@flyingdragon Glad to see you are getting back to flying your helicopter.
I would say that it would be worth re-doing the tuning. There is now an Autotune feature for helicopters. It will take some time to read through the instructions and can take 6 or more flights to complete the tune. However, it will tune the gains for you. Here is the link to the wiki for the heli autotunehttps://ardupilot.org/copter/docs/traditional-helicopter-tuning.html
Follow the instructions for “preparing for tuning” then go to the section for autotune.
Follow the wiki instructions for the failsafe https://ardupilot.org/copter/docs/radio-failsafe.html
but I wouldn’t allow it to use any auto modes until you have completed the tuning and checked that it flies well in loiter mode. Please only use stabilize or althold until you have tuned the heli.
I would be careful about the type of materials that you use as vibration dampers. This doesn’t sound like a good idea
Than you Bill, yeah I am back to the hobby… wiped
the dust off my Helicopters and changing the rotor head to 3 blades ( ASYMMETRICAL shape) no old school align bead, I installed very nice scale looking as350 head
Now after installing the new swash and the rotor, I noticed the IM_STAB_col 1, 2,3 and 4 are reversed!
So 1 change the positive pitch value and 4 change is the minimum pitch stick!
In my radio the pitch is reversed but this don’t matter as I tried to make it normal in my radio but still same problem
Dose it really matter.
I can move up and down the stick and the pitch is great!
I set it 0 stick down med stick 0 and goes to high
Pitch degree low stick at 0 mid stick 0 then goes to +12
Thank you so much
This is difficult to diagnose like this. If the swashplate motion is reversed when moving your collective stick then you have a set up problem. I would suggest that you set your IM_STAB Params back to the default values. Then follow the swashplate set up exactly how it is laid out in the wiki. There is even a video. This should help you correct this problem. https://ardupilot.org/copter/docs/traditional-helicopter-swashplate-setup.html
perfect, I am glad everything in the link and easy to follow…
do I need to update the unit firmware to be able to use the autotuning future?
my second Q, since I’M using 3 Asymmetrical blades ( flat from bottom) what is the recommended MID stick to be at?
the Wiki mention mid at - 2 and min at -5 with max at +12
another issue;
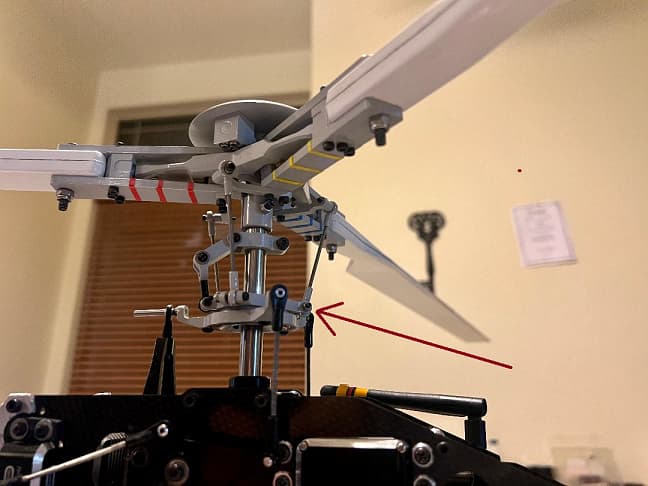
I have about 1mm play in my rotor grips caused by the Turnbuckle Rod Ends, they are not tight enough, the metal balls not tight inside the metal turnbuckle ends, this result 1mm free movement in all 3 blades… I am guessing that the airforce will lift all 3 blades with the same amount so that will not bring vibration issue!
I suggest to replace all of those all “metal” uniballs, they are not reliable at all (referring specifically to the model ones commonly found on scale rotor heads). They have a lot of backlash-as you reported- otherwise they tend to get stuck after minimal exposure to dust.
Get good plastic ones.
