first mistake:
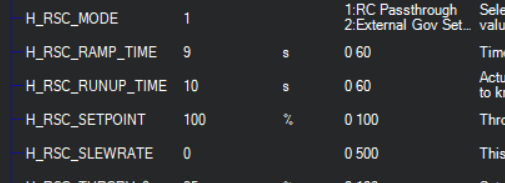
H_RSC_MODE should really be set to 2. Having RC passthrough means you will not have the soft start and no failsafe logic benefit from the autopilot in caseof radio loss Then you can increase ramp up times to get smoother spool-up. It would help also having an rpm feedback (i.e. RPM sensor installed and connected to the autopilot).
Oh I missed this one!
So you think after change the value to 2 I can hover safely?
I knew there is something wrong going on!
The bird kicked the tail fast 180 degrees…
What about the other values what do you think?
I been flying RC helis since 2008 and can tell this bird is not right!
Thank you for the respond and the big help!
Are you using esc governor or not? Sorry that’s not clear to me at the moment. If you are not using esc governor then you’ll have to setup the throttle curve in the autopilot and set rsc mode to 3. If instead you are using esc governor set rsc mode to 2. Before doing any further test I’d suggest to remove the main and tail rotor blades , so you can experiment with the spool up times parametrization safely.
I use the ESC hobbywing gov,
but just for info, how you setup throttle Gov in the mission planner? after set the RSC_mode to 3
Edit: do I MUST disable the ESC GOV in order to choose the PIXhawk parameters GOV?
or I can leave the ESC as is?
I will remove the blades and run it to make sure the startup timing is correct…
will report the result
Thank you !
If using the Hobbywing Governor function you don’t need to setup governor/throttle function in the flight controller, especially because there is no rpm sensor installed. So you have to rely on the external governor to keep rpm constant.
I had look at your ATC parameters, they look a bit messed up:

First ATC_ACCEL_Y_MAX is way too low for a heli. I would start at 65000.
Then ATC_RAT_YAW_FF is at 0.15. Bring it back to 0 for now.
ATC_INPUT_TC is a bit low for a 900 class, bring it up to 0.21.
Did you set intentionally FLTE and FLTT for roll and pitch?
Perfect, I corrected all the above parameters, calibrated the ESC and ready to hover tonight!
Thank you Ferrosan for the help!
Ok, I tried to hover but the tail was shaking fast ( tail fish )
I was not able to leave the ground☹️
where I can go and lower the Gyro ?
Thank you
try and reduce ATC_RAT_YAW_P . Is the tail boom mechanically sound ? boom reinforcement braces installed?
It’s stock 700 boom and shaft drive system
It was shaking like fish tail
Is the ATC_ACCEL_Y_MAX 65000 effecting the gyro sensitivity?
No, try and reduce the p term as per previous post.
1 Like
@Ferrosan you may want to consider looking at a log with the PID logging and see which term, P or D is higher in magnitude and then reduce the gain for that term.
Sure thing Bill, I thought first to advise initial values to get off the ground safely.
@flyingdragon please change your log bit mask parameter so to include what Bill suggested.
Still not sure how he did set the FLTE and FLTT values… they seem odd to me. If those come from previous successful flying or not.
I only updated the firmware, I didn’t know that I need to re do all the setup all over again!
The P and D I set them both to 0
I don’t know what FLTT and FLTE
I just updated the firmware and recalibrated the unit and the compass along with the radio.
I also changed both PID to 0
And re set the other parameters values as your guys recommended above…
The machine not smooth enough looks like high rpm or maybe because I installed 3 blades that cause the speed?
Thank you
Where did you get the idea to set these to zero. You’re referring to ATC_RAT_YAW_P and ATC_RAT_YAW_D? That was not the intention at all especially when we told you to set the ATC_RAT_YAW_FF. You just need to reduce them until the oscillation goes away.
The only reason you are having to change the tune on the tail is because we asked you to change the ATC_ACCEL_Y_MAX. Having the higher accel max is good but it requires to retune the PID.
1 Like
Hi, so did you get it off the ground? If so can you post a log?
We really need that rpm reading, best would be to have sensor installed on the heli. Otherwise you could measure while on the ground with an optical tacho.
my question; the auto tune should set the PID for me? Or I still need to tune the pitch roll and y manually?
If so then what the reason of having auto tune?
Thank you to both of your guys!
Bill, I see what you mean regard the FLTT and the FLTE
the old firmware I had in my unit since 2019, you helped me set the parameters and was successful journey, but now I upgraded the firmware to the newest, and those FLTT and FLTE FLTD all was already in the new firmware, I didn’t change anything…
so I see they replaced :
ATC_RAT_RLL/PIT_FILT to FLTD, FLTT & FLTE
so this total new to me, do you recommend to change them?
currently I have these values;
ACT_RAT_PIT_FLTD 0
ACT_RAT_PIT_FLTT 23
ACT_RAT_PIT_FLTE 2
ATC_RAT_YAW_FF 0
ACT_RAT_RLL_FF 0.15
ACT_RAT_RLL_FF 0.15
ACT_RAT_YAW_FLTD 0
ACT_RAT_YAW_FLTE 20
ACT_RAT_YAW_FLTT 20
ACT_RAT_RLL_FLTD 23
ACT_RAT_RLL_FLTE 0
ACT_RAT_RLL_FLTT 23
ACT_RAT_PIT_FLTD 0
ACT_RAT_PIT_FLTE 2
ACT_RAT_PIT_FLTT 23
(old value from the old firmware with old 2 blades head rotor);
ACT_RAT_PIT_P 0.005
ATC_RAT_YAW_P 0.1
ACT_RAT_RLL_P 0.01
ACT_RAT_RLL_D 0.0005
ACT_RAT_YAW_D 0.003
ACT_RAT_PIT_D 0.0005
ACT_RAT_PIT_I 0.12
ACT_RAT_RLL_I 0.1
ACT_RAT_YAW_I 0.12
ACT_RAT_RLL_FF 0.15
Thank you…
No, I was unable to hover due to unstable run up,
I will re set the PID to the old numbers I had 2019 and
see if I can hover smoothly
Edit: I will wait for your guys suggest the recommended values…
I appreciate your help
My knowledge is much less than Bill’s and Ferr’s. Nevertheless, a suggestion from me as well.
I would tune my heli again from scratch. That starts at this point:
https://ardupilot.org/copter/docs/traditional-helicopter-first-flight.html
And goes up to the preparations for the manual tuning or the “auto” tuning.
https://ardupilot.org/copter/docs/traditional-helicopter-tuning-preparing.html
I would keep the hints from Bill and Ferr regarding the logging parameter, of course, so that you get enough values for logging.
After the preparations according to Wiki, you should at least be able to hover the helicopter safely. And than start tuning.
BR
Heri
1 Like
@flyingdragon yes, it tunes the PIDs for you.
Edit: I don’t manually tune anymore. And in special cases where I might have to manually tune, I will have the user perform a flight using the system ID mode and then estimate through analysis. The tools are getting better where using a knob to turn the gain up and down is becoming a thing of the past.