Ozzy,
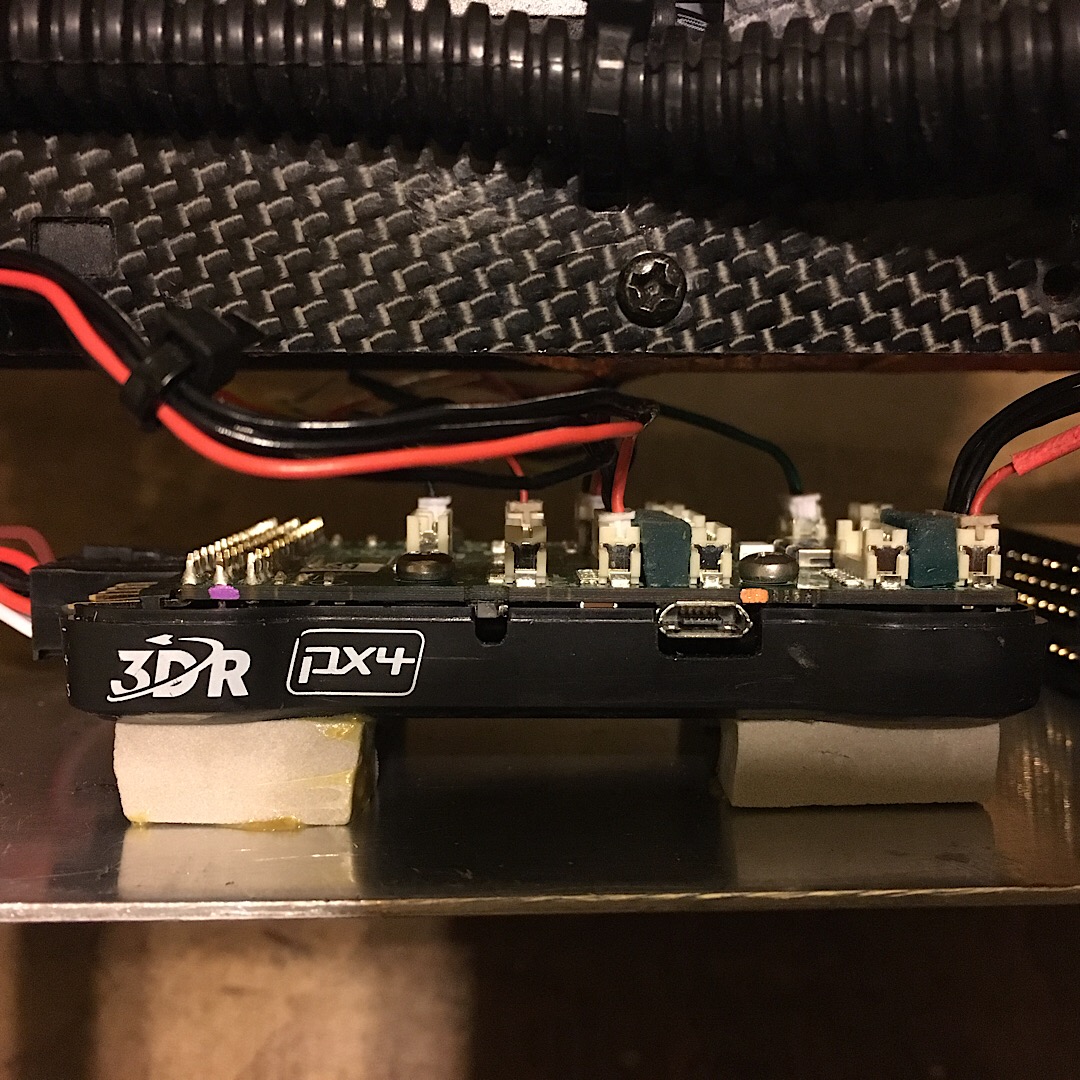
Here is a pic of a pixhawk I mounted for one of my airplanes but it is the same method I use for my heli. Here you see it is mounted to the wood structure of the airplane using the 3M foam tape.
I am definitely going to use that same mount you have and check the result !!