You read my mind this is exactly what I did
I just got my new 10 set (m2 plastic ball levers) in my mail this morning, they feel more durable and no movement
I will paint them same as the bead and re-track the blades
Lower the P value as I had same issue with this but I used Felt Furniture Pads X-PROTECTOR in my big size 900 helicopter with my old China made pixhawk and works great
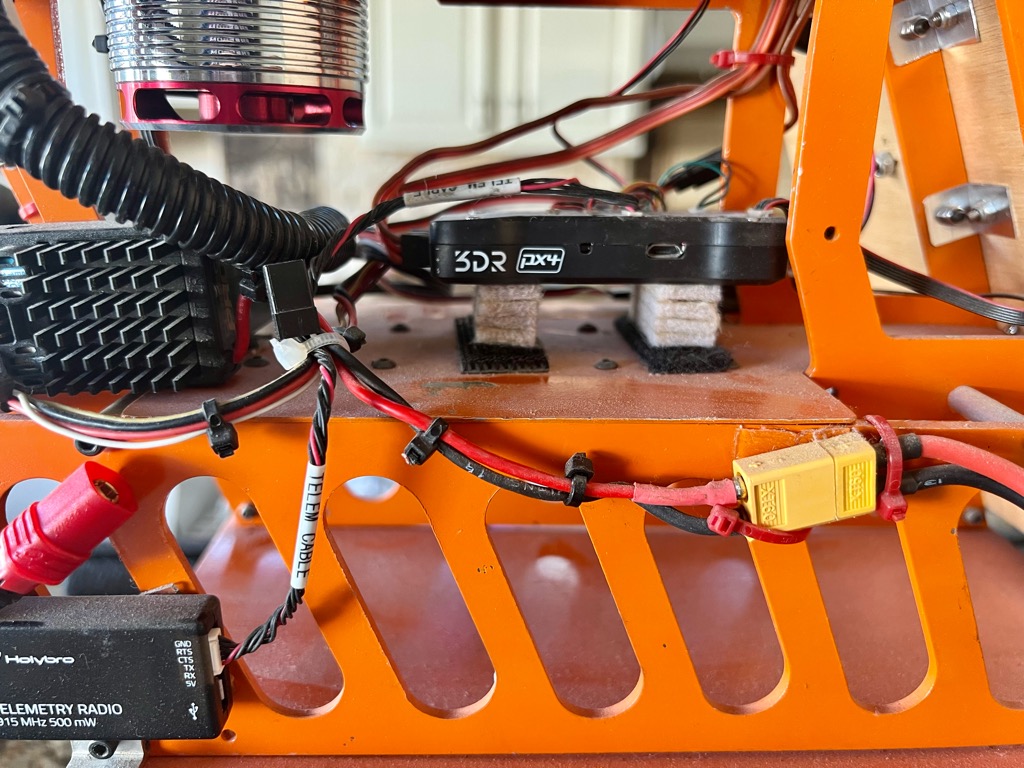
@flyingdragon the version would have to be 4.2 or later. However I would recommend the latest stable version as I had pushed some updates since then. Be sure your controller is firmly mounted as the autotune oscillations can be pretty fast and abrupt. I would recommend checking the mount in between flights to ensure it didn’t come loose.
I think I was able to solve the problems and was able to arm and flip the switch to start the motor!
now with the new updated firmware, its kinda hard to set the Mid max and min collective pitch…
I first set the H_SV_MAN to Min (4) then
H_COL_MIN then set the value to 1600 to give -3 degrees pitch
then H_SV_MAN to max (2)
then H_COl_MAX set the value to 1750 to give +9.3 degrees pitch
then set H_SV_MAN to zero thrust (3)
then H_COL_HOVER 0.5 but this value give me +1.8 is this correct ?
note, I am using asymmetrical blades
note: the H_COL_ANG_MAX 20
H_COL_ANG_MIN -20
H_COL_LAND_MIN -2
H_COL_ZERO_THRST -5
is everything looks good to go?
Thank you
no, according to your measured values it would have to be:
H_COL_ANG_MAX 9.3
H_COL_ANG_MIN -3
H_COL_ZERO_THRST -1 (since you have asymm blades)
H_COL_HOVER gets automatically updated during flight looking at the collective position while flying in non-manual altitude control modes. Likely, 0.5 is just the default value after a fresh fw installation or param reset.
No, it won’t be exactly the same. You may see a little discrepancy but it should not be as large as you are showing. But this all depends on your stabilize collective settings (IM_STB_COL_X)
Bill,
the Max and the min values now better and close the the H_VS
but the Mid stick is +3 and the H_VS_ZERO is -1
now the scary thing happened today, first the heli spins the tail kick very fast to counter clock wise and I re checked the directions of the Rud channel along with the Gyro direction all seams in the right order…
I tried it many times as you see in the Log files but the heli scary spin to almost crashed…
the only thing I can tell here, when I pick the Heli from the head and spin it to right or left the blades should give nice ±Pitch … but its only giving ~ ±3 maybe the tail need more pitch movement to handle the 3 blades?
I just don’t want to fly it before I figure out what is goin on…
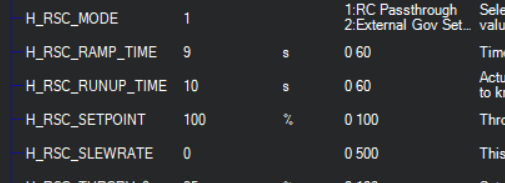
edit: or maybe berceuse I set the ESC Governor to linear not curve… so when I flip the switch the blades instantly go fast… I think in order to have the tail control the main blades need to start slow to fast…
any idea if the throttle curve maybe wrong?
Thank you
first mistake:
H_RSC_MODE should really be set to 2. Having RC passthrough means you will not have the soft start and no failsafe logic benefit from the autopilot in caseof radio loss Then you can increase ramp up times to get smoother spool-up. It would help also having an rpm feedback (i.e. RPM sensor installed and connected to the autopilot).