I’m setting up a large-ish (25kg) hexacopter and need the community’s input and assistance to get this tuned and flying autonomous missions. This is the first time I’m setting up a multirotor this big, I’ve previously setup a 7.5kg 850mm build with 22" props, and multiple smaller ones so I’m familiar with the basic process.
I’m facing some issues with attitude control particularly a wobbly position hold (PosHold, not Loiter) and would appreciate a review of the setup so far and inputs on how to proceed towards an Autotune.
Aircraft details
MTOW: 25kg Size: 1600mm motor to motor
Airframe mass (no payload, no batteries): 9kg
Batteries, 4x Tattu 6S 22Ah: 4x2.5 = 10kg
Empty mass (airframe + batteries): 19 kg
After verifying motor & propeller directions, proceeded to fly.
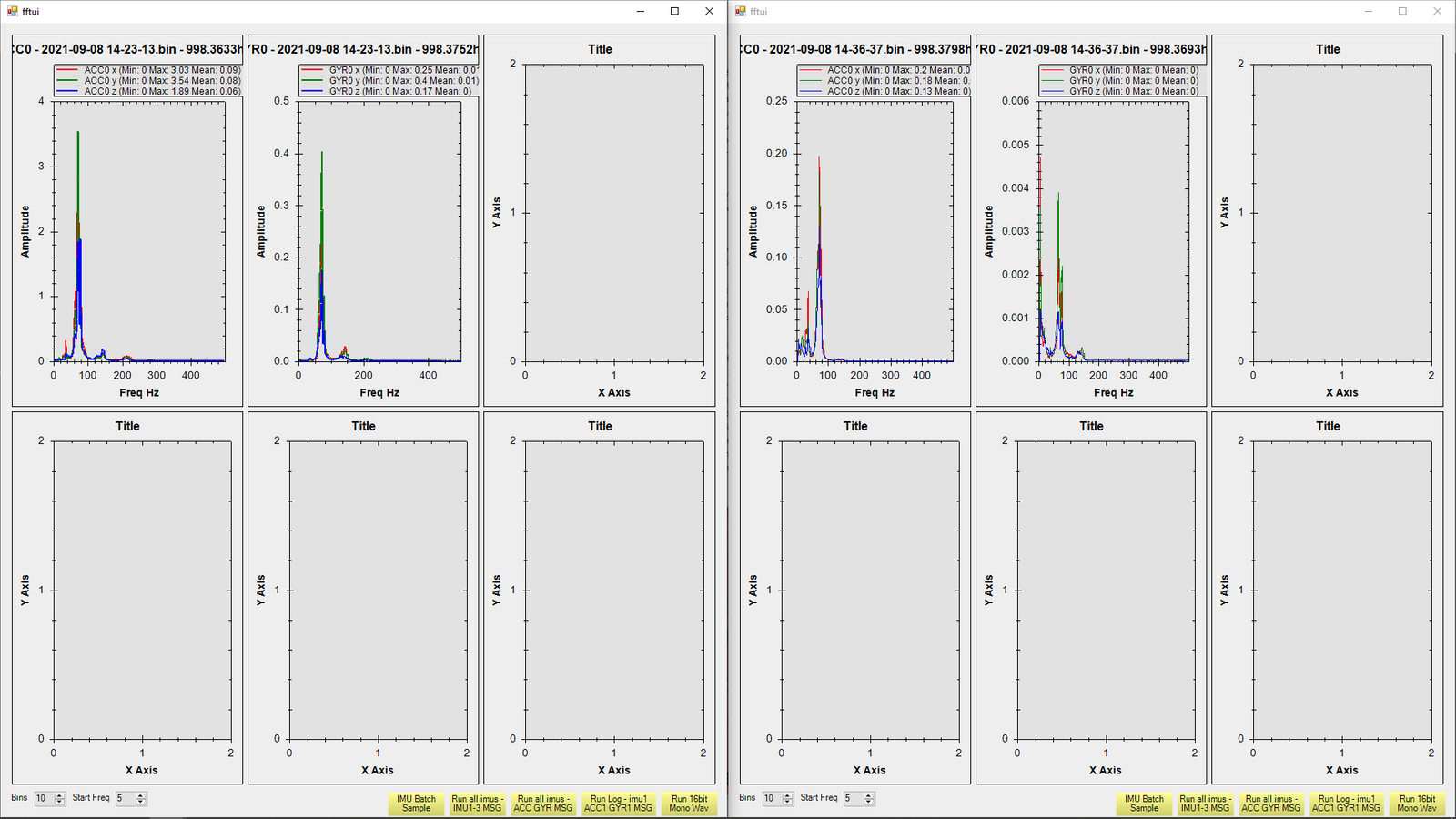
Initially the flight controller was hard-mounted. After looking at the vibes, soft-mounted the flight controller and noticed a reduction in vibes, and that’s how it’s mounted currently.
