i am facing few issues before i can proceed to next step of magfit. because drone isn’t in a good tune condition to do a auto mission
1- my motors are very hot at min takeoff weight of 58kgs
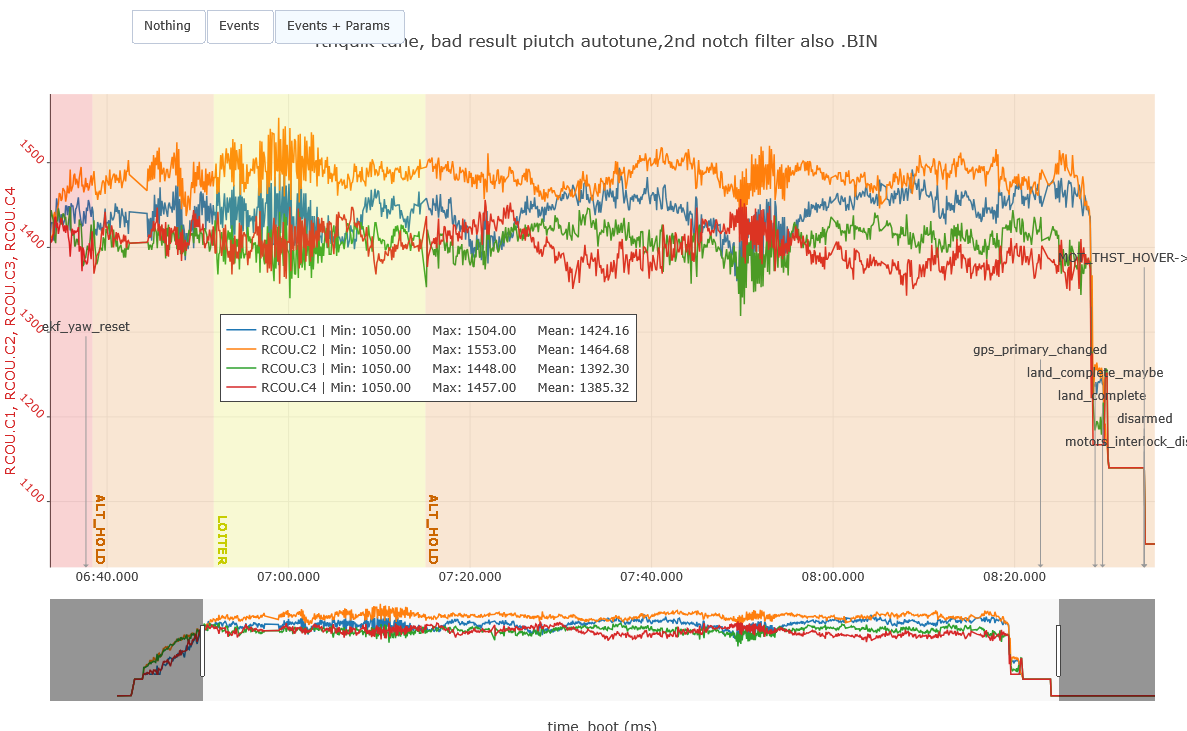
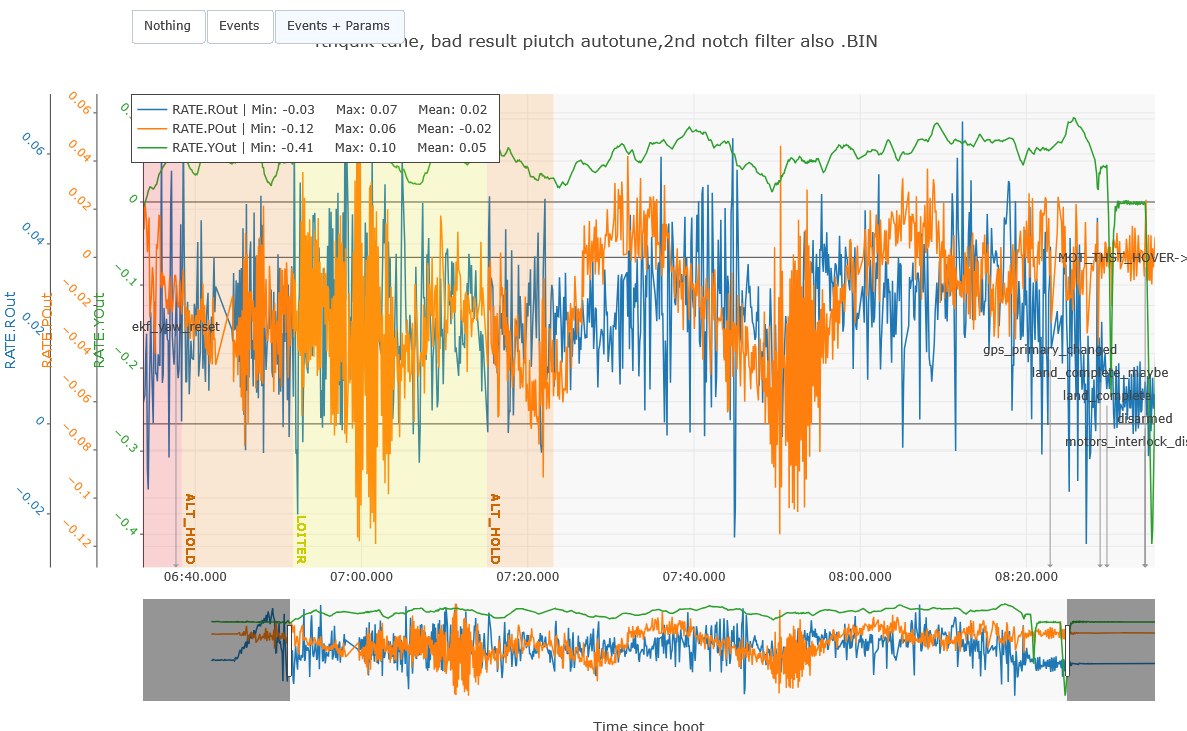
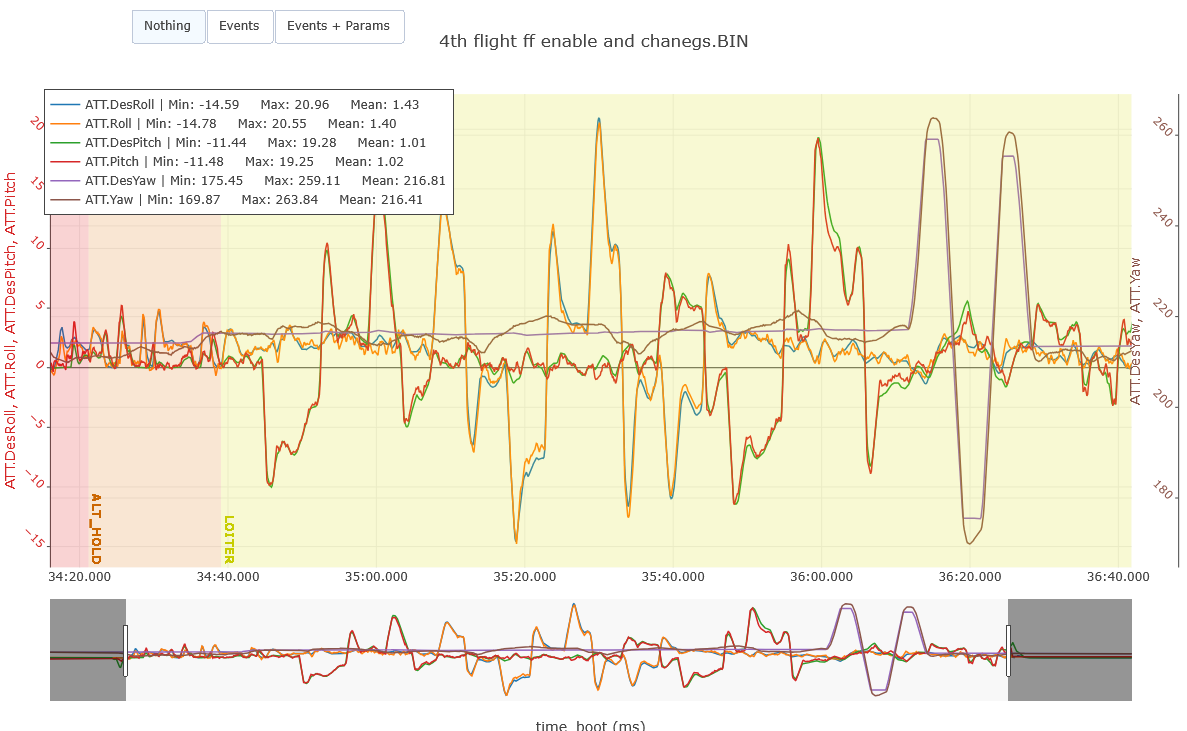
2- post quicktune, in loiter mode when the drone stops there is oscillation.
