It’s clearly significantly better, but I agree your vibes may actually be too high
So, is there anything else I can do to improve vibes?
And thank you very much for the awsome work!
probably only physical things to further improve vibrations.
Props balanced
Everything secured tightly (no antenna or wires flopping around)
Wires being flexible and not bring any vibrations to the FC.
Flight controller mount.
I will recheck all those things.
Thanks!
Continuing the discussion from Tuning the Harmonic Notch:
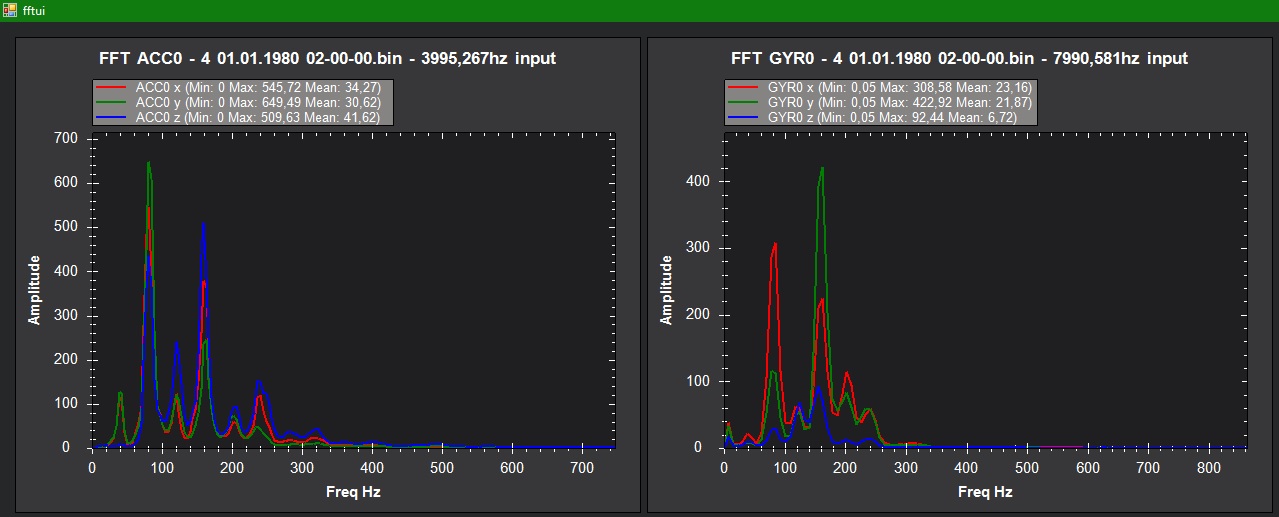
First try with the harmonic notch, this is my much modified F330 with props and motors from an old phantom 1
I’m really pleased with the results, pre-filter flight included some low/medium speed turns but I choose 150Hz for the notch frequency.
Is it worth looking at the peak @ 75Hz?
Log dated 17th is pre filter, 18th is post filter
https://www.dropbox.com/preview/MP%20Logs/2020-08-17%2020-26-14.bin?role=personal
https://www.dropbox.com/preview/MP%20Logs/2020-08-18%2020-21-00.bin?role=personal
Any comment/advice would be great.
