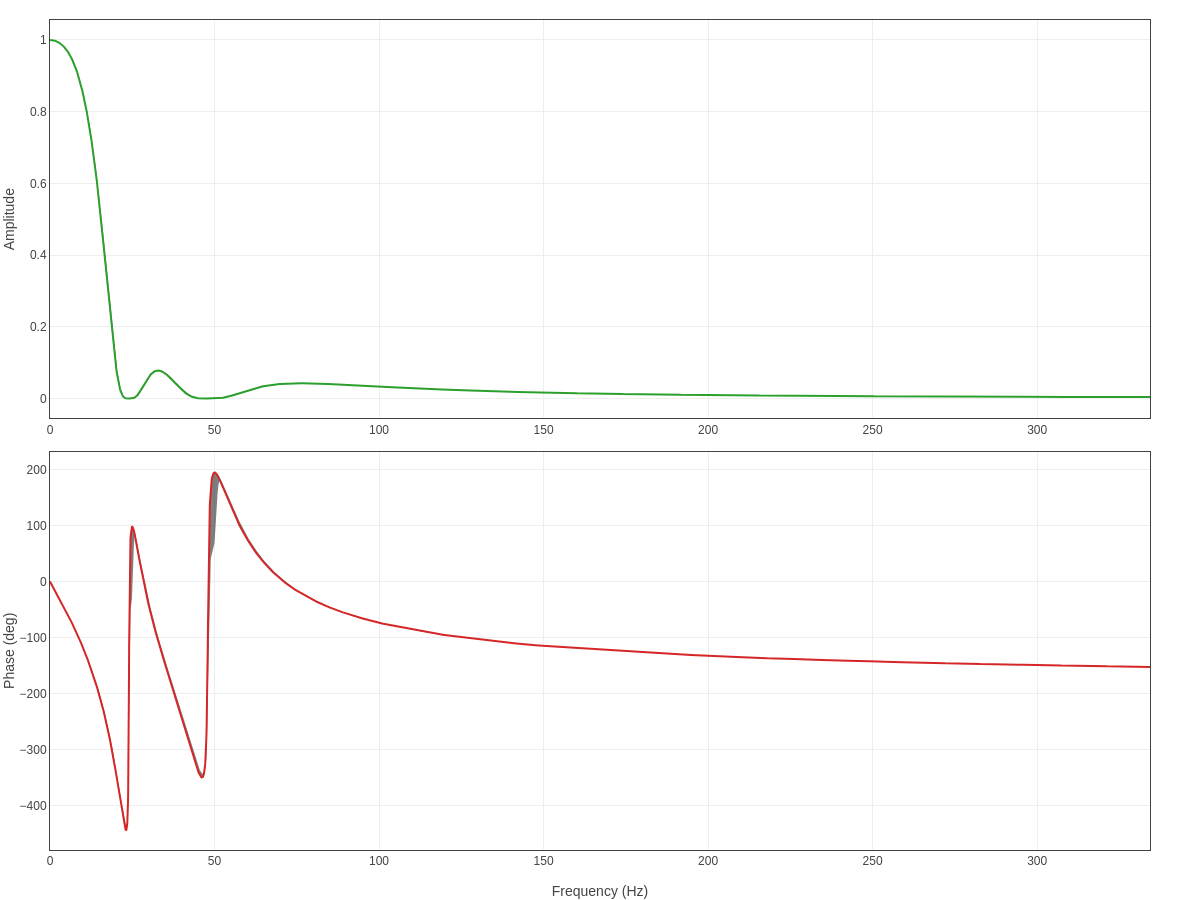
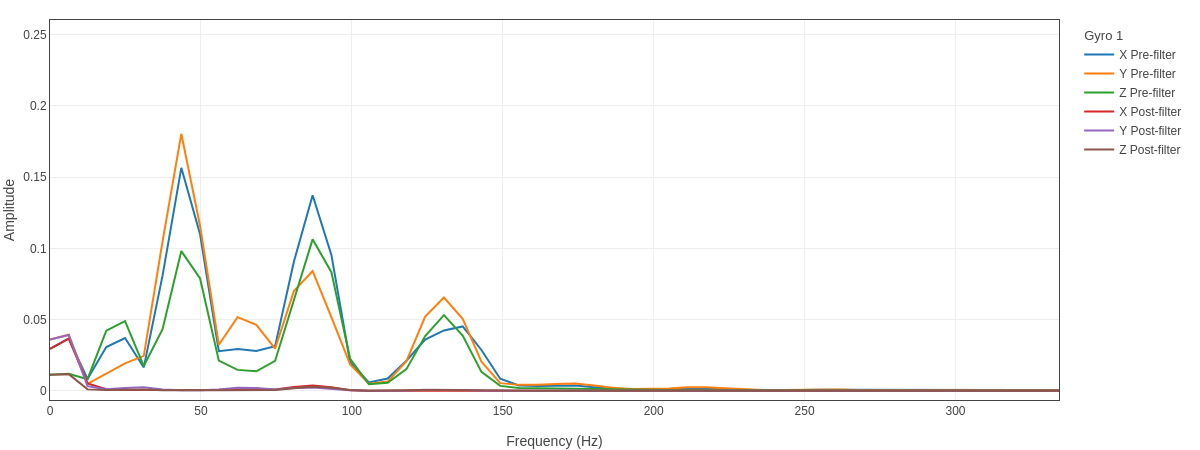
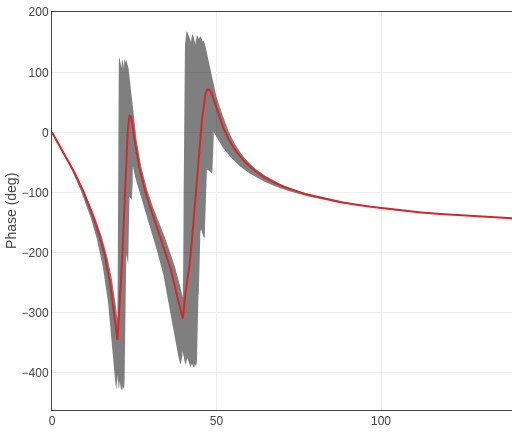
The 1st harmonic, or primary noise from the motors is so low frequency that any notch filter is very close to the Gyro filter and is causing large phase changes.