I am about to finish the Swash leveling and the blade tracking …
Hope I can get 0.00 pitch in all blade directions…
Like I post earlier
I noticed when I flew the heli on hover and when I look to the right side of the blades I. Can see one blade is little higher
Only one side the other side ( left) they are equal! So I Lended the heli and put the digital gage on the blade while the blades straight ( blade top toward the noise… the both blades read 0.00 which is great
But when I spin the blade to the side and put my digital gage I start see one aside 0.00 and the other side is 3.3 +
So that is definitely a problem ! Causing the y shake and low freq oscillation become an issue !!
Thank you
Ozzy
I disagree. One side being different from the other does not cause a vibration problem. Did you have H_SV_MAN set to 1 when you did the digital gauge readings? It needs to be set to 1 so that the PID inputs are not being made.
That is interesting that you were seeing them out of track on one side but not the other. So this could cause a vibration issue. You will have to adjust the pitch link on one blade until the blades are passing through at the same height.
Hi Bill, I set the H_SV_MAN to 1 through the Heli setup screen, basically I go to servo mode and click on zero
then measure, also I click max and min to check the pitch value…
I then click to active to set H_SV_MAN to 0 is that correct?
I installed the FC using hard mount sponge and I uploaded the logs for hovering flight in the backyard
just smooth hover, no maneuvers.
Please do you think I still got considerably amount of low freq Oscillation?
