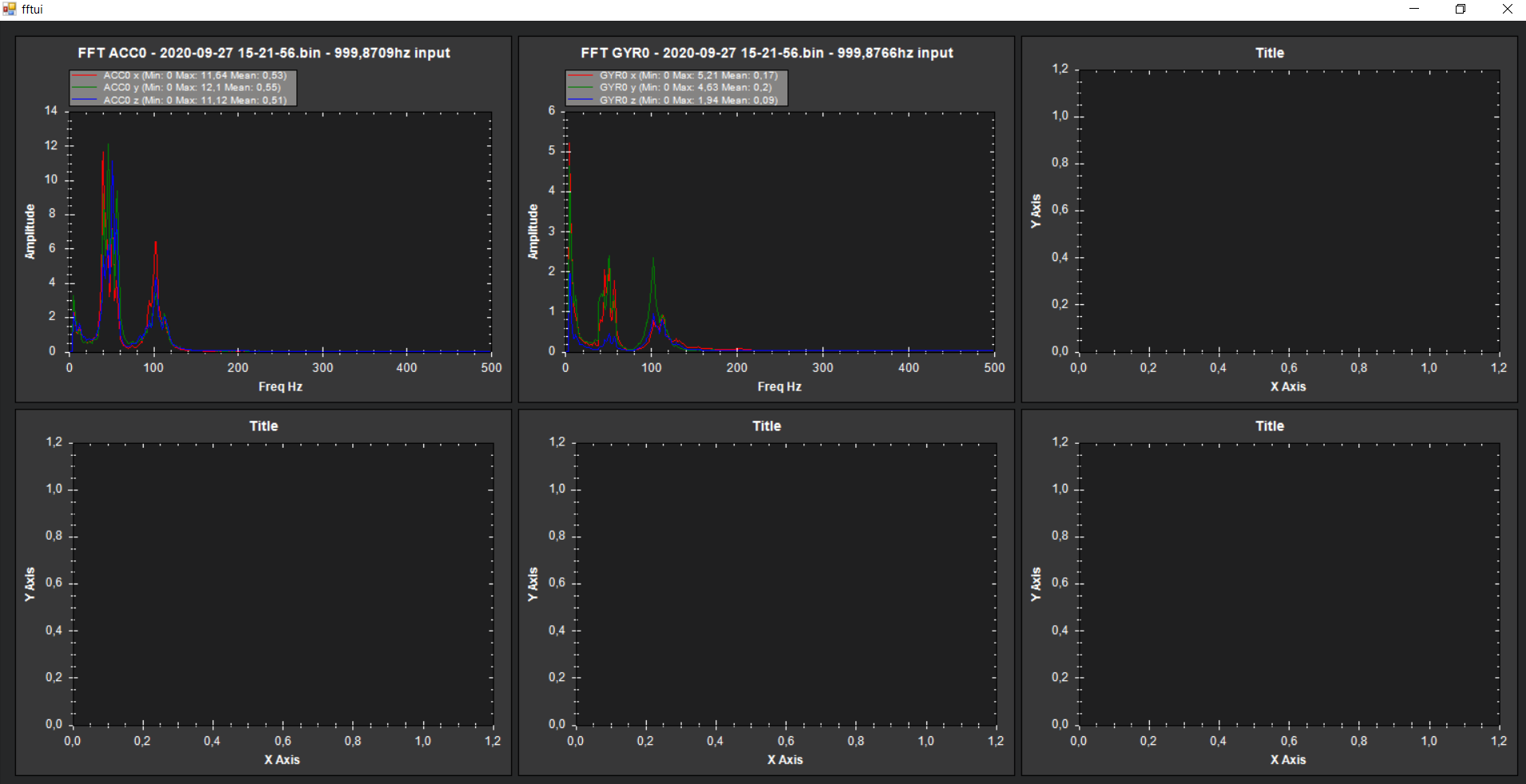
Attached are FFT screenshots before and after the flight, .bin file from the last flight of the day and a picture of the craft.
Thanks for all the help Andy
How does it look?
https://drive.google.com/file/d/1gURJsU_tn_3tmerbXJ-7PY3Fnhd-l2S8/view?usp=drivesdk


Looks good, but I expect you can do better. Can’t get at the file. Can you send your params? Also when you have the notch done properly you should redo autotune.
I redid the link above, but here it is also. Hope you can access it now.
I will send the parameter file as soon I download it
https://drive.google.com/file/d/1gURJsU_tn_3tmerbXJ-7PY3Fnhd-l2S8/view?usp=drivesdk
Here is the .param file.
v4.0.4 after autotune and notch.param (18.6 KB)
Thanks In advance
Regards Ronny
It’s little bit of a head scratcher. I think you are killing the 40Hz peak but then being left with the 50Hz and 100Hz peaks. I think increase ATT to 40 anyway but maybe see what happens when you put the first harmonic notch at 50Hz rather than 40hz - it may be worse, but who knows. How well balanced is the frame? Maybe you have some props turning at different speeds.