any help please @andyp1per .
You haven’t set INS_HNTCH_REF - nothing will work without this. It needs to be roughly the hover throttle.
Hello .
here is my new results:
thrust hover : 0.237141
I couldnt decide min_freq for INS_HNTCH_REF to calculate REF value. so i set a a little below of hover thrust value.
hover_thrust * SQUAREROOT( min_freq / hover_freq )
INS_HNTCH_REF 0,22
INS_HNTCH_BW 54
https://drive.google.com/file/d/1ugFMEStdw7RM-qYL52MA5_8v5G6qc74f/view?usp=sharing
INS_HNTCH_REF 0,22
INS_HNTCH_BW 40
https://drive.google.com/file/d/1Q0vviS58xDP4tm5wr16-OoRd00kS3eYZ/view?usp=sharing

Thank you…
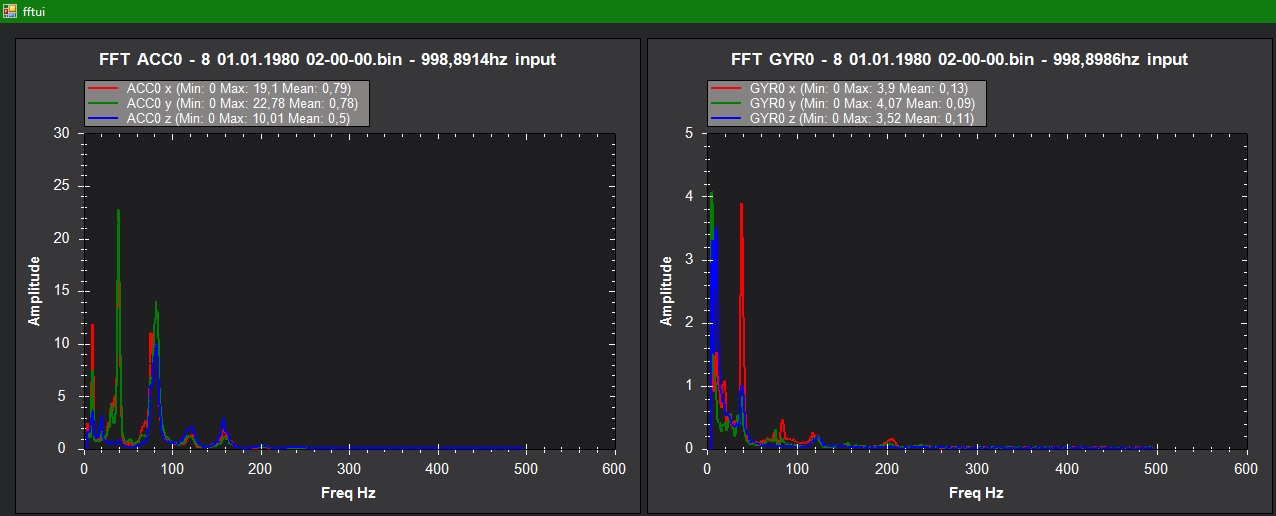
How big is this copter? Looks like your fundamental might be at 40Hz rather than 80Hz…
Frame : OCTO Coaxial
Prop : 28 inch
Total weight : 18 kg
Motor: T-Motor U8 (12S)
Wheelbase : 1200mm
Pre Filter :
https://drive.google.com/file/d/1zrwIVNyQ-Y_gtIP7A_goJf0v3wdUVcq_/view?usp=sharing
But highest notch is at 81Hz in pre-filter graph.
Perhaps you should set INS_LOG_BAT_OPT to 0 instead of sensor rate logging and make another data collection flight.
This is why you want to get it roughly right and iterate - you can see more once you have squashed a lot of the noise.
So I think set
INS_HNTCH_FREQ 40.5
INS_HNTCH_BW 20
other parameters can stay the same.
