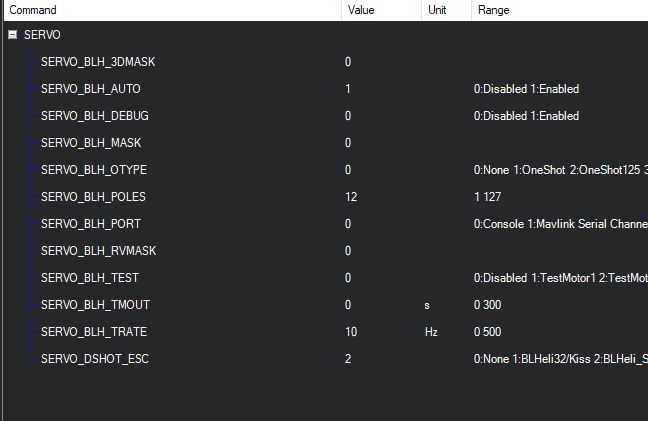
For DSHOT to be effective you need to use the AUX outputs for motors, not the Main outputs.
I would advise to use the bi-directional DSHOT firmware, then set the HNOTCH to use ESC RPM data:
INS_HNTCH_MODE,3
The params I recommend below can still be used if you get DSHOT working.
Look for a message in MissionPlanner Messages like: RCOut: PWM:1-8 DS600:9-14
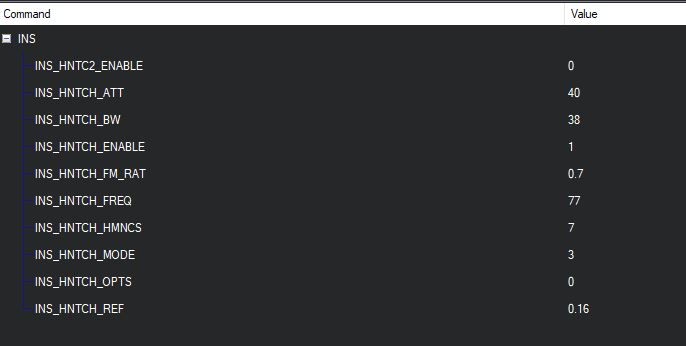
With the existing config, set these:
INS_HNTCH_REF,0.16
INS_HNTCH_FREQ,77
INS_HNTCH_BW,38
IINS_HNTCH_OPTS,0
INS_HNTCH_HMNCS,7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Please also set
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
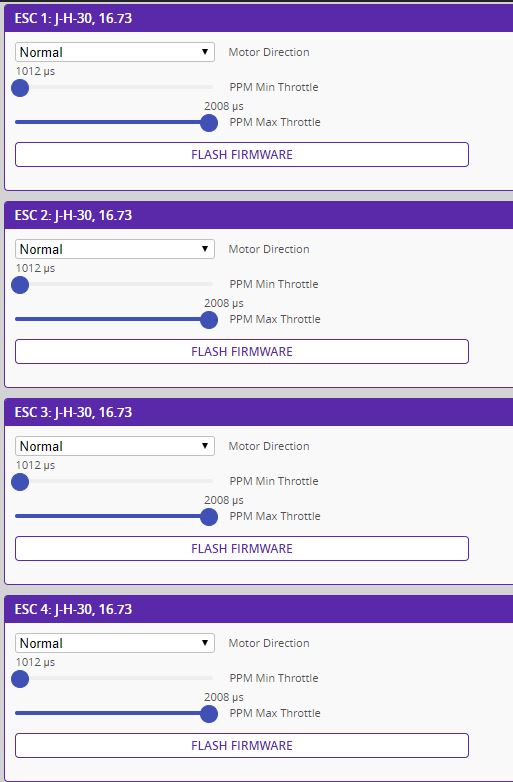
JazzMaverick BLHeli_S firmware flashing old ver J-H-30, 16.7
motor pin move to main pwm to aux just setting changes servo output 9,10,11,12 motor selection
BRD_PWM_COUNT not showing SERVO_GPIO_MASK = 0 motor aux work
@dkemxr last work changes
965 topic
after facing problem
next all change default normal
sd card format ,install plane firmware and again install copter firmware,blheli firmware default, motor output pwm . notch disable
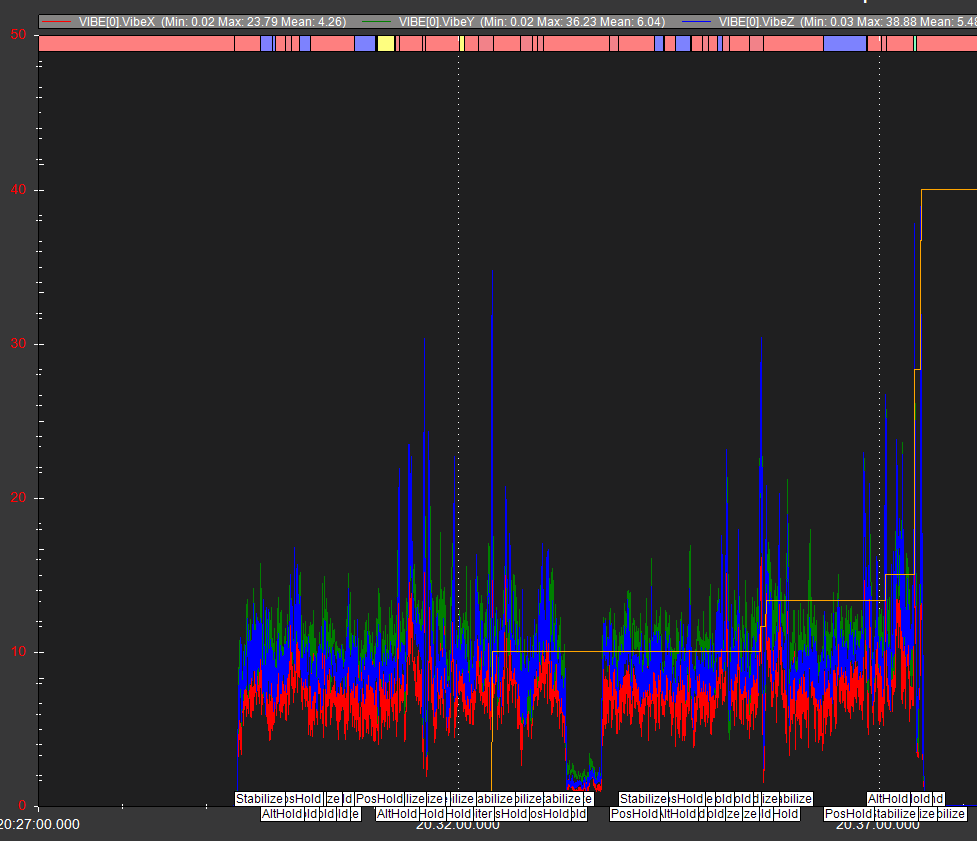
