No, opposite - I was thinking higher gyro filter = higher D term and possibly P and I too.
Also what I meant was if you didnt want to manually mess with all that, you could set a higher minimum D for autotune and see what it does with the higher Gyro filter value.
Always call out if I seem to be wrong or you think differently.
Shawn I have a busy 2 days coming up, but Friday is supposed to be sunny and 80. I will try both 20 and 30, then run an AT on each and see where all the PIDs fall. I will post up my results after for you to look at
The higher the gyro filter the more noise will get through to the PID loops. High D will amplify that noise. So too high a gyro filter with too high a D will smoke your motors.
Any ideas on what changes I should make to get cooler motors?
I can’t download the log above. Can you post one with the problem and your full parameters?
Yes here is it 220mm autotune = battery die
I’m trying to change frame size but not succes ![]()
Also trying change 1 motor 2700kv to 2300kv some time giving stable flight but 5 to 6sec after running oscillation
Im not understand very much can you tell me some giving normal example ![]()
Thank you ![]()
It is worth looking at the parameters ATC_RAT_xxx_FLxx . For my smaller vehicles the default values are way too low. These are low pass filters on p rate and d rate outputs to decease noise to the motors like the accel/gyro filters discussed above. These low pass filters generate a delay in the vehicles understanding of it’s own position which makes error compensation problematic no matter what gains you set.
1 Like
Here you go https://drive.google.com/open?id=1R3oAwyUnc3Ks7FGzrjTfhuF2G73nDf_w
This is just a quick hover in my yard. The motors came down pretty hot. Not hot enough to keep me from flying but I’d sure like it if I could get them cooler.
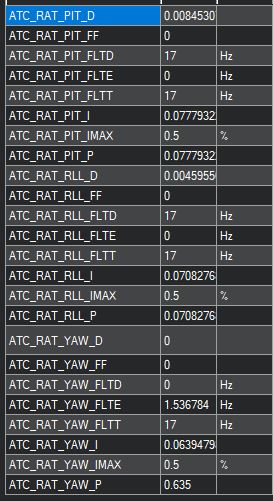
At least with the gyro filter I can’t take it above 27hz or so without really bad vibrations being introduced that make it unflyable with very hot motors. Do you have any suggestions for tuning the ATC_RAT_xxx_FLxx set? Here’s my current settings
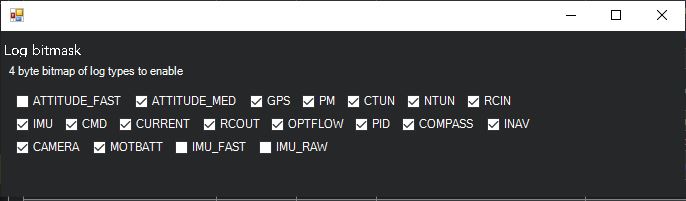
Apologies - I need to see a log with PID and ATTITUDE_FAST enabled. Can you enable these?
Also the in-flight FFT data is really jumbled because you have the old code - any chance you can rebase from today?
Just to be clear, your motors should be cold after a brief hover. Hot is bad.
Yea I’ve always known hot motors to be wasted energy at least, and smoked motors at worst 
I’ll rebase today and enable your requested params. Thanks for the help! The notch filters made a big difference, and I want to get everything else as close as possible to perfect.
You appear to be using optical flow in a position control mode. You should troubleshoot attitude and rate control issues separately.
The values you have pictured are output filters on rate and rate derivative and not the imu inputs to the attitude estimation. The 17hz d rate filter is very low. The delay this creates causes the attitude to overshoot with higher gains. Autotune responds by solving with lower gains. If you leave these gains and then increase the filter frequency the vehicle will oscillate. If you speed up the filter and manually lower the gains before redoing autotune you will get different gains.
Your motor outputs are not terribly chaotic so the heat may be from propellers being too big for the motors at your vehicle weight or esc timing.
2 Likes
Andy, where do I enable PID and ATTITUDE_FAST? I found GCS_PID_MASK, in MP but that’s it. I’m running 4.0.4rc1
1 Like
There’s nothing obviously wrong here. Some noise on the PIDs, but not massive. I guess you could try increasing the filtering by setting FLTE on roll and pitch to the same value you have for FLTD.
Thanks for taking a look at it. I’ll give those a shot. What do you think about Eric’s suggestion to raise the gyro filter closer to 30hz, lower the PIDs, and do another autotune? After flying quite a bit yesterday I did notice that the motors came down just a bit warm, which is much better than before. The only thing I changed was the dynamic notch att from 15 to 20. On that subject, is there anything to be done about reducing the noise in the accelerometer? My gryo is clean, but the accel definitely has some noise going on.
On that size of quad what you have is probably ok. I have a very noisy Y6B and with really good notch settings even 40Hz is too high for gyro. If your copter is noisy the high gyro will let through more noise and you will get a bad tune.
Nothing you can do about the accels other than get the gyros right as there is a second-order effect.
You can put the notch ATT up to 40.
I was going to ask - your notch frequency is set to 50 but your hover frequency is more like 100Hz it looks like - you are sure you have got the scaling right on ref?
When we were working on the notch tune together in the big thread we originally though my main harmonic was about 40hz. We figured out that was actually frame resonance and I used the static notch to squish it. What value should I set it back to for proper scaling?
To answer the scaling question (I think?) it’s set to 1.0 as I’m using ESC RPM.