700 heli shaking on hover. first build. bought a used heli. have discovered many problems with the heli and think i got most of them fixed. i am trying to tune the atc_rate_roll_p and pit_p. i have them at .08 for each.
which i read was min. and supposed to fix oscillation. I had better luck lowering the
Lowering the ATC_rat_pit_p, And rat_pit_d, rat_rll_p, rat_rll_d. These seemed to stop a lot of the shaking. Had 1 flight in and did not have telemetry on it yet. Ran batteries to 21 volt on 6s. Was coming down and ran out of juice at 10 feet. Landed pretty rough but everything survived as well as I can tell. Tried flying next weekend. And heli flies smooth until a correction is needed on cyclic or a breeze causes the stability to correct it then shake begins again. Landing with one skid on the ground you can stop the shaking and go back into a hover until something changes and needs input and shakes again. I messed with all the tune parameters and did not notice any difference. I pulled a log from the only flight that was good before the rough auto. According to the rate tab des.p and p. I have a problem with my computer graphs in APM planner 2. Or I something us wrong with the data collected. One starts off at the top of the screen then slopes to the bottom. Fairly straight line. The other looks like an oscilloscope center lines stays middle of page with peaks and valleys 1 inch long. Bottom of the graph says index not time like ardupilot tune page does. Any help is appreciated.
Hi Alan,
Welcome to Tradheli! have you read the wiki on tradheli here
Please look through this and watch the setup videos. The tuning section gives a pretty detailed explanation of doing your tuning. there is a generic default parameter file that may get you pretty close but it is worth going through the tuning just to learn what each parameter does. If you have any questions, don’t be afraid to post. we’ll try to help out as best we can.
Regards,
Bill
Thanks bill. For responding. I have been attempting this as a trainer heli of and on for a year now. I have been in contact with Chris. He has helped greatly. I posted here cuz I personally feel that I am becoming more of a nuby. And don’t want to be a thorn in anyone’s hind end. Iv had quite the learning curve. Heli had bad main gear wobble among other issues. Just can’t seem to figure out why my log files with des.p don’t look similar to the the wiki.
https://drive.google.com/file/d/15OLqKEGrVh2TOG6w7epuJh6LmlJrms-Q/view?usp=drive_web
The hover flights I did this weekend. I moved all the parameters on the tuning page individually one at a time. I moved them up and down. From the list I posted earlier. None made a difference. I hovered 30 plus times over 3 hours of messing with it. It is stable as in it is easy to hover in 1 spot. But the violent shaking can’t be good. First flight that it did not shake much a fee weeks ago is the log I sent. After we dropped the params listed above below min. Was a lot of fun. I’m gonna recalibrate the accelerometer again. I don’t know if that would be a problem. It says we had a good calibration a few months ago.
did not know how to share google link should be good to look at now.
more info on the heli. taranis radio x9d, x8r reciever with new craft telem cable, series 6s lipo for 12s, esc ice 2 hv 120 mounted on the sloped nose, cuav v3x, v3x is mounted in the battery tray as close to center under the main shaft arrow pointing back on both the v3x and 8mn gps. leveled the swash with pitch gauges to a .1 degree all the way around. blade tracking looks great spooled up on the ground or in a non shake hover. hung the copter by the center of the main shaft cg looks really good also.
Alan,
Are you sure you provided the right log? This shows a setup for FRAME_CLASS 8 which is single copter. Your frame class should be 6 for traditional helicopter (i.e. single mainrotor /tailrotor configuration). Please check your log file. Also post your latest param file. That is usually a pretty quick sanity check for me.
Param file has an extension named params. Site will not let it upload. I saved file as. Param and site does not see the file.
Alan,
I’m not sure why you are having that issue. Many other users have uploaded *.param files to the forum. If you need to just put a different extension on it like *.txt.
2heliparams8-17-19.txt (22.9 KB)
Here is the param list I hope it works uploading
I hope it is something as simple as a wrong button clicked or frame setting. I thought learning to fly a heli was going to be the hardest part of this adventure. I can say I’m no 3d pilot. But I can fly around my house with 70s and on Sim heli-x. We have scratched our heads bald trying to get the bugs worked out. According to what I see I don’t have to much vibe issues. He log I sent had stab. Then I tried loit and it started doing slow 5 ft funnel type flight. Mainly level tho. And jumped back to stab. Figured that it had to be adjusted more for loiter. I have 1 flight where I tried acro and it was cool. But at end was the auto rotate because of battery.
The param file looks like everything is consistent for a tradheli vehicle. Why is your ARMING_CHECK param 0. that should be 1 to run all of the arming checks. Highly recommended!!!
the log you sent was not for a heli. the params in log file were for a single copter and not a heli. Please send me a log from a recent flight.