Use my latest notch filter settings then try pitch and roll autotune. Do a small test flight before hotting Autotune just to make sure everything is OK.
so i shall do a roll and pitch autotune ? and if there is any problem in stability that time then i just land and [quote=“xfacta, post:48, topic:134200”] INS_HNTCH_ENABLE,0
[/quote]
and then takeoff again check stability and if fine then again start autotune for roll and pitch
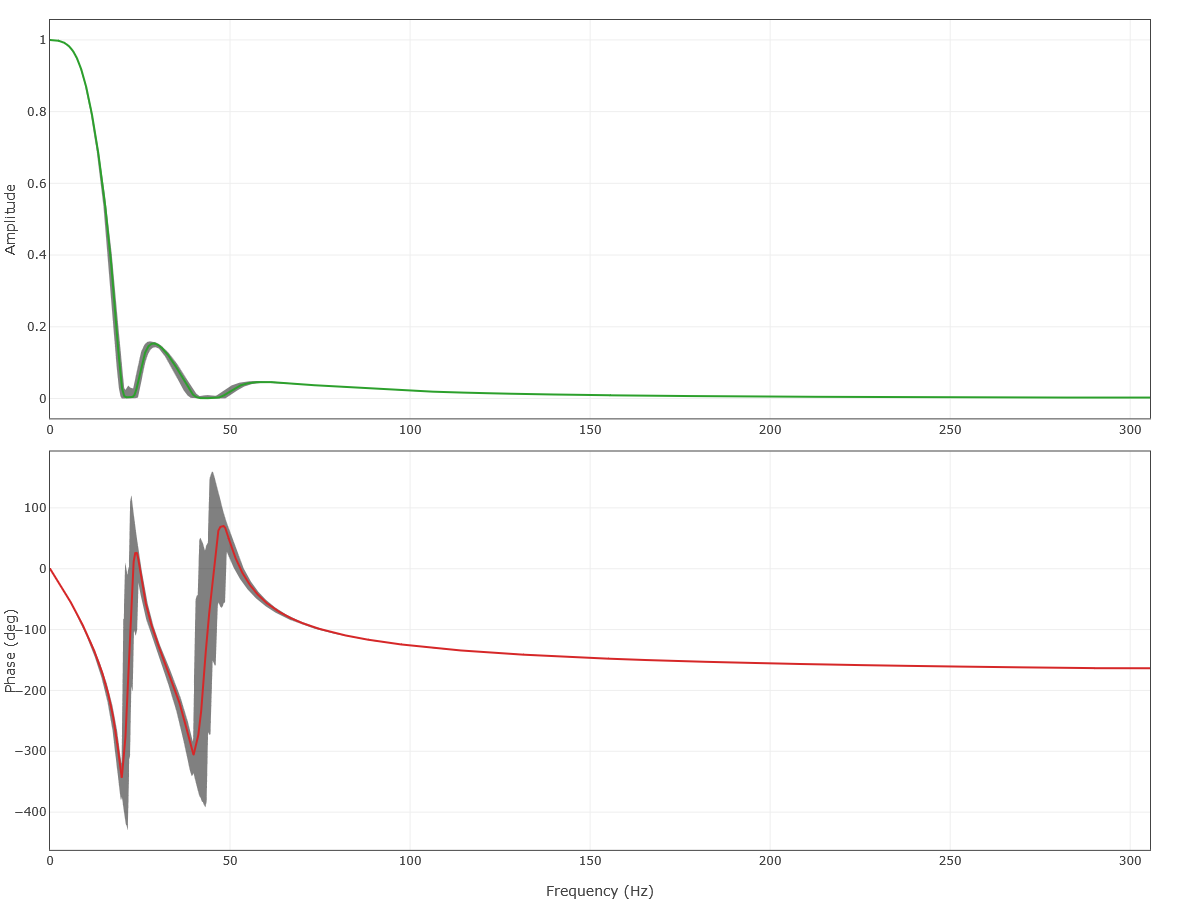
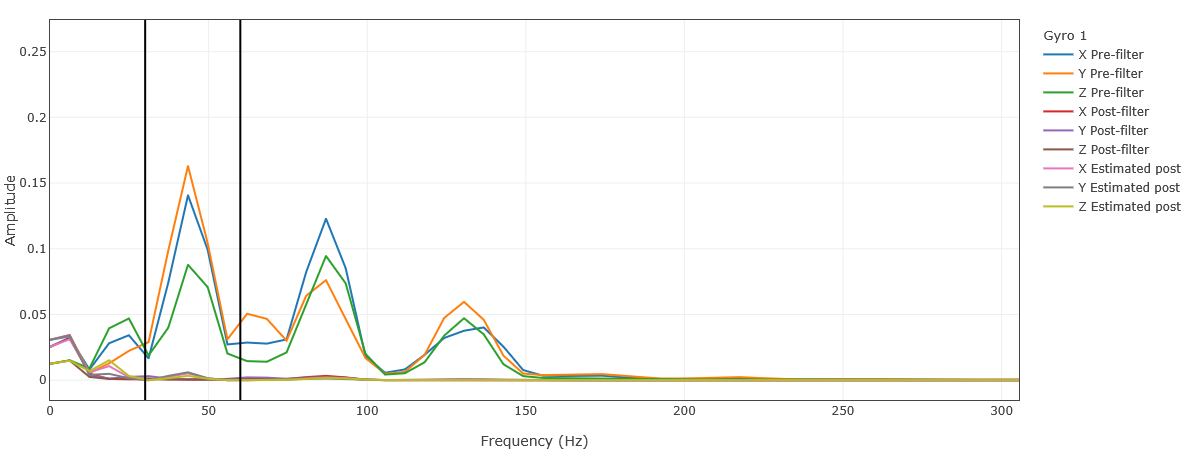
@xfacta The 0.7 FM_RAT reduces the attenuation of the notch filter linearly between 0.7 and 1 of the min frequency, ensuring a non abrupt filtering of the data, but a gradual increase in attenuation.
Wy are you suggesting that it is not meant for ESC telemetry? It makes sense for all RPM sources, as the Noise amplitude also increases with the frequency between 0.7 and 1 of the hover freq.
