Hi everyone,
I started posting questions on different thread, and its look like is better to open my own thread just so I don’t take other people threads!
I started the build and now I am between the PID tuning and the next step after that to reach my goal to the Auto flight mission planning
I was reading and watching different videos regard the PID and what they do and how they work!
so I was able to tune my Heli let say ( beginner) not a pro,… as I was increasing the values manually between P and D and one time I increase the PITCH P and I had to decrease the PITCH D or increase the PITCH D and decrease the PITCH P and so on till I got really nice scale flying heli!
so I uploaded the Logs for today as of AUG-14-2019
and hopefully Mr. Bill or anybody can tell me if I am good in the VIB range! after changing the dampers it was like from dark to daylight!!
solved all my pitch shaking problems !
I see the Pitch Des vs Pitch graph need tweaking to get the both same ! so I think I will increase the ATC_RAT_ PITCH_D and lower ACT_RAT_PITCH P … or just increase or decrease the VFF and see if they will match perfectly ?
please any idea if my Y VIB still bad? its the only one around 15
X and Z are under 10
Hi Ozzy,
I think your vibrations look pretty good from the vibe message. Are you using the notch filter at all?
In my opinion, you had two issues with your aircraft. One was the vibrations which it appears you have addressed. I consider vibrations to be things like rotor imbalance and airloads from the rotor blades being transmitted back into the fuselage at higher frequencies. The second was a pitch oscillation. This is different from a vibration because it is a lower frequency where you are exciting the natural dynamics of the heli. This is why I asked you to use different stiffness dampeners to try to address this issue. But it doesn’t look like that worked. Oscillations due to the natural dynamics will appear and become worse when you increase P and D gains. If you don’t lower gains to stop the oscillations, it is possible that they could cause the aircraft to crash.
So it looks like you addressed the vibrations. Typically vibes below 10 is good. Now you will need to look at the pitch axis and adjust your P and D gains until the pitch oscillation goes away. Lastly, you’ll want to raise the I gain to get the desired attitude and the actual attitude to closely follow each other
Hope this helps.
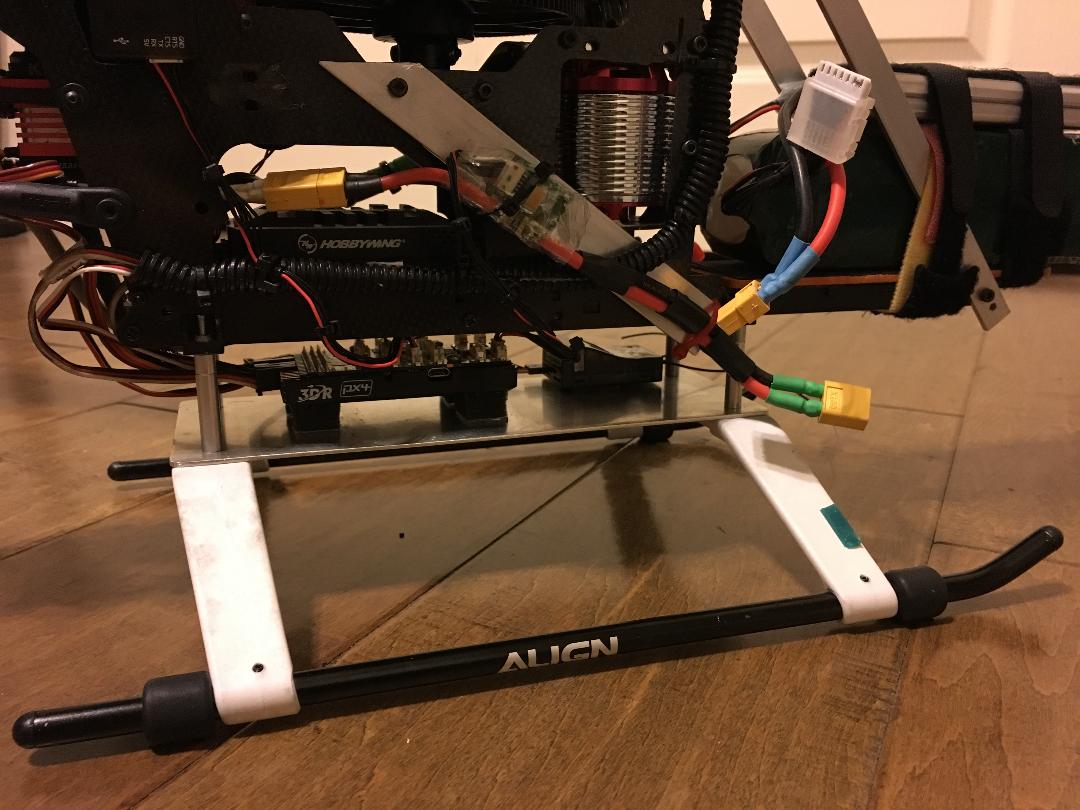
Yes I found the problem by removing The head and spin it; found the main shaft was not that good!