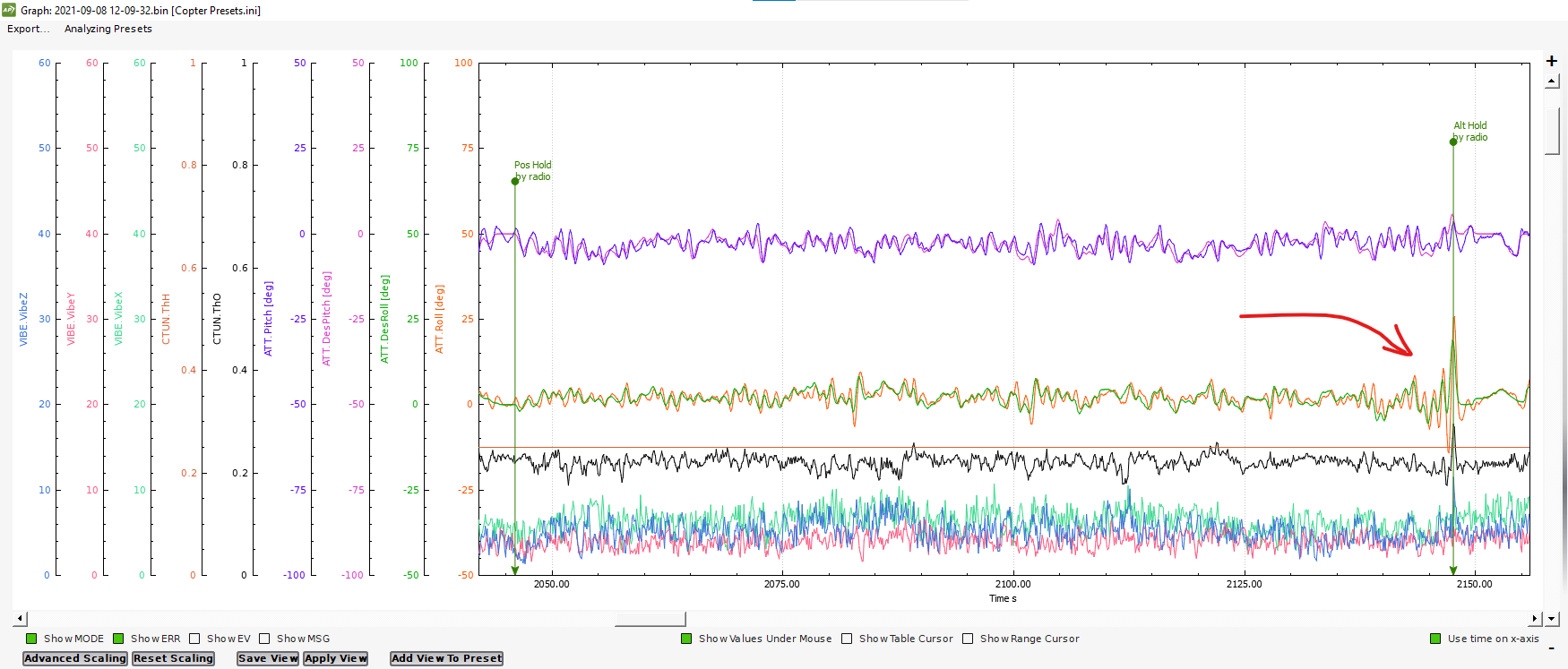
CTUN.ThO increased to ~0.3 and I could feel it wasn’t as sketchy as before, so decided to proceed with some manual tuning to try and address the overshoot.
