There are further improvements in 4.1 that will reduce the noise further, but setting the TRATE to 100Hz is a good start. I could not get it usefully above this - too many errors.
Beware, if your noise is low then 2.0 AGGR will overcook it - this happened to me and I started to get pitch oscillations on a 4" quad.
Why would the copter sound quieter with the trate increased. Is this having an affect on the way the Notch filter works.
Also I assume this autotune aggression number is in the 4.1 version.
The autotune number works in any version AFAIK. It’ll say it’s out of range, but it works fine.
Increased trate means that the filter is updating 10x faster than it was from my understanding.
@andyp1per I had a really strange thing happen today where all four motors cut, and the ESC stopped sending telem. I doubt its filter related, but I’ve never had anything like it happen before, and it was after increasing the trate. Here’s the post with more info.
@andyp1per Hi Andy,
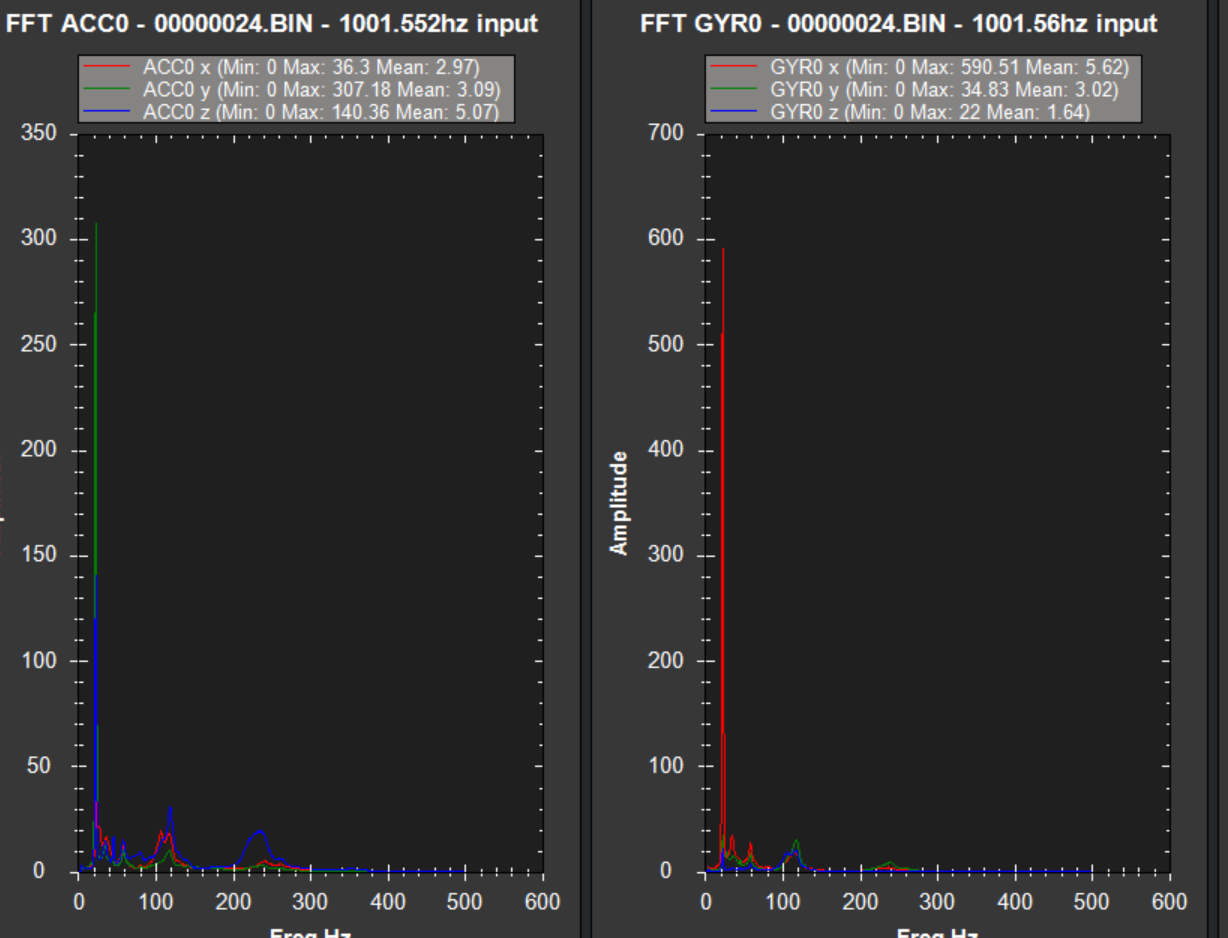
I have a big copter(115cm frame, hobbwing x6 motor, 2388 props), tuning right now, So I check the FFT log and It’s noise freq is around 20hz, Is that normal? and the RATE, RCOU1-4, ATT, is full of noise.