Here are 2 logs from when it was shaking prior to rat_rll/pit_p/d reduction changes. Also Chris pointed out we had channel 6 auto tune on at that time. All those made it better for 1 flight. Will have to get newest ones from computer at home later. I don’t own any other flying machine that connects to a computer. I sure that is the log from the stab loot stab flight. https://drive.google.com/file/d/1-7TK6TbgHbY2ozr311zGkJuEkWFZG8hH/view?usp=drivesdk. . https://drive.google.com/file/d/1-0ozwR3VNGic5t-dgAKbAOu2DtF9bsSH/view?usp=drivesdk
Alan It appears that your logs are getting corrupted or something. The first one I looked at, 00000001.bin, looked like the one you posted yesterday. There were multiple messages indicating logging errors. The second one posted, 0000002.bin, was perfect. However it didn’t look like you flew much if at all. Almost like you were just on the ground doing a ground run. It was only 1 minute long.
So I will need better logs. If you fly again please set LOG_BITMASK to 131071 and INS_LOG_BAT_MASK to 1. Then post the file.
Thanks
Will do I never found out much on log paramaters. For the first several months we were working on mechanical problems. And finally figured out how to turn logs on. It has always since then said logs are corrupted ??? Like I said before. I knew we needed to link the electrical to the mechanical and adjust a few things. When it comes to finding the correct parameter out of hundreds to fix what I got wrong I am a complete newby. We might still be fighting the swash going crazy and just toned it down by dropping the rat p/d params below min. Just like putting a bandaid on it and not fixing the root cause. Will get a new flight and param list sent in the next few days.
i changed the log params according to what you said. i re calibrated the accelermoter and the level compass. then i flew. armed lifted off instant shaking. landed let it calm down lifted again several more times their were times that it looked perfect. no shake then a small cylic input started the wobble. even with the shake copter was rock solid no drifting. shaking causes the copter to lose altitude but more collective overcomes this. hope you can find out what i did wrong. o copter frame is set to heli and plus tail.
log file
tlog
params
Hi Alan,
There is nothing seriously wrong with your helicopter other than you have the P and D gains set too high. The oscillations you are seeing are called a feedback instability
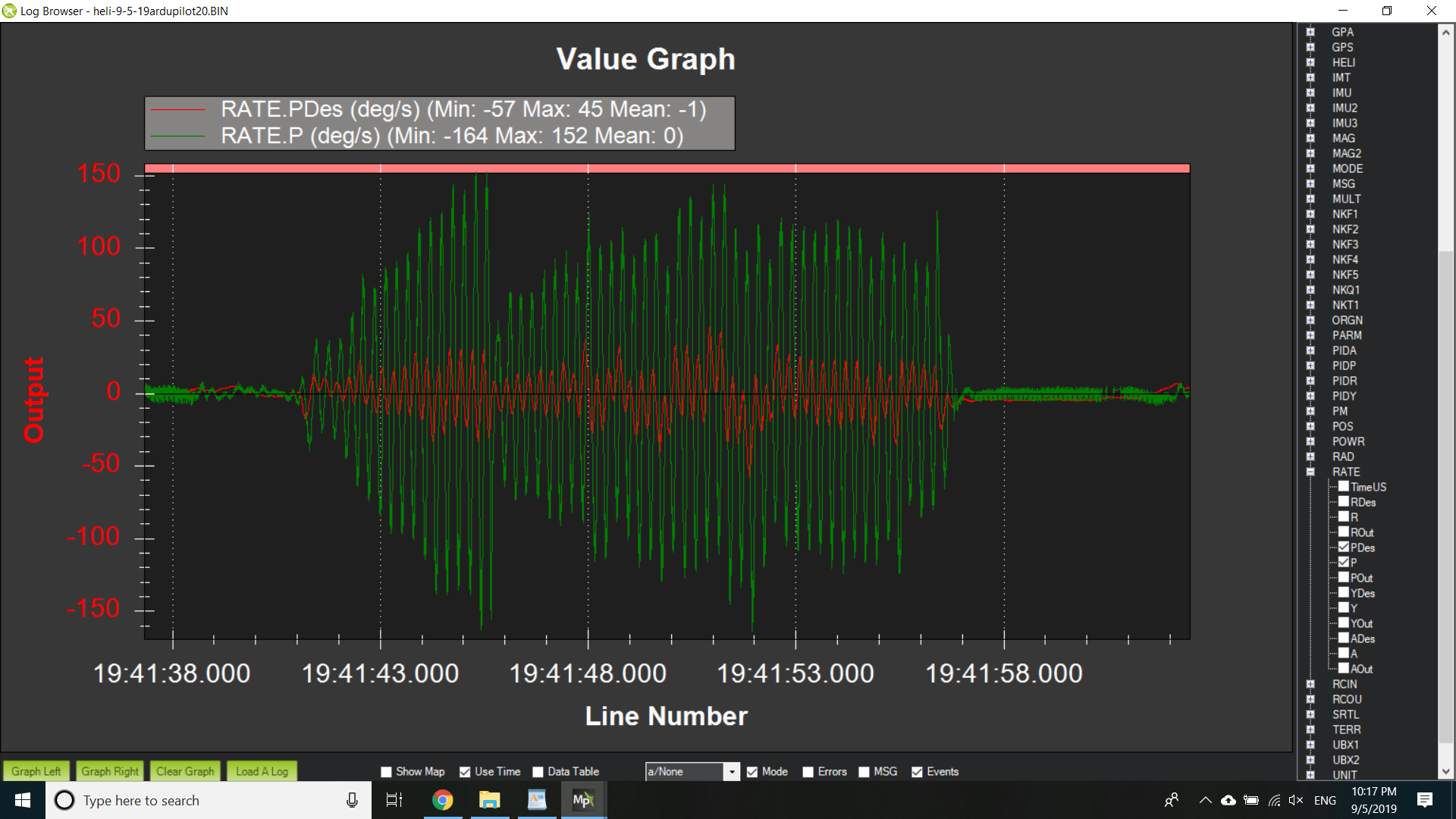
You can see the oscillations are about 3 hz (3 cycles/second). You can also see smaller faster oscillations on top of the large ones. That is a 1/rev oscillation. I’m guessing that you are running your rotor speed around 1500-1600 RPM. Good news is that the faster oscillations have a small amplitude.