Replaced the main shaft and replaced the dampers with some thick plumbing grease and the tail shaking dispersed,
Now I know my 3DR pixhawk is old and the damping system is not good!
I ordered the black cube and the here 2 gps to install it in my other heli! I had SK720 but I sold it and now the new pixhawk is on its way !
I am going to try this week with this heli and if no result, will sale the 3DR and get another cube !!
That both Helis have the same systems !!
Anyway I tuned the PID, it was a hole week of tuning
Every time I go little with the gain I download the logs and look to everything till I get what you see …
The last think I am working on it now is to make another double damping base that the board can set on it
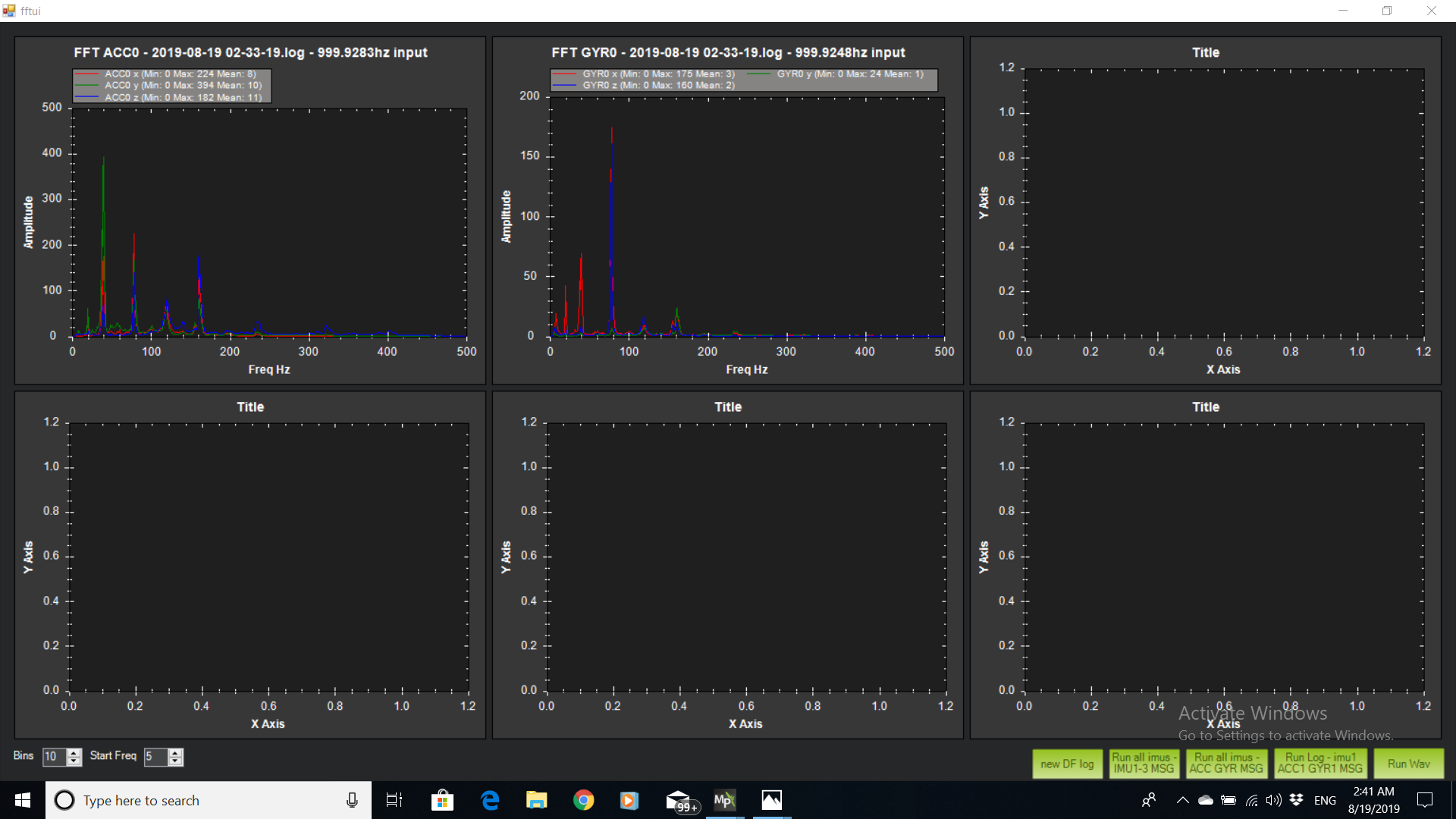
I also want to show you that if I lower all PID to 0 the FREQ will still effectively!
Now regard the Att and matching the Des R and R with Des p and p ; I tried many times with lowering or increasing the VFF values,
Also lowered the P gain to get these result…
Now the helicopter fly like stable drone !
I will report back with another tuning after replacing the base …
I am not sure if that is smart. I don’t know much about your rotor head but you could potentially damage your rotor head block because the spindle is now free to move. The dampeners provide stiffness but also keep the metal of the spindle and rotor head block from contacting.
What do you mean by this statement? It doesn’t make sense.
Oh sorry for the confusing, I was thinking when you said lower the PID values to lower the oscillation, so I thought the relation between the high frequency that I currently seeing in my frequency screen related to the PID values it’s set to high?
Regard the main shaft; the stock head had some runout over 0.02 measured using Machining gauge…
I replaced the stock dampers ( black) with the white one because it supposed to be a better quality than the black one ! Just what I have in hand, I used to use synthetic white grease but because of the summer heat it will wear the dampers fast
So based on some (helifreaks.com) members advises to switch to a plumbing grease because it can Handel the heat and stay thick not become liquid fast…