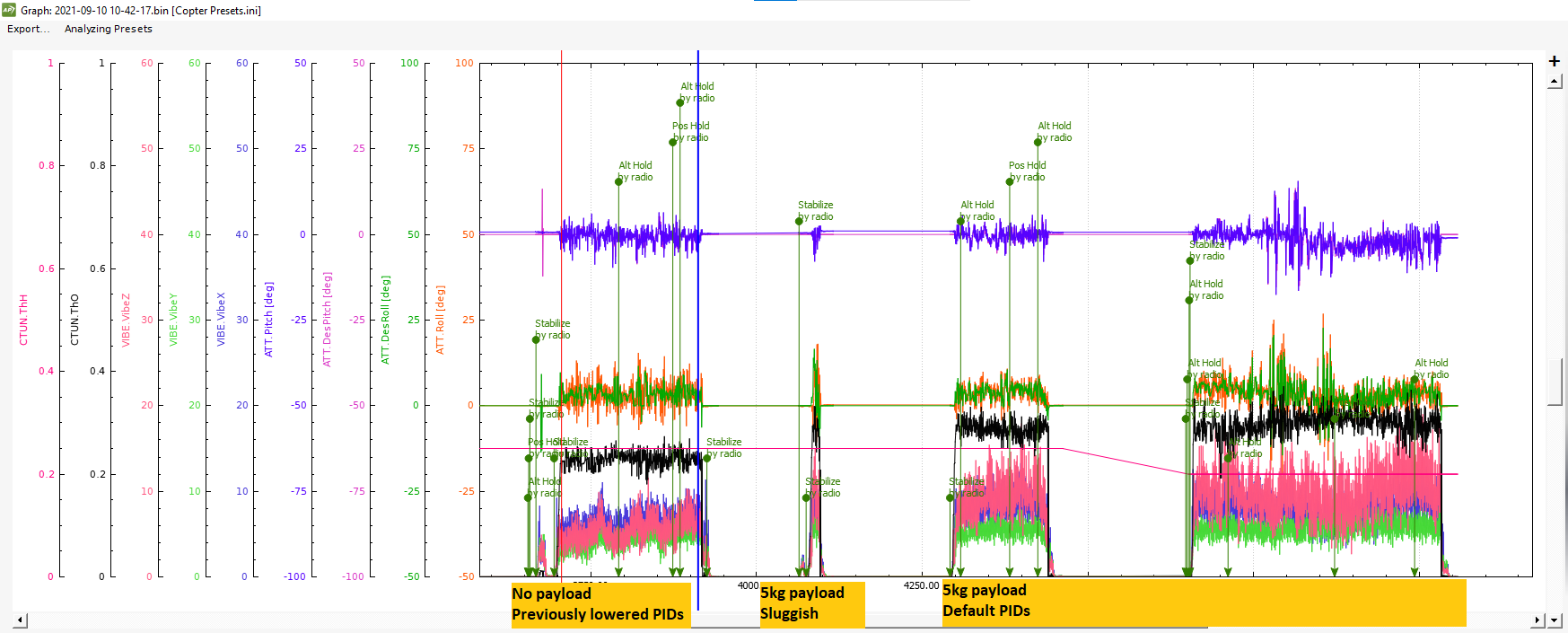
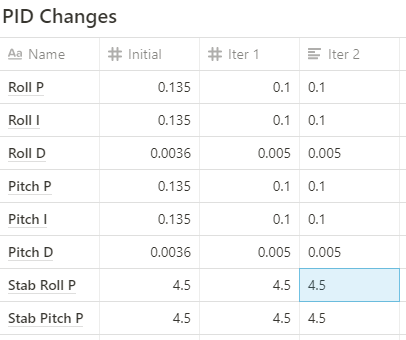
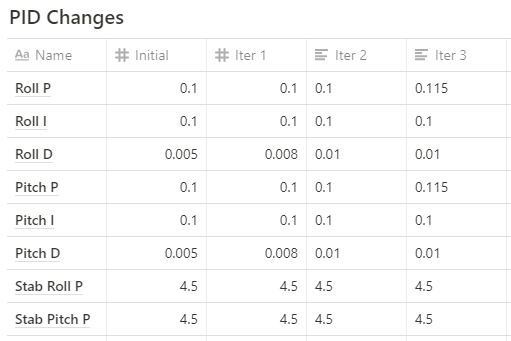
After increasing Rate D and reducing Rate P, noticed improvement.
PosHold was behaving much better, but gusts did unsettle it every now and then.
CTUN.ThO is around 0.3-0.35
A large hex, similar I suppose but every build is different…
These were reasonable:
ATC_ACCEL_P_MAX,23400
ATC_ACCEL_R_MAX,23400
ATC_ACCEL_Y_MAX,9900
ATC_ANG_PIT_P,3
ATC_ANG_RLL_P,3
ATC_ANG_YAW_P,3
ATC_INPUT_TC,0.22
ATC_RAT_PIT_D,0.036
ATC_RAT_PIT_I,0.25
ATC_RAT_PIT_P,0.35
ATC_RAT_RLL_D,0.036
ATC_RAT_RLL_I,0.25
ATC_RAT_RLL_P,0.35
ATC_RAT_YAW_D,0.007
ATC_RAT_YAW_P,0.41
ATC_RATE_P_MAX,720
ATC_RATE_R_MAX,720
ATC_RATE_Y_MAX,720
You could try a cautious take off and look for oscillations. Those params are “typical” for some large multirotors with the U8’s and Flames.
You’ll probably have to do transmitter tuning to get it right, I’m not sure I’d be running Autotune with those Flame ESCs. They’ve got a tendency to stop working mid-flight like a desync (but it’s not really…)
Get some real ESCs and mount them inboard if possible - longer motor wires/shorter power wires.
EDIT: test in AltHold and see if the hover value changes. Your primary flight modes should be Stabilise, AltHold and Loiter.
Dont even worry about PosHold. Loiter is so much more tunable and usable.
I see in Log 4 you did use Althold some and it seems MOT_THST_HOVER does indeed stay at 0.3
Thank you so much for that, I’ll try it out the next time I’m taking it out for a flight. To clarify, I would be backing up my current param file and then modifying the above values, correct?