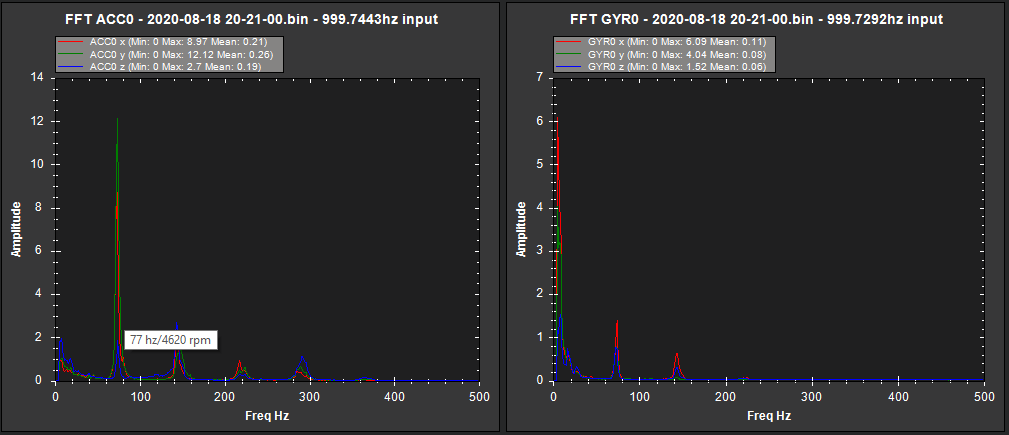
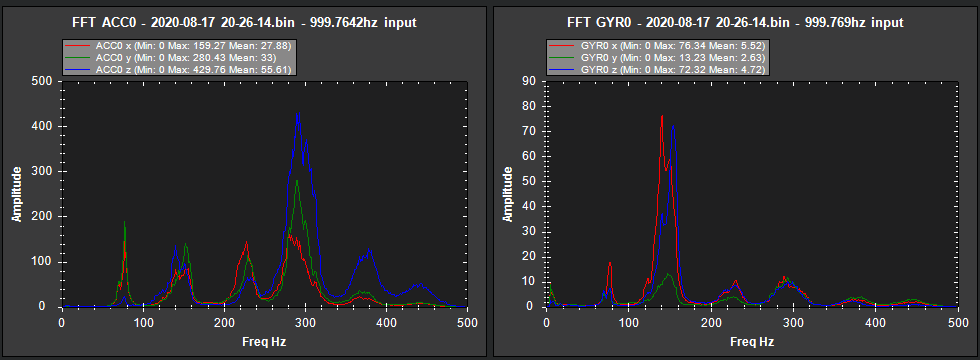
Yes! That will be your primary harmonic and although it looks small some of that is a function of energy increasing with frequency. You will find that it is having a big effect on your control and you should definitely try to squash it.
I’m guessing that my initial flight should have been a more gentle hover?
My first flight since lockdown so got carried away!
So I should set the notch @ 77Hz (the fundamental?)
Could you explain energy increasing with frequency?
I’m fairly familiar with harmonics in radio transmitters and they are usually smaller than the fundamental.
Thanks
I’m only speaking from experience here - I’m not quite sure what the physics is, but basically larger copters often have a second harmonic that is much larger than the fundamental. This effect is most pronounced on helis. However, just because the fundamental appears small does not mean it is ignorable - on my Y6B the fundamental is the most important to squash even though it is not the largest / highest energy peak. I suspect this is partly because its frequency is much closer to the control frequencies and the LPF cutoff.
That makes sense, I hadn’t considered a relatively low level fundamental could excite larger harmonics. I’ll reconfigure the notch for the fundamental and try again.
