Hello, I have a question about preventing a lack of battery power when flying on a mission, i.e. we create a mission and the autopilot warns with a message that the mission cannot be completed due to battery consumption?
No, there is no off-line mission time validation. You as a pilot are responsible for doing that manually.
1 Like
Hi all! I finally collected my pepelats)
And tried to fly
first time tried in loiter second alithold and stab
In loiter and alithold there was an overshoot like , a quick swing in different directions with a crash and a flip. deep snow saved me from injury)))
when I turned on stab, it seemed to take off steadily, but it was carried away so quickly that I didn’t even notice how it landed, I was afraid that it would fly into a tree.
I am attaching a video of the start in loiter.
https://drive.google.com/drive/folders/14Q35My1F-A9lOhyRiuTl08qVMPvAoBJq?usp=sharing
перед настройкой пид все остальное есть.param (16.6 KB)
The first flight must be done in stabalize (almost full manual) mode, and you are responsible for positioning the copter and manually compensate against the wind.
Then use the results of that flight to configure the notch filter.
The second flight can be done in althold.
Only after autotune you can use loiter.
I think you should reset all to default parameters and start over. You have parameters set that don’t make sense. After doing so set the Initial Tune Parameters and then go to the top of this thread and set the parameters I suggested 2 months ago. Then work your way thru the normal tuning process.
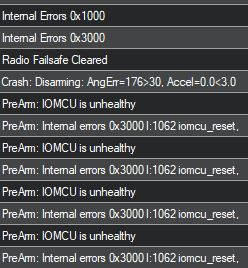
Also, that Flight Controller is producing some worrisome errors which you should have seen after reviewing the log yourself and asked about:
1 Like
thank you very much for the answers, I took the pid from this post
0×1000 can be solved by preference but I have new firmware
0×3000 this error is internally related to the imu, gyroscope, these errors did not exist, they could have appeared after the first crash. and what settings do not make sense? Show me examples so I can understand what you’re talking about
Guys, thank you very much for your support and help! My drone flew great yesterday! but for some reason the autotune did not start, but I will deal with this later, but now I am very glad that it took off. It’s an incredible feeling to see how a 25 kg monster hangs in the air without any problems! and I would like to apologize for the Past messages, I was in a hurry and I was very scared that I did not collect such large Drones…
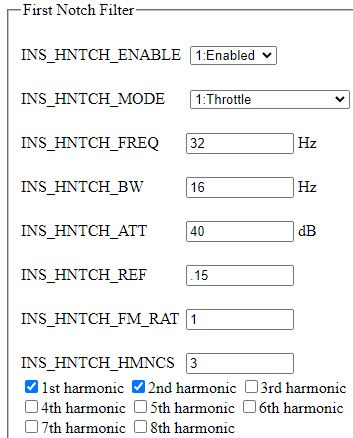
I see you reset to default, good. Never use parameters from another craft for any reason. But you made the same mistake that many have, rushing into Auto Tune before it’s ready to run. Where is your AltHold flight to use for the Notch Filter Configuration? Set these 1st and then make another hover flight to see how well it works:
Then if its stable and there is no output oscillation, which I don’t think there will be, run Magfit to calibrate the compass. Then think about running Auto Tune.
1 Like
Yes, I know and thanks for the tip that it was too early to turn on autotune, I still need to adjust the notch filter, but the throttle position for hovering was set to 0.15. And I haven’t figured out the notch filter yet. Unfortunately, it’s already late for me now and I need to sleep. Tomorrow morning, with a clear head, I will think and understand the documentation.
@Ilya_Smolnikov just do what @dkemxr posted. The parameters he posted are already adapted to you vehicle
1 Like
I tried to adjust it in Autotune but it didn’t work.
the drone bowed as expected and then a message appeared about the need to configure it manually. I tried it several times in both althold and stabilized mode
By the way, I don’t understand why it gives me an error on the compass when I took off there was no error, I see it only in the logs
Take a look at my post on how to methodically tune any multicopter. Looks like you skipped the magfit step.
Is it really because of this that it won’t start because the data is being configured? I used to set it up at all about the compass, I didn’t think about the auto-tuning, it went great, it seems like I haven’t flown for a long time and there have been big changes
You need to do some manual tuning before Auto Tune will complete. Try these:
ATC_ACCEL_P_MAX,25000
ATC_ACCEL_R_MAX,25000
ATC_ANG_PIT_P,7.0
ATC_ANG_RLL_P,7.0
ATC_RAT_PIT_D,0.01 (same for Roll)
ATC_RAT_PIT_I,0.20 (same for Roll)
ATC_RAT_PIT_P,0.20 (same for Roll)
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.34
PSC_ACCZ_P,0.17
And read this and follow the guidelines Setting Motor Ranges (surely I have directed you to this before)
Then perform 3 flights none of which will be Auto Tune:
Hover flight in AltHold for a minute or so.
Flight to collect data for Magfit. Perform a few figure 8’s with some throttle changes
A flight in whatever mode you want with some significant pitch roll and Yaw movements.
Clearly identify these logs and post a link to them.
Thank you very much, kind person, for these comments, for these comments and for helping me do my work, it’s very difficult for me to read anything now, we have the conditions of the Polar Night and we all walk around like sleepy flies. Yes, I completely forgot about this parameter, I installed it, there were two values 0.17 and 0.2. By the way, I noticed that some parameters were not set immediately. Perhaps this was an error in the flight controller. I had to reboot it, and only the second and third time they began to be installed. Before that, there was a failure error. Perhaps this was due to the fact that I was using USB power and not the main one
The way to never ever forget about something is to follow a checklist with standard procedures:
Do that and you will be fine!
Guys, I was wondering. How can you make sure that the percentage of battery charge in the ardupilot is calculated by voltage, and not by its consumption?
You can’t. Pack voltage is not a good indicator of charge used/left.
I connected the laboratory power supply to my drone and changed the voltage. To my surprise, Mission Planner and qground Control did not issue any warning; the color of the indicator changed in Mission Planner; and nothing happened at all in qrone Control. Why can’t you set it separately for voltage and separately for flow?The main problem is that after rebooting the flight controller, if you need to make several flights, the battery will again show 100%
Have you set these correctly?
BATT_ARM_VOLT
BATT_CRT_VOLT
BATT_LOW_VOLT
MOT_BAT_VOLT_MAX
MOT_BAT_VOLT_MIN
EDIT: yes, I looked at your log, it seems fine.
BUT you dont have these set - they are extremely important!
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
People that believe they can monitor battery voltage or flight time better than the flight controller, and choose when to take appropriate action, are just wrong. We’ve seen it in logs many many times.
I suspect you wont see any change in a ground station unless you try to arm or are already armed - but please set those two actions and retest, let us know if that makes a difference.
If you are sure the current sensor is reasonably accurate then you can also set these:
BATT_CAPACITY
BATT_CRT_MAH
BATT_LOW_MAH
but for them to be effective you always need to start with a fully charged pack, and dont reboot the flight controller in between flights.
The correct voltage settings are still required when using the mah/capacity levels in case a battery has a bad day or capacity is not as you expect.
EDIT:
Change this too please:
INS_HNTCH_FREQ,30