1 Like
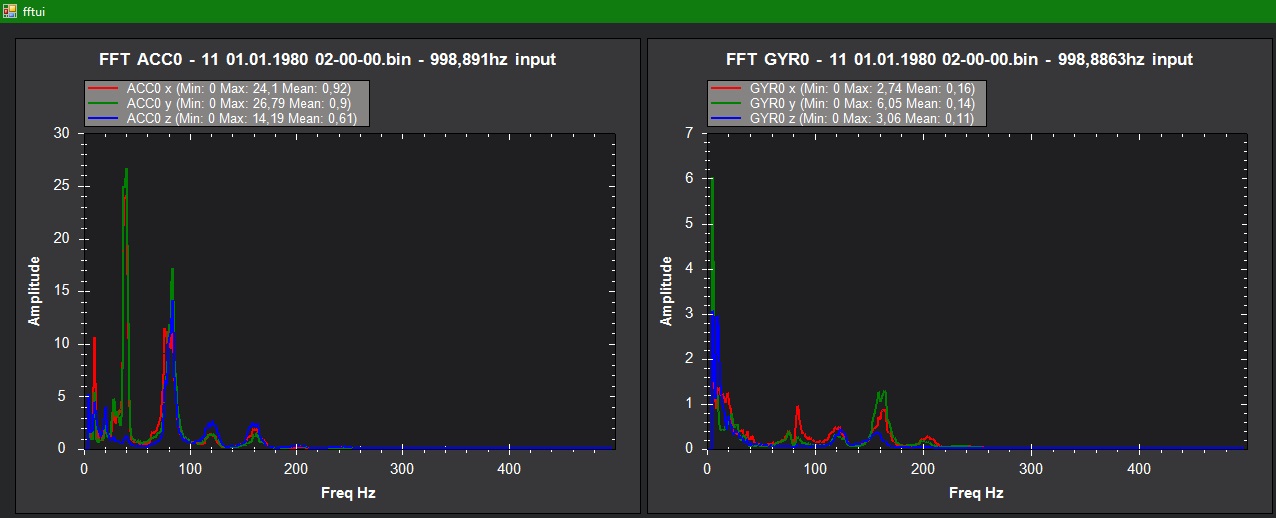
I did a new flight for Pre-Filter data collection log. Because i need to change MOT_SPIN_MIN and MOT_THRUST_EXPO. pre fligt result changed a little, i don’t understand why.
Also changed MOT_THST_HOVER : 0,2166591 (Auto hover learn)
Pre-Filter :
INS_LOG_BAT_OPT 0
INS_HNTCH_ENABLE 0
https://drive.google.com/file/d/1tyBRlWX6x_xrbucCV7s70t9g0R2jlj9Y/view?usp=sharing
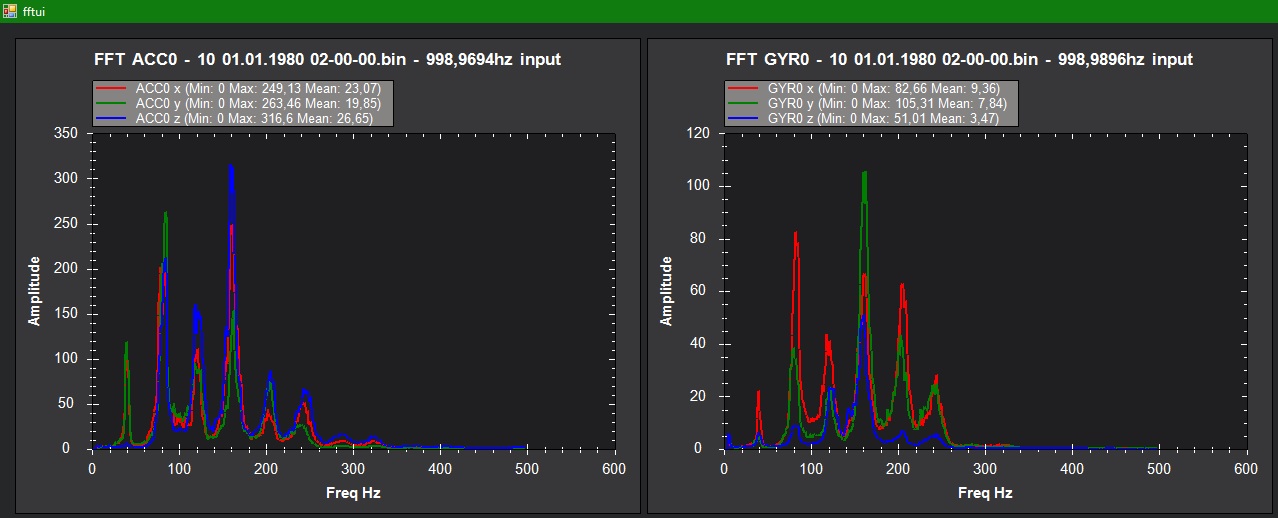
Post_Filter :
INS_HNTCH_FREQ 40.5
INS_HNTCH_BW 20
INS_LOG_BAT_OPT 2
INS_HNTCH_ENABLE 1
https://drive.google.com/file/d/1OouhJyAluPTJLCYhUzu1wBEe9pPkRPj8/view?usp=sharing
That looks decent. What flight controller do you have? You could potentially try INS_HNTCH_OPTS=1 to enable the double-notch to see if that attenuates the peak any better
Controller : cube
Firmware : v4.0.3
i wanted to use double notch option (INS_HNTCH_OPTS) before but i couldnt find in my cube parameters.