I tried my best with the blades but still I see different on the right side between the blades but when I straight them toward the front the reading is pretty much 0 on both.
I am going to try the ceramic bearings and adding third bearing in the boom to support the TT
Thank you so much
Para SEp-09-2019.param (14.1 KB)
I believe you mean high frequency oscillations (vibrations). the changes you are making address high frequency oscillations/vibration. we addressed the low frequency oscillations reducing the P and D gains.
I am sorry yes the high frequency oscillation,
Do you think I need to lower the P and D more ?
Or take the next step and check the other flight modes?
Thank you
Ozzy
The Low frequency oscillations in the pitch axis are not there anymore. So the changes you made to the P and D gains for the pitch axis worked.
As for the high frequency vibrations in the roll axis, the new mount system is doing a good job at helping with the 2/rev vibrations (42 hz). Your 1/rev is still a little high even with the notch filter.
Please make the following changes
INS_NOTCH_FREQ 22
INS_NOTCH_BW 10
INS_GYRO_FILTER 10
INS_ACCEL_FILTER 10
PSC_ACCZ _FILT 10
If you don’t experience any changes in the aircraft handling like seeing low freq oscillations when making pitch inputs, then switch to loiter and give a stable hover, do some low speed maneuvering.
post a log with the stabilize and loiter tests. I think we are getting there. If you don’t mind, could you post a picture of how you mounted the pixhawk?
Great! I think the hard foam worked well!
I used foam that comes with my gyro box years ago, cut it and mount it using contact cement.
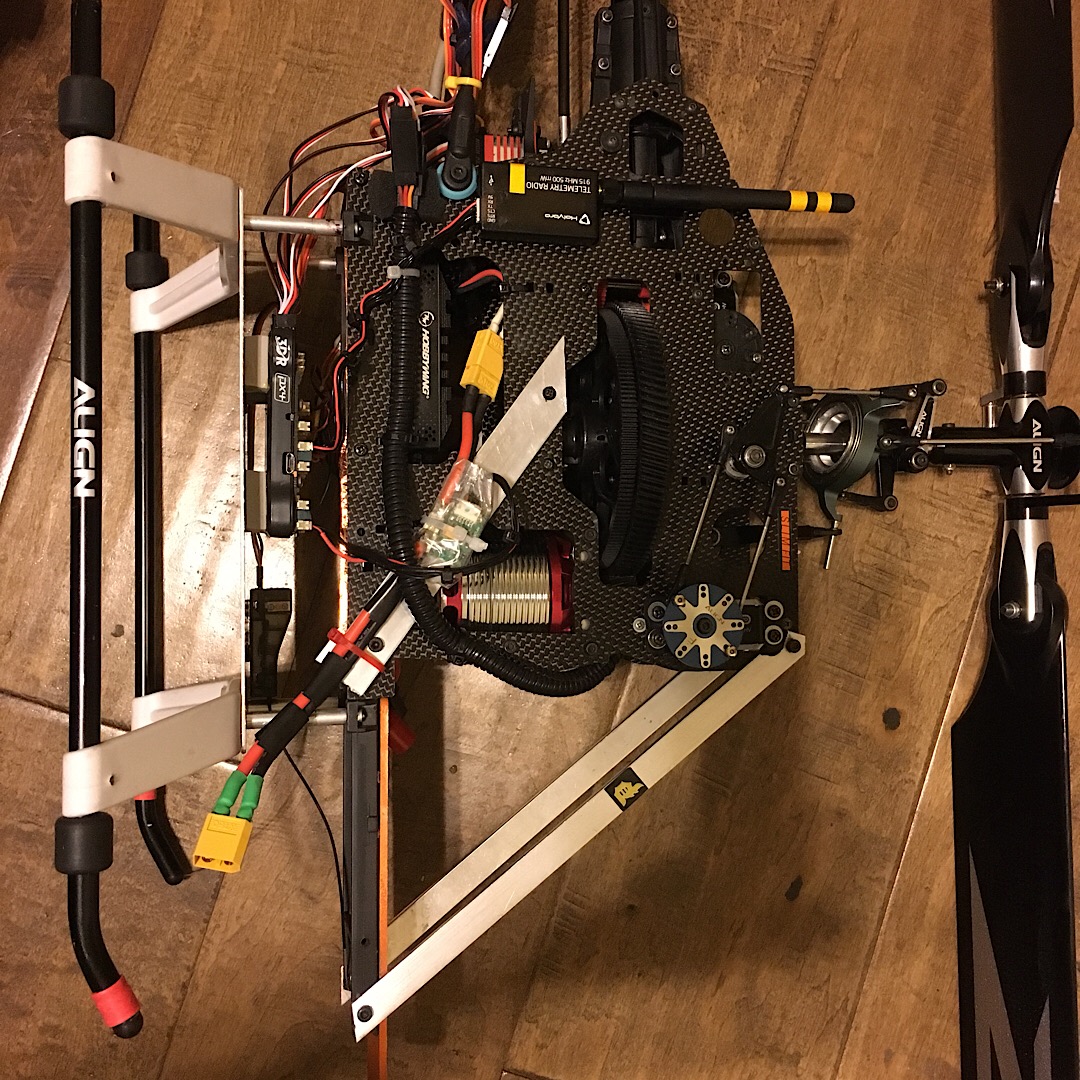
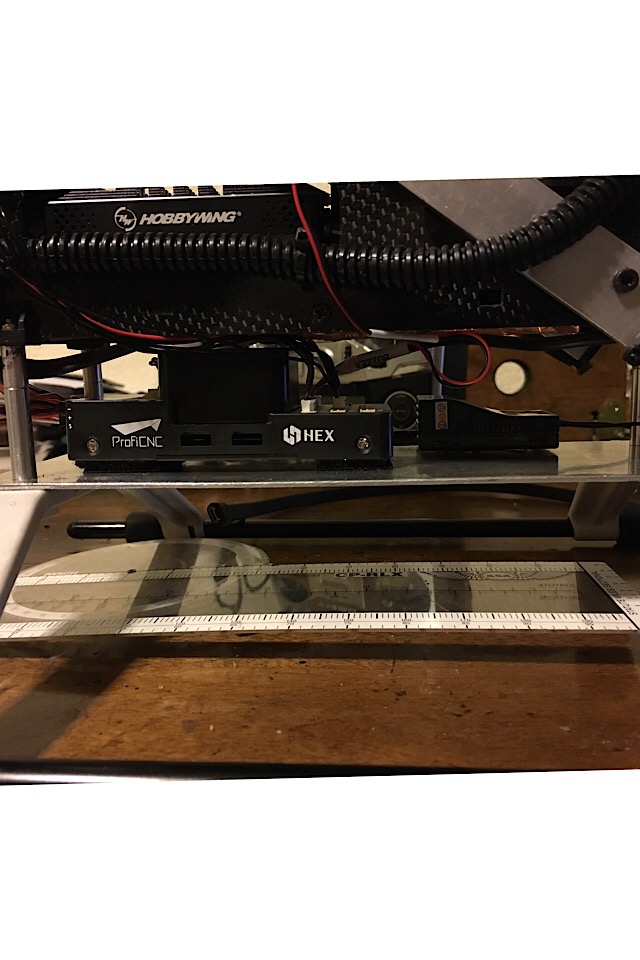
Here is pic of the FC mounted !