So It looks like you used the default file for PID gains. although I didn’t think the P gains were quite that high in that file. So I recommend that you zero the PID gains for both pitch and roll and use the heli tuning guide here to set these gains. If you have questions, don’t hesitate to ask but I’d rather you go through this guide and do it yourself. Like I said your vibrations (high frequency oscillations) look pretty good. I might recommend using the notch filter. You can enable it using by setting the INS_NOTCH_ENABLE and then reboot the controller. You can then set the rest of the parameters.
INS_NOTCH_BW 10
INS_NOTCH_FREQ 25 (if you rotor speed is set to 1500 RPM) This parameter is in hz so just take your rotor speed in RPM and divide by 60 to get Hz. You can round it to the nearest integer.
INS_NOTCH_ATT 30
Once you get the P and D gains set according to the tuning guide then post a log here. By the way, turn your INS_FAST_SAMPLE off by setting it to 0. I was wondering why I didn’t see any batch data. I can better look at your vibrations with the batch data.
So I was re-reading your posts. I thought that I remembered you saying that you worked with Chris to tune the heli. So what you refer to as the swash going crazy and having to lower the rat p/d params is a little different for each heli but typically you will NEVER get heli rate gains above 0.1 for Pitch P, 0.01 for Pitch D, 0.05 for roll P and 0.005 for roll D. this is unheard of for heli’s because of their rotors being lightly damped. It is nothing you can magically fix with a mechanical or electrical fix. It is just the physics of a helicopter rotor system.
The only “fix” that I’ve come up with was using a rigid 4 bladed head that pushed the frequency of the instability up to 5 hz. then I had to use a notch filter to keep from exciting the instability so I could raise the P gains up to 0.2 and allowed me not to even use the VFF (feedforward) gain. With larger heli’s that have larger rotor systems, it is hard to get that frequency above 3 hz. It needs to be up above 4-5 hz so when you use the filtering, it doesn’t affect your control of the aircraft.
Thank you very much. Very detailed. I will try that as soon as I can. I was worried I was adjusting the wrong param and not fixixing the root cause. The program when you click on rat p gain says what min and max was. We went below that. So thought we were doing wrong. Thanks again
I think we are getting a fly machine. was a little windy less than 10 mph. did the vff and gain testing on other flights only sent a log of the last flight to see if i did it right. vff des rate looked a little high still so probally should have went to .18 but have not seen many people move their rates of vff from .15. it is within 8 units of measurement on the peaks and oscilations look so much better. i could barely move the p and d gains before it started shaking. so that had to be my problem the software says min is .08 and that is why it was shaking. .02 is what i set it at. software was throwing me for a loop. probally a little twitchy or fast for my liking i dont know if i need to slow down rc feel or mess with the accel max. not sure if i understand the I settings yet. i set the rll and pit i to .17 like it said. Do i fly it at my max speed for the imax and ilmi or do i use auto flight. not sure how fast i want to go. mabey 10 to 20 kts and 35 to 40 kts on the return flight. just learning how to run the hole thing then i am going to buy a built gasser.
@Alan.h this log file and the params file are the same as what you posted a few days ago. Are you sure you posted the correct files. So there is no longer an RC_FEEL parameter. It has become ATC_INPUT_TC. Your value is quite large at 0.35. I would suggest lowering this to 0.2. The default value is 0.15 but that is pretty quick. Don’t do any forward flight yet. Let me see what you have for the tune in the hover.