the filters were on and i have done a flight post roll and pitch autotune. made a log in loiter mode with lot of direction motion.
please have a look, appologies for the size of the log since i didnt change the log bitmask
the filters were on and i have done a flight post roll and pitch autotune. made a log in loiter mode with lot of direction motion.
please have a look, appologies for the size of the log since i didnt change the log bitmask
the attitude tunning looks good but the rate outs are spiking at times
Pitch attitude control looks quite good, roll is a bit nervous.
Yaw is a lot better now than it was earlier.
All have some oscillation before takeoff - a sure sign that PIDs are probably a bit high and landing gear is a bit wobbly (or even the arms are not quite stiff enough).
I would decrease the Accel Max for pitch and roll and try a flight with some payload
ATC_ACCEL_P_MAX,29900
ATC_ACCEL_R_MAX,19337
That is just taking off 10%. Keep a record of the new post-Autotune values in case you want to put them back.
If you still see those small oscillations I would be tempted to reduce these by 10% too:
ATC_RAT_PIT_D
ATC_RAT_PIT_I
ATC_RAT_PIT_P
ATC_RAT_RLL_D
ATC_RAT_RLL_I
ATC_RAT_RLL_P
Will this help in the rate out that’s spiking at times ?
Reducing those Rate PIDs should help, but reducing those Accel values is related to adding a payload.
instead if this values i have used as per input shaping doc (55kgs/90kgs)=0.61 *ATC_ACCEL_P_ and ATC_ACCEL_r and ATC_ACCEL_y
Yes sure - dont go below 2/3rds (66%) of the Autotuned values - I’ve found the copter will start to lose stability. 61% might be OK, give it a test but have your finger on that Land switch just in case.
Land mode is the quickest way to descend and disarm in most cases.
EDIT: just to be clear, I mean the ACCEL_MAX values - going too low causes instability.
yes did couple of flights but rate out for pitch at times peaks around 0.15±
2nd flight = reduced roll and pitch by 10% (pid)
3rd flight = reduced pitch pids and d term inflight (but got some lag and oscialltion so landed)
4th flight = reduced just p and i term by 10% drone behaved better than 3rd flight but we couldnt test it properly because some malfuntion happened and drone kept going in a direction before going for rtl adn then we took over immidiately, rc in chan 2 for pitch was neutral from pilot end but 1850pwn signal was sent so we are changign the radio for that ..
https://drive.google.com/file/d/1W8Tit_VISrR9f7vVAddUTld2yMiK4a84/view?usp=drive_link
jsut input shapping prams changed this was flight flight today no changes in pids, later on we did changes in pids as mentioned above
i am reducing in the pitch axis to get the rate out p within the 0.1 lower limit any other thing that i can do ?? atc_ang_pit_p should i reduce this ?? @amilcarlucas
Do one change after the other, not all at once.
yes right now will reduce the atc rat pit p,i,d in one flight and then check for rate out prams.
if not good then will reduce the ATC_ANG_PIT_P
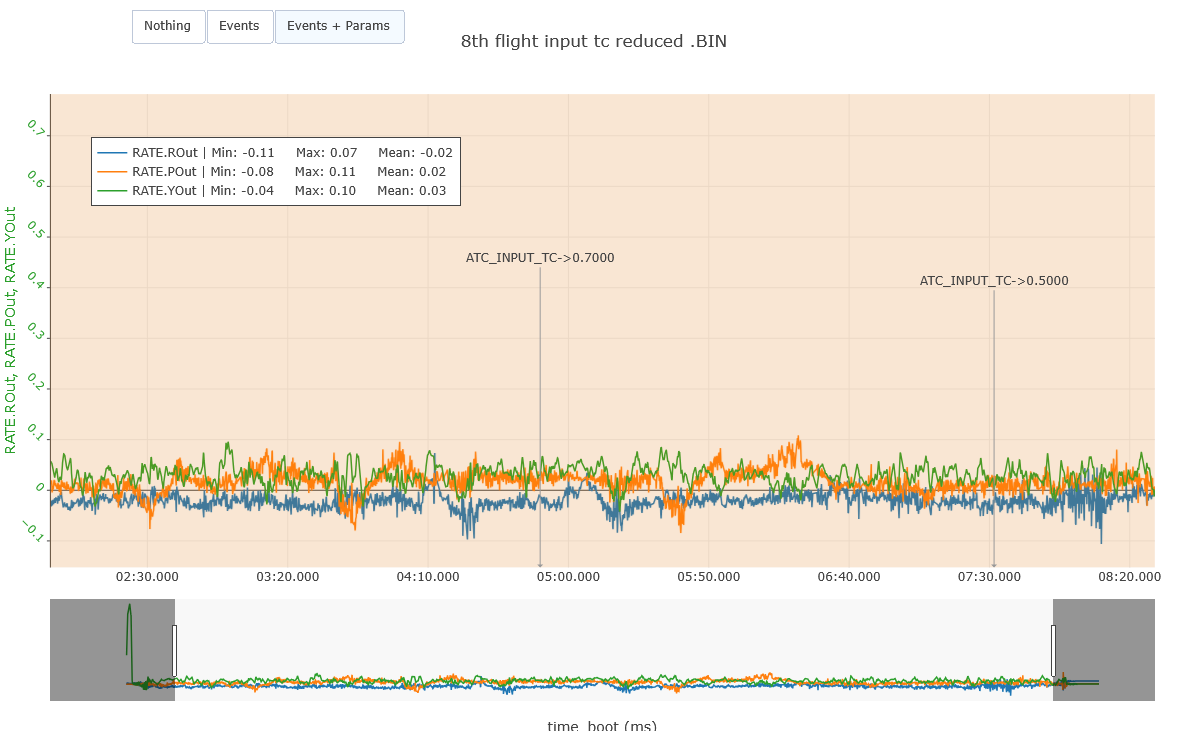
so we changed the atc_input_tc from 0.2 to 0.5.. and the rate out for p has got better and below 0.1… even the pids forpitch were changed.
atttitude control looks good
log-
@xfacta @amilcarlucas so the rate outs have reduced finally wihtout oscialltion and other issues even when this huge copter is moving at 10m/s
had incresed the atc input tc to 0.7 and then there was a spike in rate out p and was very slugish. back to 0.5 and everything is in limit.
motor 1 is working more than other but that could be due to the windy conditions right now..
we did some flights today for endurance test attaching the logs, also attacting the final zip folder of amc