Thanks
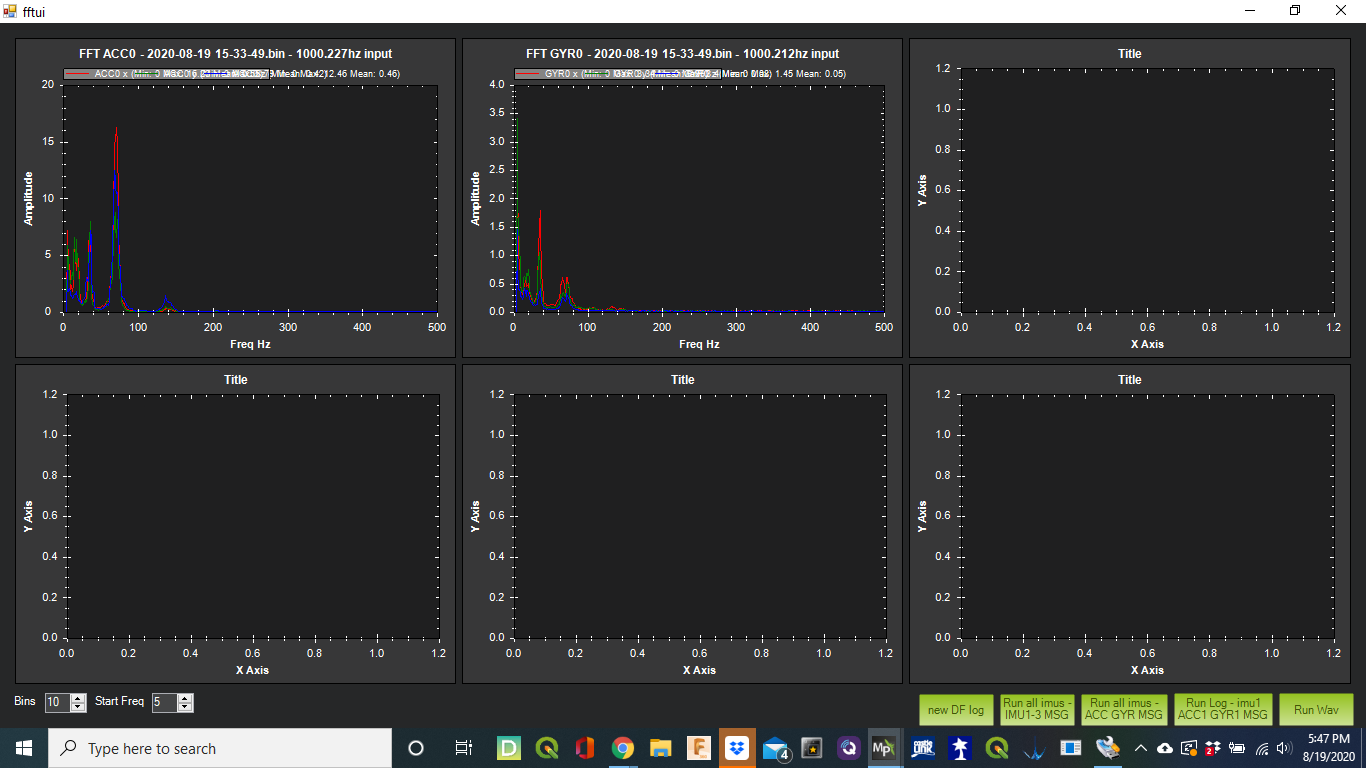
Hi Andy. I would appreciate if you can take a look at my settings and comment back to see if I am getting this all correct and the best I can possibly get it. Thank you.
Copter is a hexacopter with 100kv motors, 30" props and I use it for spraying. I did these flights in alt hold with no extra weight or product. One of the things I am struggling with is finding the exact hover frequency. When I put my curser on the peak of the gyro screen I get different frequency’s as I move the curser up and down the peak like the pre-filter attachment below and it looks like 67- 74. Is there a good way of finding the best hover frequency by moving the curser or should I just look at it and make my best guess? I have a throttle based setup.
Here are my settings that I came up with:
ins_hntch_mode= 1
ins_hntch_ref= .206
ins_hntch_freq= 68
ins_hntch_bw= 34
ins_hntch_att= 40
I then I had a hard time with figuring out the min_freq which looks pretty low like 20, but I tried this a couple of months ago and you mentioned do not go that low and use 40. So I used 40 and came up with .157994 for the new ins_hntch_ref. Is this correct? Can I do better with numbers or another notch? I have worked hard on getting on the vibes out of it. Thank you so much!