Glad the result was decent  how can i improve the result better right now ?
how can i improve the result better right now ?
But can you explain detailed why my fundamental frequency is 40 hz instead of 80hz. i couldnt understand.
in addition, can you help me to find min_freq. Can you say a value as looking graph.
I’ve put up a PR that attempts to spit out suitable harmonic notch parameters given a pre-filter log from a stable hover:
I’d be grateful if anyone interested could try this on their log files to see if it gives expected results. The detection could almost certainly use some tweaking and I’ve made some assumptions that probably do not hold well in many circumstances, but we shall see.
4 Likes
I guess you’re tired of answering all these parameter questions :).
I’ll try it on Friday, but am likely busy until then.
1 Like
That made me laugh ![]()
When i started mavfft_isb with mission planner. i get this error :
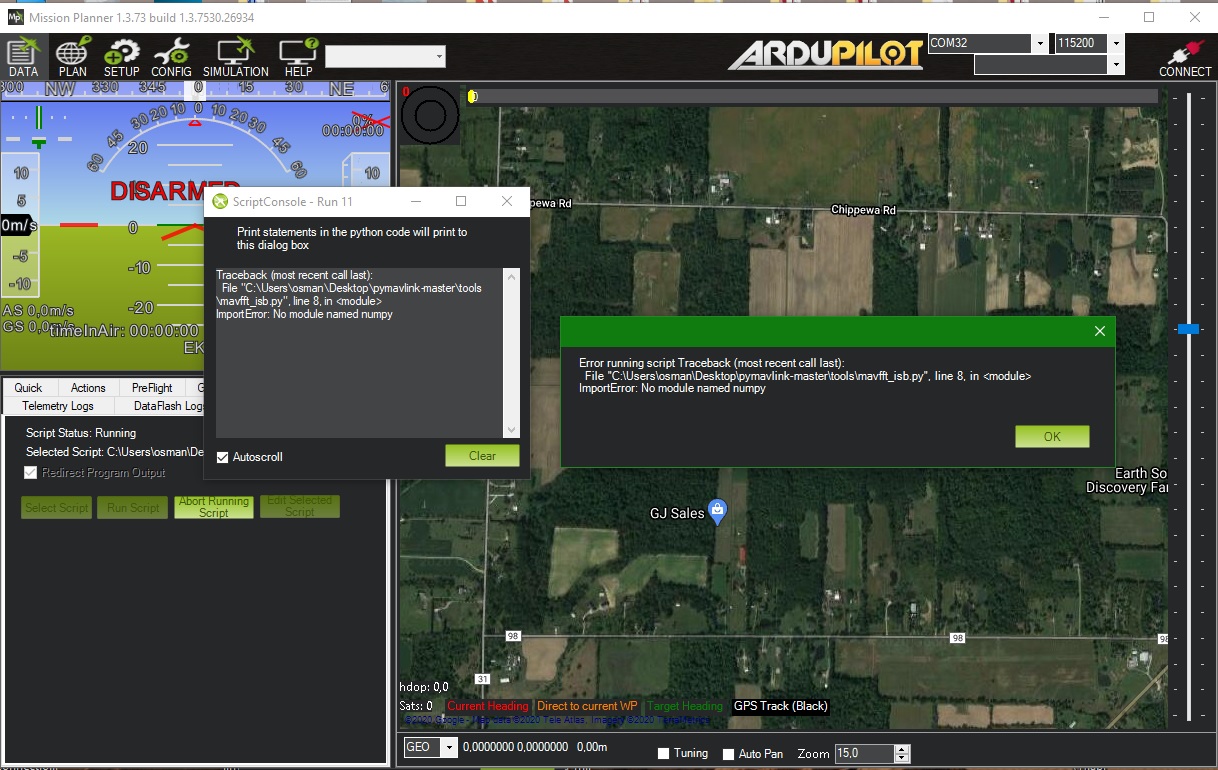
i installed python 2.7 on windows.
How can i import numpy at mission planner ?
Install numpy using pip?
pip install numpy
Yes i did with windows cmd but same error.
Then instead of using it from inside mission planner, run it ( mavfft_isb.py ) directly from the command line.
1 Like
@andyp1per tested this on some old log and it seem good to me.
Do you have some hints on how to set INS_HNTCH_* and FFT_* params to better test new features of mavfft_isb?
Excellent! The tool is only really designed to give new users a good starting point when using throttle based notch control. If you are using FFT then the docs are your friend. Did you have anything specific in mind around “hints”?
The problem is may bad english, for FFT_* you clarify in this answer, for INS_HNTCH_* i would like to know if it is better to enable it with values from experience and refine with mavfft_isb output or is better to leave disabled and then use the output from mavfft_isb.