I was thinking to place the FC in front instead of the batteries just to see what the vibration will be !
If it’s lower since it will be away from the tail and the tail box ! Maybe!
I will put the values you gave me and upload the logs
I really appreciate your help! Thank you so much !
Ozzy
No. Leave it where it is. the closer to the CG the better.
Hi Bill
sorry I missed your question regard the mount.
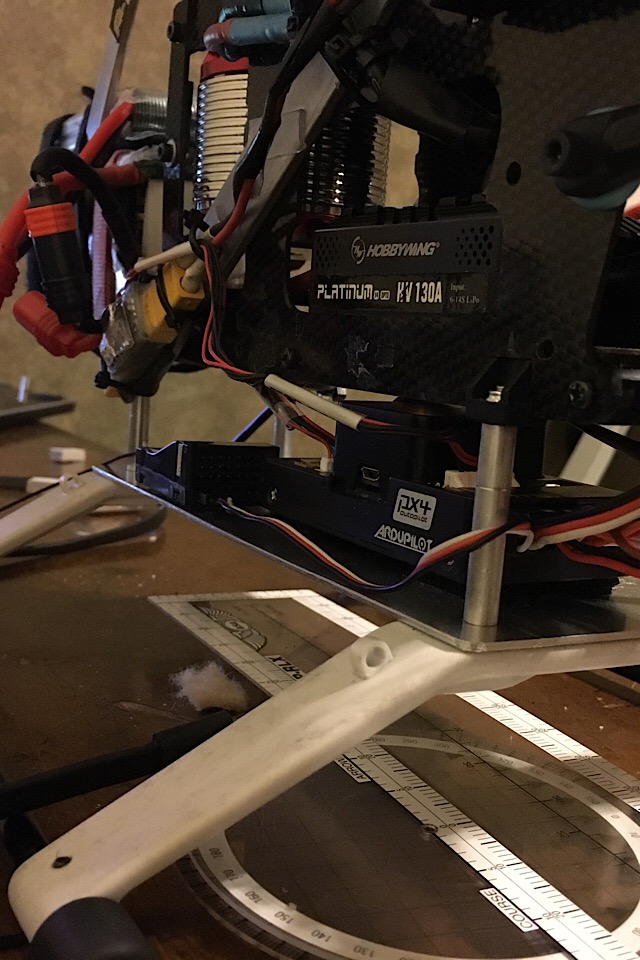
first mount on the early pic you can see I use the pixhawk stock cf plate mount it using velcro then 2 round double side foam that comes with the pixhawk
and then mounted the pixhawk without the box using kysho 4 small mounts…
but that didn’t work very well…
so as you see on the pic after that, I used hard foam plate cut it and glue it using contact cement…
it lower the VIB as I can tell!
so these PIXhawks like to use hard mount not soft…
I flew it today after adding your recommended Parameters…
its fly good but same as before didn’t feel any different…
its still hard to fly little bit…
I like the way was flying when I had my PID high, it was like a robot !! very precise and super easy!!
now its OKy but wish to have it like when it was flying before !!
I switched to loiter mode and it start climb up and even if I lower the stick she want to go up more!! and when I lower it to the point where is lower than the 0.00 pitch, it will start dive down fast!!
so I strike the tail blades!!  they are brand new CF just got them in the mail last week! but it can happen!!! maybe because after re adjusting the blades; need to re-adjust the IM_STAB_COL_2 and 3 again!
they are brand new CF just got them in the mail last week! but it can happen!!! maybe because after re adjusting the blades; need to re-adjust the IM_STAB_COL_2 and 3 again!