3- i have noticed in the logs and during flying the drone keeps trying to yaw to one side.
4- yaw imbalance is there but all motors are level, i feel the angle on the arms is the reason for the imbalance.
i am attaching amc software flies. request dev to help me out. @amilcarlucas thanks for your software makes life quiet easy.
i am attaching amc zip file and logs post flight in the drive. could you help me out to fiure out reasons for the issues like
1= drone trying to yaw as per pilot feel and also as shown in logs.
2= oscialltion if there is any , visually there isnt any but in logs pictures shared above you would have a better expertise
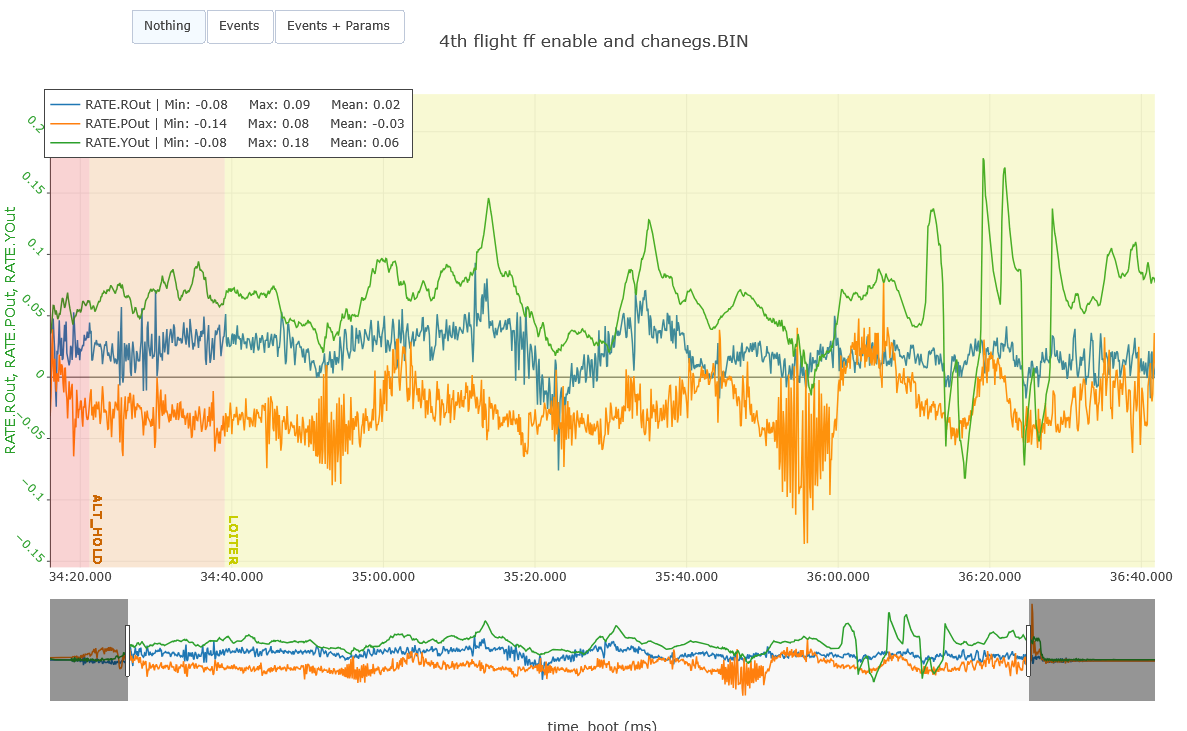
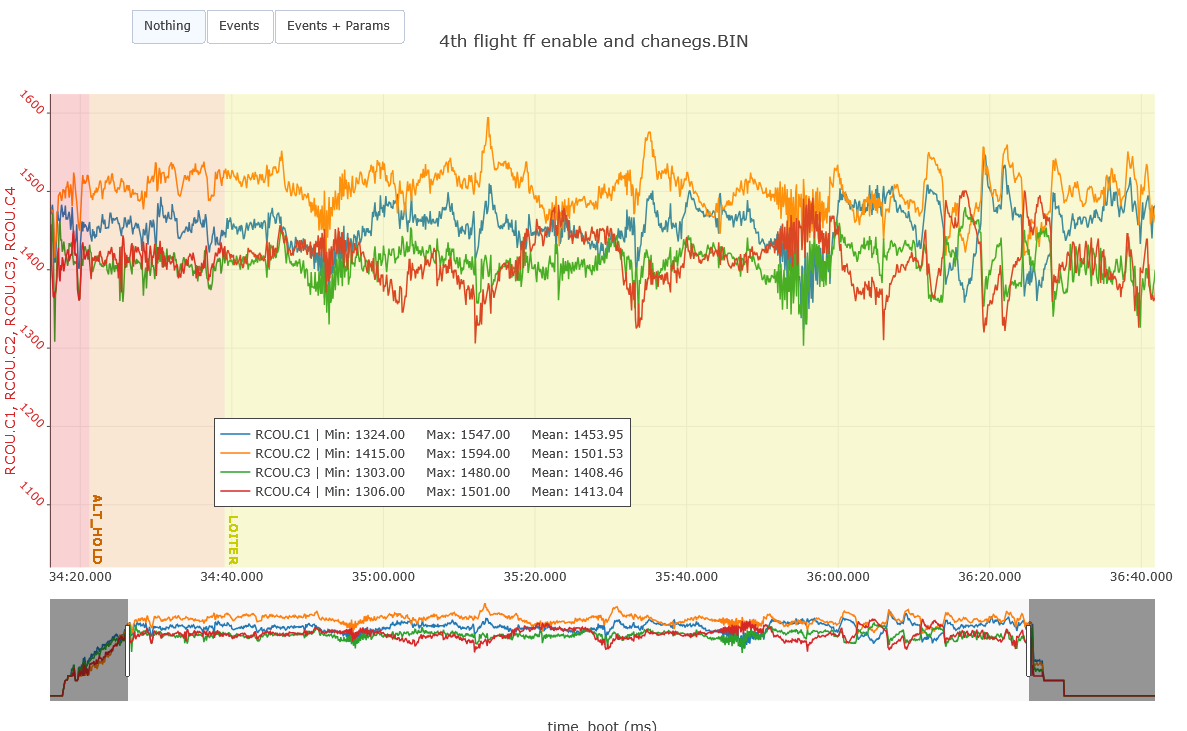
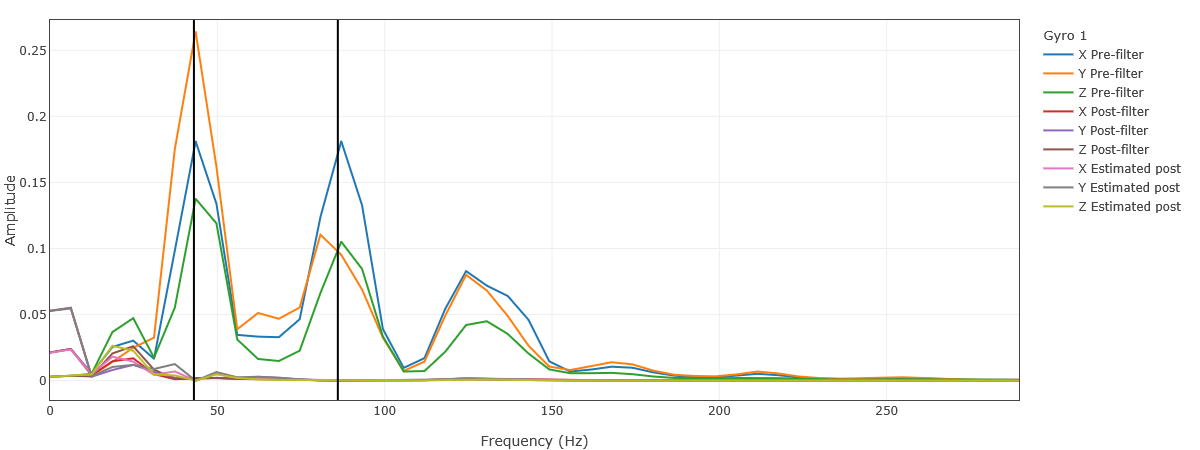
So we followed the amc @amilcarlucas and finished till autotune in all axis, as per our understanding and reading the tune is better, but we are still not sure if we put the right notch filter and if the magfir flight was good.. attaching log annd zip file of the amc
@amilcarlucas if you need to use x13 as template i am fine with it.
@amilcarlucas
Hi could you check the logs , I am not able to fix the hot motor issue I feel , I am not sure if motors are hot or that’s the standard tempura.