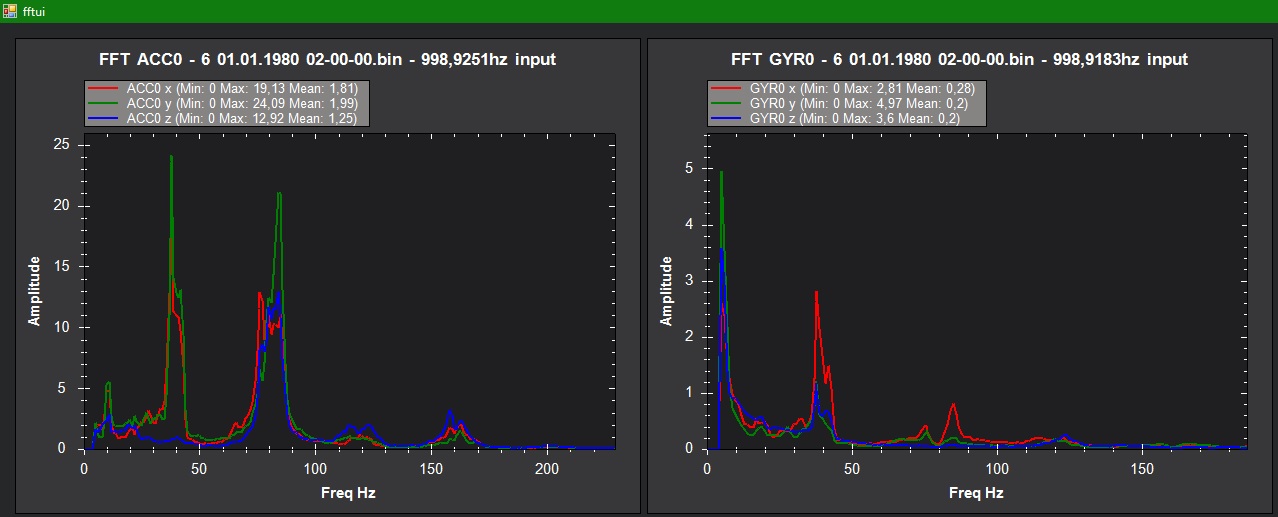
Pre-Filter

Post Filter
This looks to me like you have harmonics at 35/70/105/140 - which would make sense given the size of your copter. You could try going for the lowest - 35Hz and 17Hz bandwidth and see whether that addresses the higher ones. We limit the number of harmonics you can use to 3 so its possible that may not work since your largest are 2 and 4 - you would have to experiment.
@andyp1per
Ok, thank you. Would I keep all the other numbers the same and what would be my low_freq? I thought I read going to low might lose control of the copter.
Would I set them this way:
ins_hntch_ref= .206
ins_hntch_freq= 35
ins_hntch_bw= 17
ins_hntch_att= 40
To set the new ins_hntch_ref, I am not sure what my low_freq would be?
You have a large copter - the larger the copter the slower the props turn and the more inertia it tends to have meaning that it only needs slower more gradual changes in attitude control - thus filters can be lower etc. So for this size of copter its probably ok. If you are concerned then start with a really narrow bandwidth - say 10hz - and go from there. The other settings look fine.
Hi Andy,
I think I’m on the right track now 
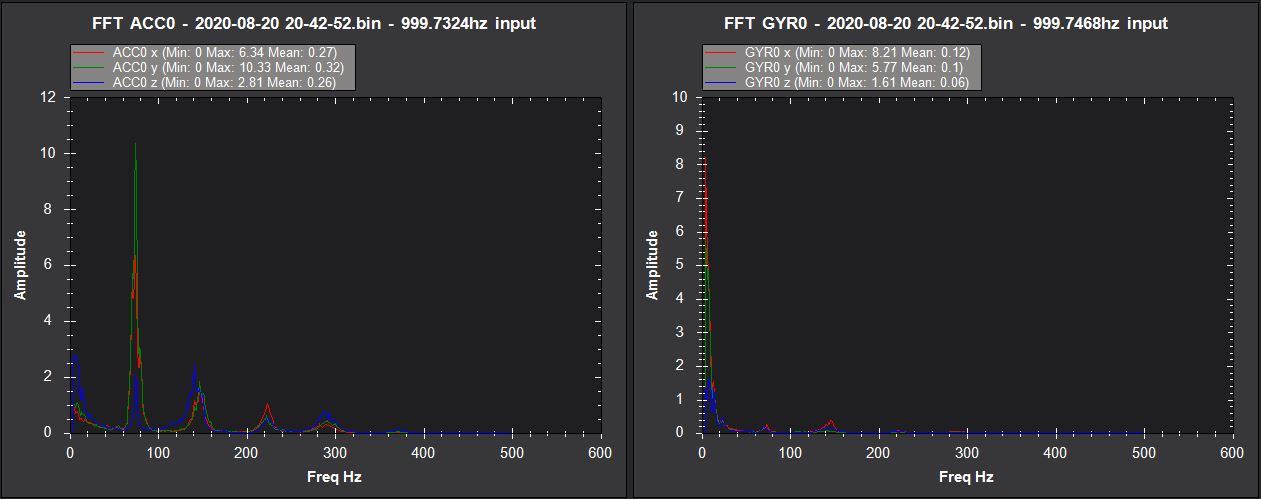
Log for the ‘hover’ flight:
Log for a more aggressive flight:
I did change the ref frequency slightly, should be nearer the actual figure now.