I ordered another set, for now I am going to use the old pear I have, will not put any new blades till I make sure it will fly good!
here is the both logs and bins for both flights
the first flight and I loosen the main blades little bit on the second flight, where is the crash happened
thank you so much
paramters Sep-10-2019.param (14.1 KB)
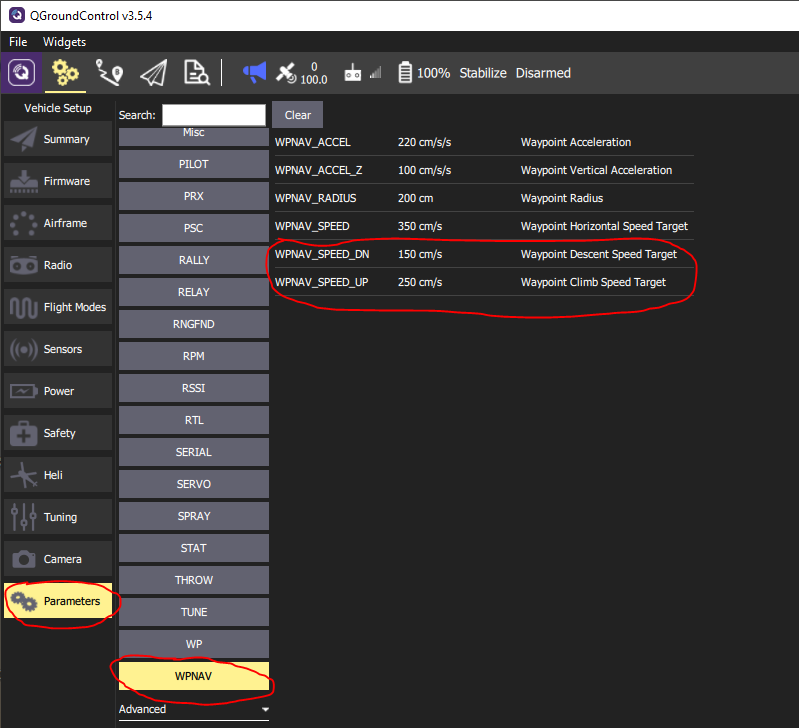
What is your waypoint speed up and speed down parameter set to? Seems like you have yours set way too fast.
Also, when you switched to loiter mode, you had your throttle stick at 50% correct?
Hi Chris,
Where is the waypoint parameters ?
Sounds link I never touched them !!
Yes when I switched to loiter I was at about 50% throttle
Just stable hovering where is the heli stand about 6 feet of the ground
Thank you
Ozzy
I’ll look but I doubt that was the issue. I really think there is something odd happening with your baro altitude. I should know more once I look at the log.
Ozzy,
So good new is that the INS_GYRO_FILTER has helped more with the high frequency vibrations on the roll axis. It looks really good. Now you mentioned that in stabilize the aircraft doesn’t feel precise or easy to fly. This is because we have the adjusted the requested response to be super fast so with these settings it will look jittery and won’t feel smooth. The feel of the aircraft in pitch and roll in stabilize mode is adjusted through these parameters
ATC_INPUT_TC
ATC_ACCEL_P_MAX
ATC_ACCEL_R_MAX
ATC_RATE_P_MAX
ATC_RATE_R_MAX
Here’s what I suggest you try while we figure out this altitude hold issue. Fly in stabilize only with these settings
ATC_INPUT_TC 0.25
ATC_ACCEL_P_MAX 52000
ATC_ACCEL_R_MAX 52000
ATC_RATE_P_MAX 0
ATC_RATE_R_MAX 0
The INPUT_TC will give a little slower and smoother initial response to your inputs. the aircraft should feel less jittery as you are making inputs. Setting the ACCEL_X_MAX parameters lower will also slow the response over the longer term. So you can adjust these more. I wouldn’t suggest taking the ACCEL_X_MAX parameters below 40000 and I don’t suggest taking the INPUT_TC much above 0.3. I don’t think the aircraft will feel responsive enough to your inputs at those values.