It gave me good result as my old problem disappeared and the vibration went down under 10.
So now my current problem is the high frequency right ?
I will lower the PID values as you suggested and upload the new logs…
When you say vibration you’re talking about high frequency oscillations that are above 20 Hz. That is what we use the vibe graph to look at. Vibrations at 20 Hz means if you were to graph roll rate like the r signal in the RATE message, you will be able to count 20 cycles ( or peaks ) in a second. Your PID gains will not affect these vibrations. Again these vibrations are due to mainly rotor imbalance and air loads. Typically when these are high, it is due to an improperly balanced rotor or placement of the flight controller
The problem you were having in the pitch axis is more of a low-frequency oscillation. Where the frequencies are below 8 to 10 Hz. If you were to graph the P signal in the RATE message, You would see with your heli oscillations where you could count three cycles or peaks in one second. This is an issue that can be fixed by lowering the P and D gains.
These are two different problems that have different solutions
Thank you so much for The explanation, I am trying to figure it out how to check the cycles (peak per second) So I can find the amount of low frequency!
I am fallowing your explanation step by step to learn this . Its truly difficult part for me!
Will be great if there is graphic or educational video showing these very important steps so that I and others can check the issues right away, I am sure there are tons of info and graphic analysis but to learn how to read them is the issue!
So when you said Count 3 cycles in one second ( peak per second)
You mean the jump in the graphic up + or down - correct ? ( and that for both P and Desp and R with DesR )?
I will lower the P and D gain today and take a look to see if I can get better result
Sorry for taking to long to understand the information! I thank you very much for the help !
Just wanted to make sure that the problem is related to the blades or from the new shaft again
I removed the rotor head from the Heli and run tested on the bench and uploaded the logs
do you still see that low-frequency oscillation?