What do you think?
Thanks
Colin
Looks good. If you got the ref right then the FFT should stay low in dynamic flight as well.
Hello @andyp1per. Thank you for excellent topic.
Can you help me about big octo frame with 28inch prop.
Do i need to set double notch option for big copter.
you said set 1 for double notch but ardupilot document says different.
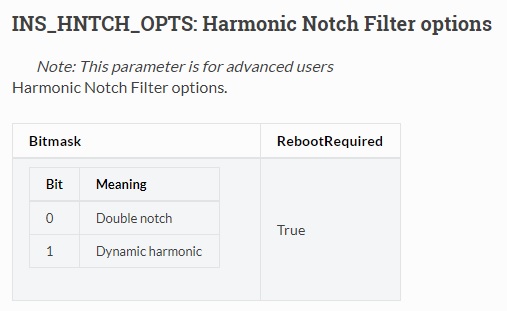
INS_HNTCH_OPTIONS : 1
which one is correct ?
Lastly, i didnt find out issue that ;
if i dont set “INS_HNTCH_ENABLE: 1” , i can not see other INS_HNTCH parameters.
in ardupilot documents , to collect gyro and acc log values before FFT analyze for getting HZ freq, you need to first set INS_LOG_BAT_MASK = 1( to collect data from the first IMU) and INS_LOG_BAT_OPT = 0 before notch filter process.
But if i set INS_HNTCH_ENABLE, i can not get correct HNTCH_FREQ value before notch filter. right ?
how can i make first analyze to set notch filter ?
INS_HNTCH_OPTIONS is a bitmask, so bit 0 ==1, bit1 ==2
You can get a reasonable FFT without the notch enabled - but you will want to iterate, try and get it roughly right to start with and then do another hover to try and pin it down more precisely
1 Like
Oh sorry i see now .
okay first, i will not set INS_LOG_BAT_MASK = 1 before static notch setting.
Would it be better to adjust that setting " INS_HNTCH_OPTIONS : 1" for 28 inch copter ?
There is no right answer - you would have to experiment
Hello again @andyp1per . I will be grateful if you can evaluate my logs. I am waiting for your kindly advices 
Frame : OCTO Coaxial
Prop : 28 inch
Total weight : 18 kg
thrust hover : 0.237141
Hover time : 30 seconds
Here are my parameters :
INS_HNTCH_ENABLE 1
INS_HNTCH_ATT 40
INS_HNTCH_BW 54
INS_HNTCH_FREQ 81
INS_HNTCH_HMNCS 3
INS_HNTCH_MODE 1
INS_HNTCH_REF 0
INS_LOG_BAT_MASK 1
INS_LOG_BAT_OPT 1 (for post-flight changed to 2)
INS_HNTCH_OPTS (I couldnt find in parameters)
INS_NOTCH_ENABLE 0
Pre Flight :
https://drive.google.com/file/d/1zrwIVNyQ-Y_gtIP7A_goJf0v3wdUVcq_/view?usp=sharing
Post Flight :
https://drive.google.com/file/d/14FJ_HLqTZlrGp0sCcM3lZQZl0OoQ_qIq/view?usp=sharing
Thank you…