Now regarding the loiter mode flight. I think there is something wrong with your baro sensor in your pixhawk 1. Here is a plot of the baro altitude from your pixhawk 1
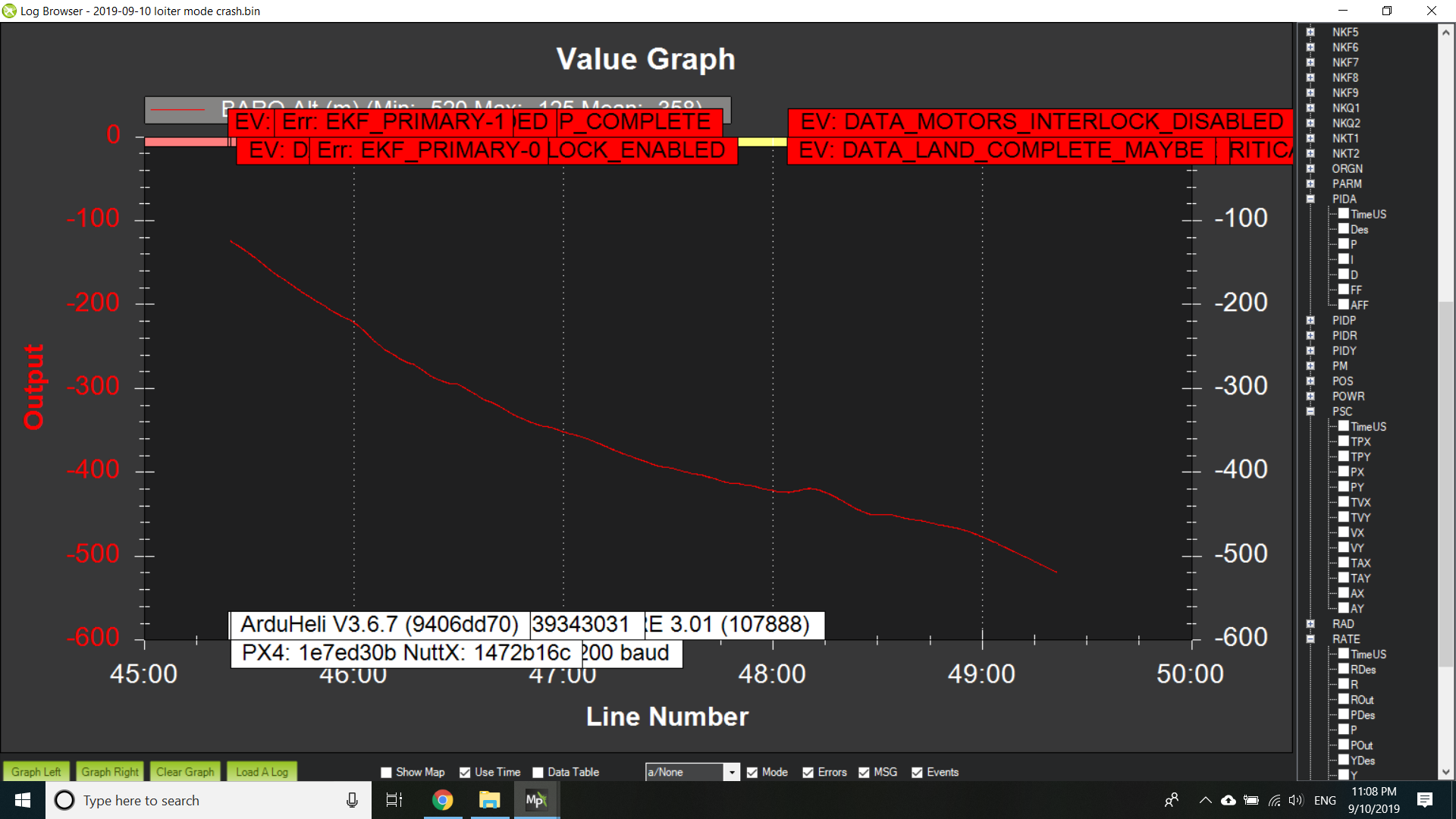
Notice how the altitude continues to go down and the values are in the hundreds. The units here are meters. So the sensor is saying the aircraft is descending quickly.
