Yes I know. Suggesting set them to default.
Recommended for 6S is
MOT_BAT_VOLT_MAX = 25.2
MOT_BAT_VOLT_MIN = 19.8
No, I’m talking about the processor load and the Long Running Main Loops being high.
Yes I know. Suggesting set them to default.
Recommended for 6S is
MOT_BAT_VOLT_MAX = 25.2
MOT_BAT_VOLT_MIN = 19.8
No, I’m talking about the processor load and the Long Running Main Loops being high.
The defaults for MOT_SLEW_DN_TIME and MOT_SLEW_UP_TIME
are both 0 right?
I’ve updated the MOT_BAT_VOT_* parameters.
I may have left the INS_LOG_BAT_MASK set to 1, would that cause the processor load you see?
Ok, I’m going to tune again tomorrow morning. It seems the big thing to change is the initial pitch P. Anything else I should pay attention to @dkemxr?
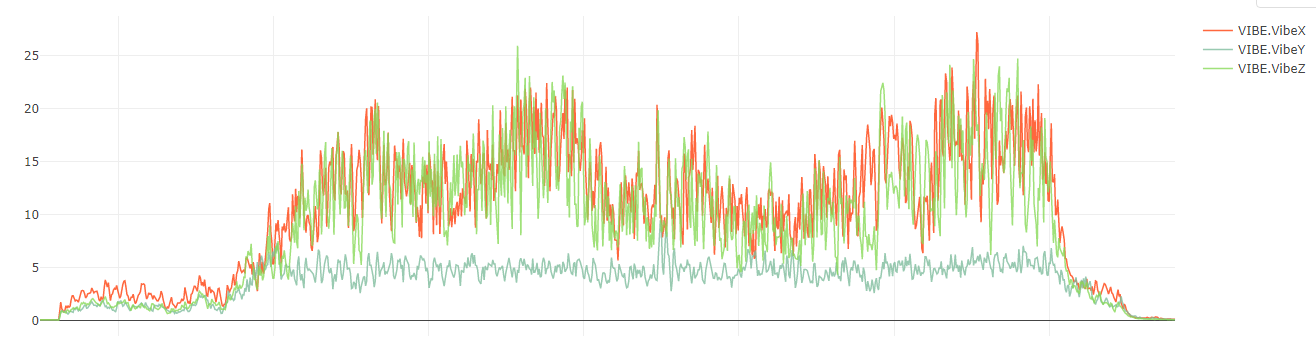
Your X and Z axis vibrations need a bit of improving. Y axis is good and indicates damping in that axis is different to damping in the X and Z axis. Look for wires pulling tight or something bumping against the FC. Try to get the wiring so it’s flexible but not waving around loose where they plug into the flight controller. Check for anything else loose too.
If you can improve the vibration levels you will improve stability right away.
Then try these:
ATC_INPUT_TC,0.2
INS_GYRO_FILTER,22
ATC_ANG_RLL_P,5.5
ATC_ANG_PIT_P,5.5
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.00625
Do a take-off and look for oscillations, if all is going well then do some hovering and gentle fly around. Land and check for hot motors or anything unusual.
Send us a link to that log file.
Thanks for the guidance @xfacta, I noticed that the Y vibration was low, but this points at exactly what you’re talking about. This gives me hope.
For the PID parameters, can you give me some details about how you chose these numbers?
I’m just kind of rounding those PID values to something safe, and D term (roughly) is about P/15 to P/20 in most cases. I wouldn’t say that is a rule though.
I’m hoping the INS_GYRO_FILTER value has a noticeable effect.
I’ve been curious about this for some time… why are the P and I values always the same?
Ok, I further isolated the controller and it seems to have an effect. I haven’t tried isolating the #4 quad yet (where these last logs were from) but I’ll try that shortly. I also tried these PID parameters out on our #3 quad and it seems very responsive in the air. I do like the way this feels. Unfortunately, I was getting pretty bold towards the end of the flight and while trying out RTL it went into a severe oscillation and crashed. Nothing a little 3D print can’t fix though.
Here’s the log with those parameters: https://drive.google.com/file/d/1NFceSFd_AXjPNd8ATmLump9kgWP5lJS-/view?usp=sharing
Note that INS_GYRO_FILTER was set to 20 previously - I updated it to 22 for this flight