Yes, or if you notice your pre-Autotune flight is unstable then try INS_HNTCH_ENABLE,0 but the log you sent looks reasonable for pitch and roll. Yaw is still a little poor but that can be sorted out later.
These copters with very big props can be difficult to tune without some payload to make the motors work a bit.
Thanks for pointing that out, I’ve only ever used INS_HNTCH_FM_RAT,1 with ESC telem data.
I just checked these logs and a couple of others - I could not see any noticeable difference between INS_HNTCH_FM_RAT 0.7 or 1.0 , which doesnt mean there isnt a difference somewhere, just that I couldnt see it.
So if 0.7 seems to give more stability then definitely use it.
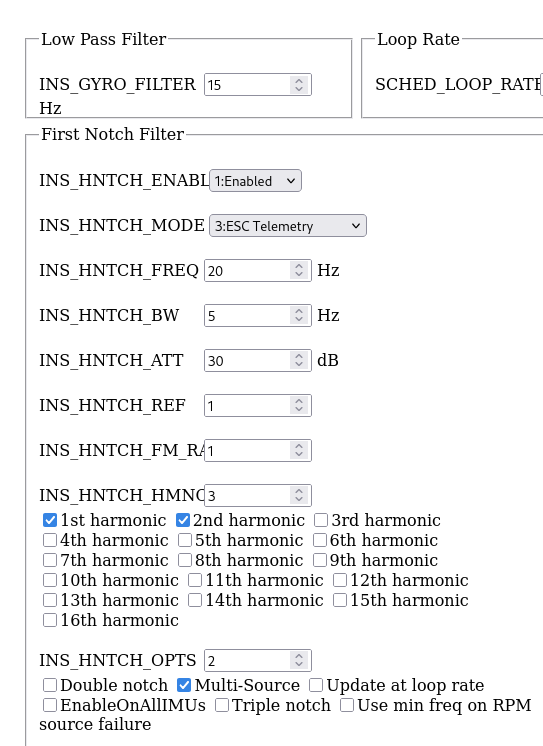
The reason I specified these is because the ESC RPM data will drive up the frequency and bandwidth from these values to whatever is required. If you set them too high, like right at the hover frequency, then the notch filter will never go below that.
Just so you know the reason for those changes