You should probably do a bench test where you switch on BLH debug and see how many errors you get. I you are getting a lot then the TRATE is probably too high.
Not sure why the ESCs would cut out but we had DMA priority issues on the Kakute boards with Dshot. What board is this?
The peaks at 110Hz and 220Hz indicate that your first harmonic is different to 20Hz. More likely I would say 65Hz - in which case the 20Hz spike is weird - maybe just frame resonance.
At higher TRATE the notch will track the noise more accurately, with less noise you get less corrections for the noise and hence less motor fluctuations.
Yeah, but note, I am doing this on small high kv motors that will accept rapid changes of input quite readily. I worry than on larger, lower kv motors you may be stressing the motors or ESC’s - @vosair I wonder whether this was behind your temperature issues. Might be worth dropping the TRATE to 50.
My guess is that setting the TRATE to the same as your INS_GYRO_FILTER value is probably a reasonable thing to do.
Hey @andyp1per
I never upped my Trate on any of my machines. Honestly had no idea it existed. Also was not going to up it more then 20 percent anyway. My INS_GYRO_FILTER is set to 26 and right now the Trate is 10.
But hey if you think there is no value. I can leave it right now. I have other issues to resolve.
Hi,
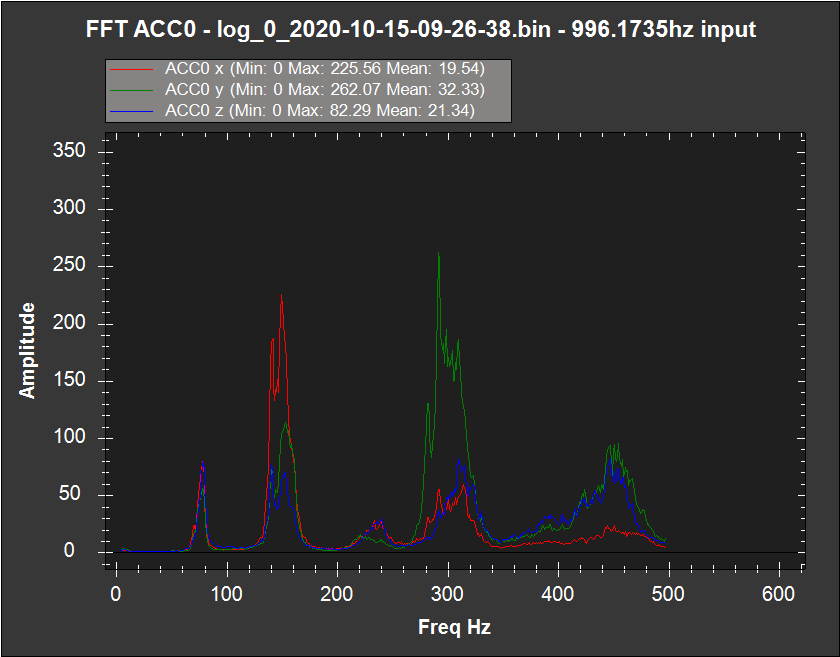
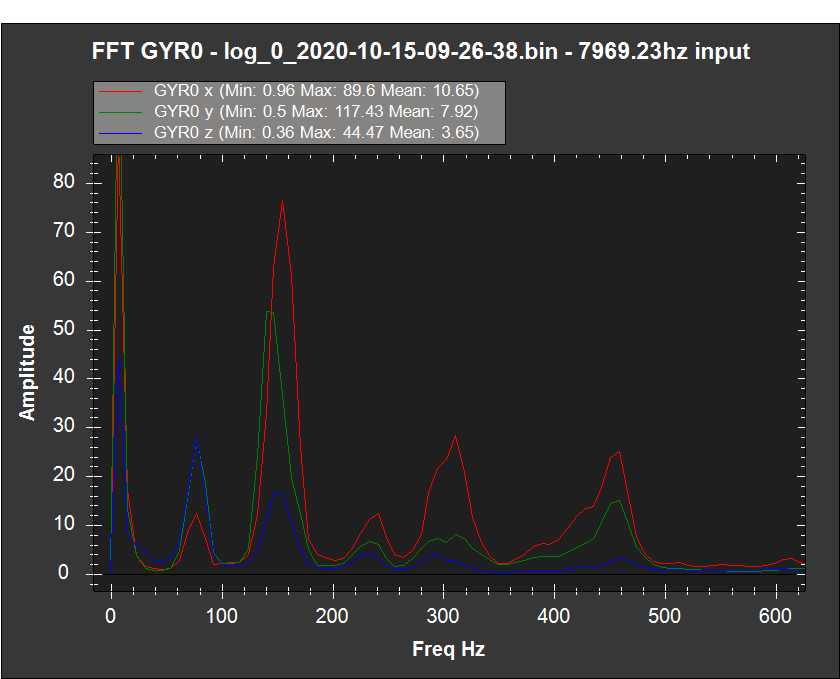
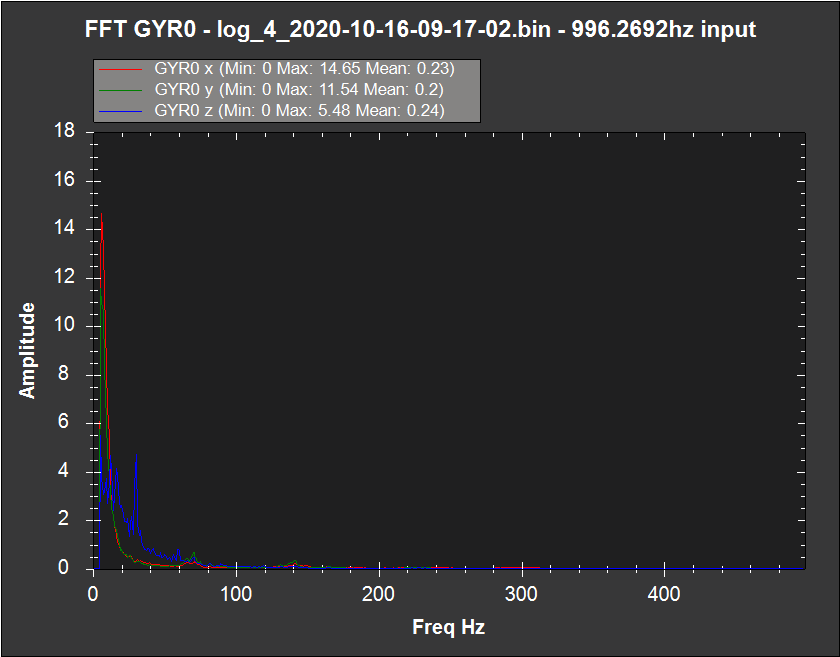
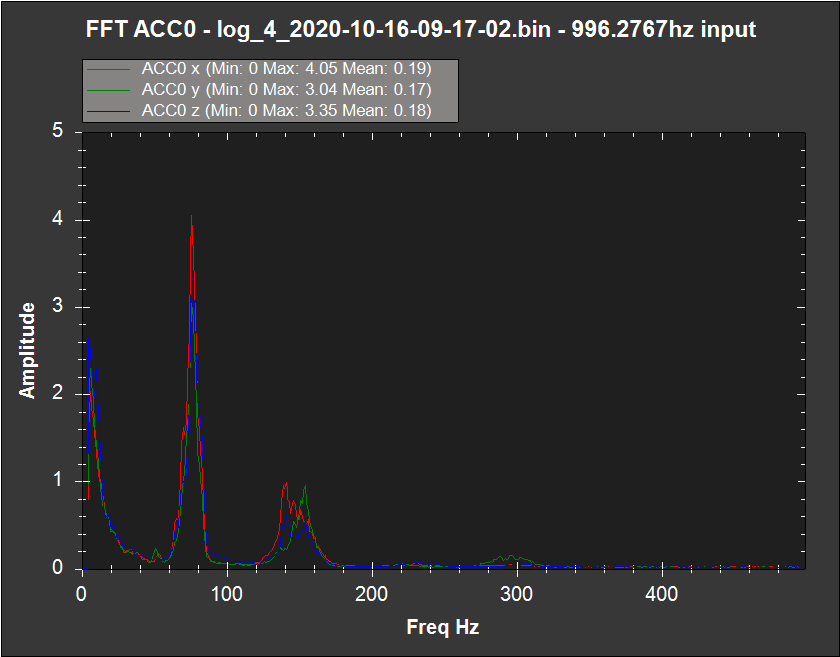
Have tried to activate the notch filter on my 10" prop quad, attached is before and after. Should I consider this good enough or are there tweaks that I should consider?
My parameters are:
INS_HNTCH_ATT 15.00
INS_HNTCH_BW 39.00
INS_HNTCH_FREQ 78.00
INS_HNTCH_HMNCS 3
INS_HNTCH_MODE 1
INS_HNTCH_OPTS 1
INS_HNTCH_REF 0.318