If yes then the problem coming from somewhere else!
I will lower the P and D gain and run it on the bench without head to see the different in values! what do you think is it better to do it that way?
I flew it today, I see my DesP and P are not tracing each others ! I lowered the VFF and the I to be equal to the VFF, but this happened after lowering the Pith P and D gains !
what I need to do to fix this?
is there low freq oscillation after lowering the P & D gains?
Ozzy,
I took a quick look at your data. The roll axis is still showing the high frequency vibration. It is not as bad but if you look at the RATE message and graph the rdes and r signals you will see how the r which is the actual roll is very noisy. The pitch axis looked pretty good. I don’t remember seeing the low frequency oscillation. So your reduction of the P and D gains must have helped.
So your desired and actual are not tracing each other because you have ATC_RAT_PIT_ILMI set to zero. I thought I had you set those to 0.08? ATC_RAT_RLL_ILMI should be set to 0.08 too.
As far as the high frequency vibrations that we are now seeing. Use the INS_NOTCH_ENABLE. Then set the frequency to 20 and set the bandwidth to 5. That should help reduce the high frequency vibrations we are seeing in the roll axis.
Once you enable the notch, you have to reboot the controller. Then you will see the other ins_notch parameters. Set the ins_notch_freq to your rotor speed in hz. Then set ins_notch_bw to 5 hz. That is the bandwidth of the notch. Lastly make sure that ins_notch_att is set to 30.
I had 3 different flights each one with different blades and P&D Roll setup one time P,0 and D,0 and, one time half value
so tried pretty much everything possible ;(
the last thing I am thinking of is that the new ESP shaft not precision tight, and since its long shaft and the bearing inside the block not tight with the shaft, if you shake the shaft there is about 0.001 play
so maybe this setup for the old 600 ESP not quiet good! and have vibrations issue even if its brand new!
the reason I say that because I replaced everything new.
and I removed the head and spin the shaft and when I touch it with my finger was a vibrating, in my little machining experience its about 0.001 to 0.002 runout
you know that runout in the shaft will increase the runout in the rotor disc and make it worse !
I am going to use my V block tomorrow and check the exact runout in that shaft
oh by the way I checked the blades and they are exact 0 and balanced with equal CG
I can machine my own shaft !! that way I can make sure it will snag fit the bearings!
so much hassles !!
anyway; the good news is that I received the new PIXHAWK 2 with here 2 today from IRLOCK
I am going to install it in my custom made Heli! !
if that will work, I will throw this one away and buy another new one and put it in this heli !!
at lease its good 3 IMU so no troubles regards vibrations!
Yes it has 3 IMUs but only 2 are isolated from vibrations. Even then that doesn’t guarantee that you won’t see elevated vibrations. Don’t get me wrong, it does help but there are a lot of things that go into vibration management. And that is only the high frequency stuff.
The low frequency oscillations are inherent to the stability of the vehicle (design). So the vibration isolated IMUs will not help with this issue.
Yes I think we can move on. I’m not sure how you are maintaining configuration control of your parameters. I am very confused at the moment.
I’m not sure why you were messing with the Roll P and D parameters for the roll vibration issue. I thought I said that P and D gains don’t help with vibrations issues.
Yes I think the INS_NOTCH is helping with the vibrations in the roll axis. Please set the INS_NOTCH_FREQ to 21. The rotor speed you gave me is not matching what the FFT results. The FFT is indicating that your rotor speed is closer to 1200 RPM or 20 hz. So I’m gonna split the difference.
Now here are the values I want you to set for pitch and roll parameters. Please just fly this. I think we are close
ATC_RAT_PIT_D,0.001
ATC_RAT_PIT_FILT,10
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_ILMI,0.08
ATC_RAT_PIT_IMAX,0.44
ATC_RAT_PIT_P,0.01
ATC_RAT_PIT_VFF,0.18
ATC_RAT_RLL_D,0.001
ATC_RAT_RLL_FILT,13
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_ILMI,0.08
ATC_RAT_RLL_IMAX,0.44
ATC_RAT_RLL_P,0.02
ATC_RAT_RLL_VFF,0.18
If this looks good for the pitch oscillations, then I think we can move on.