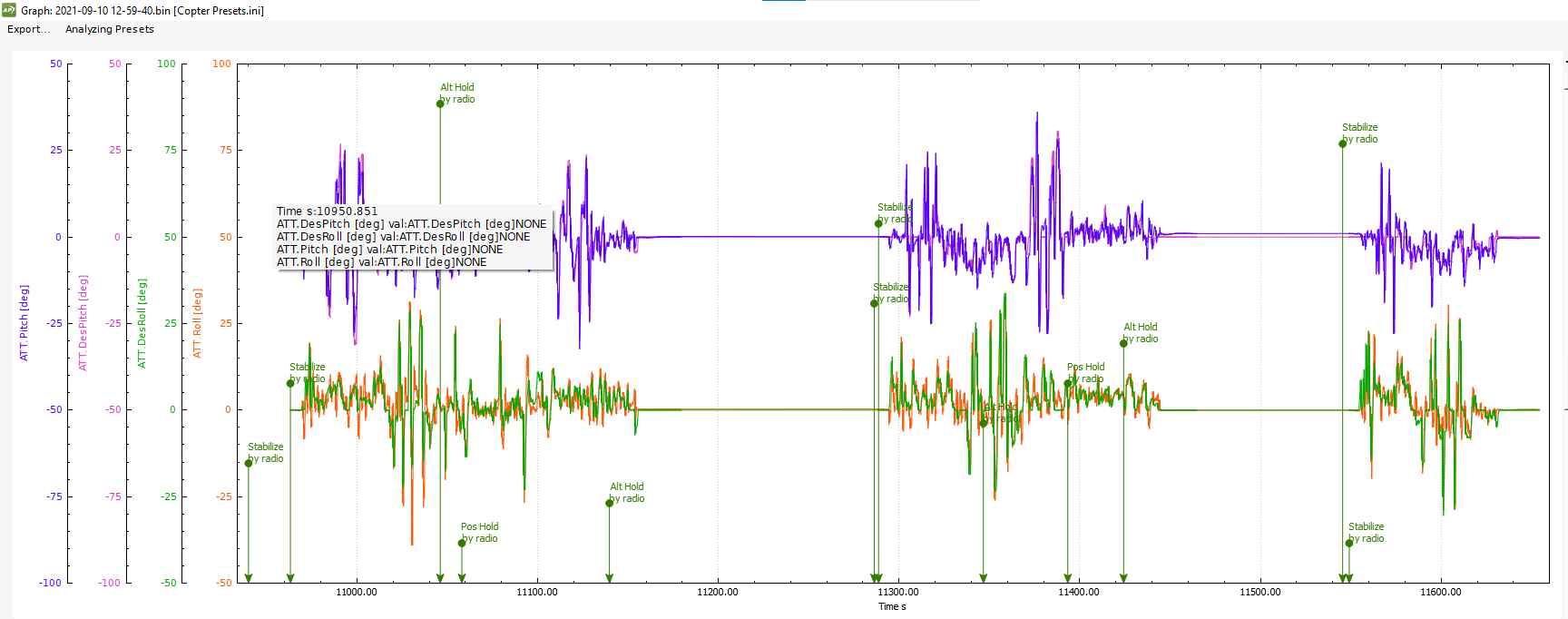
However, I wanted to understand the overshoot and how to adjust the PIDs by looking at the logs. This is primarily because, in Stabilize & AltHold it feels okay, but can still see the overshoots in the logs.
Oh wow, I had no idea about this. For reference, this is the airframe. It came with the propulsion setup, so I thought it would be matched.
How often does this happen in your experience? They stop during normal operation or when pushed to extremes?
Is it just that the ESC hardware is unreliable or something’s up with T-Motor’s proprietary firmware?
As for real ESCs, what are some options I can look at if I’m prioritizing reliability for large aircraft at this size?
Got it, I thought the gentler braking of PosHold would be better before having this tuned. Is that something I shouldn’t be concerned about?
I manually set it after averaging the log’s CTUN.ThO. I kept it in AltHold for a good stretch, more than 30 seconds, still didn’t see it change. Earlier, I’ve seen CTUN.ThH change in the logs and converge towards and/or move with CTUN.ThO.
Any ideas as to why that isn’t happening here? The rangefinder wouldn’t have anything to do with it, would it?
The setup definitely has ALPHA ESCs now - but I have worked with an older version that was outfitted with FLAME ESCs. Given that this post is 2 years old, it may have been the version that has FLAME ESCs.
I tried these parameters for my drone, 25 kg 12 s 30 inch 6 motors, and it had a lot of oscillation.
please explain the logic, does the PID depend proportionally and naturally on the weight of the drone? for example, the larger the drone, the greater the PID?