There is definitely high vibrations and your flight controller (IMU) is sensitive to these levels.
I would say you need vibration values below 15, it looks like every time it goes over 20 you have trouble.
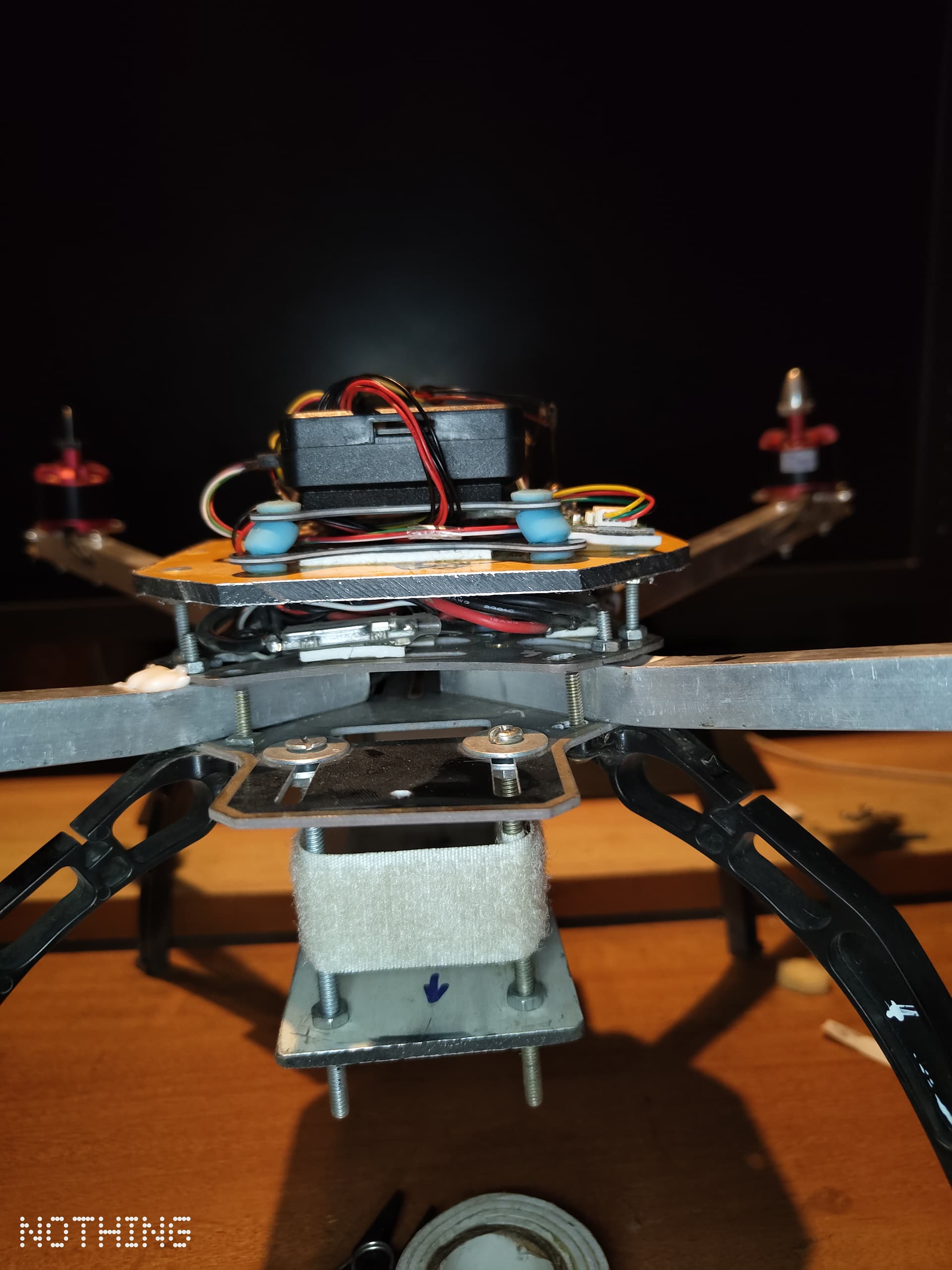
No amount of software filters will fix this - you need to do more to reduce the physical vibrations or isolate the flight controller.
So try doing all the mandatory calibrations again, go outside and wait for a good GPS 3D Fix before doing the compass calibrations.
Or get a new flight controller.
today fly after all reset default all tuning setting default but same issue only stabilize mode work
poshold,althold,land mode going high vibration after roll/pinch rc input
Foam tape is insufficient for this craft, you need something much more compliant like a ball mount. Even Zeal Gel would probably not work but you could try it.
My 2cents…years ago we used a hex copter where clearance between props tips was 1" or less… it was horrible to land and would eratically move up and down as it neared ground…it is partially why i started building my own copters…my designs are all run through ecalcs…the x8 and quads are all ±18" square to motor center with 12 1/2 to 13 inch props… ecalcs flags a couple of these because they miss clearance by 1/2" or less… i.e. they all have 5" or more between prop tips…i have yet to see any of them have issues with ground effect… not sure the reasoning… or if this has an effect…but with the help of this community all 4 of my uavs are still flying with no major issue to date
There is a bit of spread to the frequencies though because you have some sort of weight or yaw imbalance causing motors to run at all significantly different RPM. Best tp carefully check your motor alignment.
To use throttle-based notch you would
FFT_ENABLE,0
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.224
INS_HNTCH_FREQ,74
INS_HNTCH_BW,40
INS_HNTCH_FM_RAT,0.7
Looking at the second log “13 fft off”, the result is the same - you would use the same throttle-based HNOTCH settings.
The broad spread of frequencies is still there, so definitely look at the motor mounts and alignment.
If you can fix that you would be able to refine INS_HNTCH_FREQ and INS_HNTCH_BW
No matter which HNOTCH method you choose, set this in all cases INS_ACCEL_FILTER,10 (I see you did this in the second log)