Here is a plot from your pixhawk 2.1
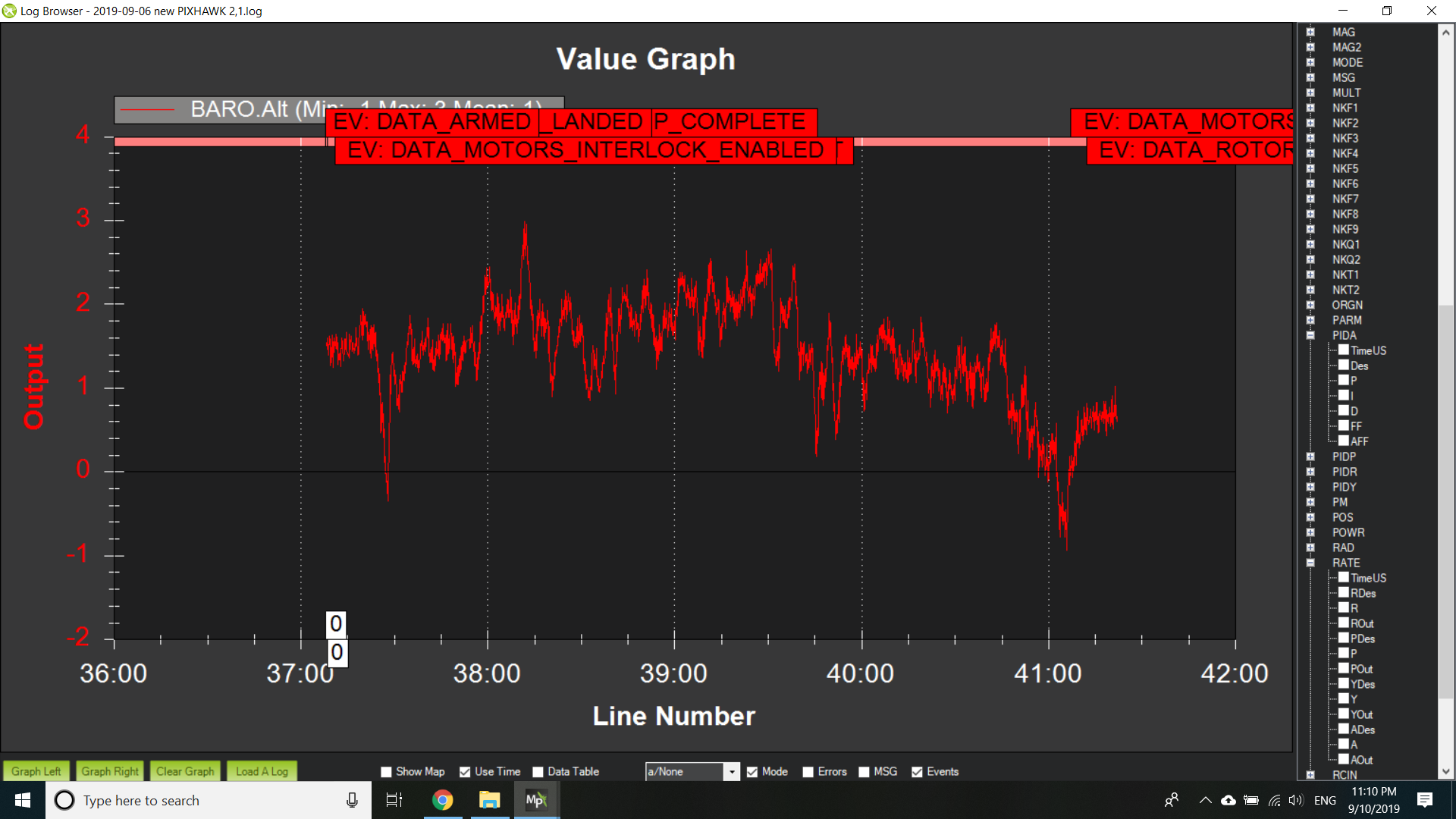
This is what you should see if the baro altitude is working properly.
So I think the reason your saw your aircraft climbing quickly was because it thought it was descending. Sorry about the bad news. I don’t know if there is a way of fixing the baro altitude.
Bill, thank you for the detailed explanation! And the pics That is really help me understand the situation more!
Chris suggested to lower the waypoints…
I appreciate his replay, he just uploaded pics showing how to adjust these values…
Do you think we can fix the loiter issue by adjusting these values ?
If not, I can swap the old pixhawk with the new one !! Since I never worked with the new helicopter yet its still laying down here!
I can put the 2.1 and copy the new filtering and everything and fly it to see what is the different !
If my waypoints parameters are ok and don’t need to play with them …
Thank you so much to you, Chris and Fred for the big help
God bless you all.
Ozzy
No, I don’t think that will fix the problem because your parameters are the same as everybody else’s. They are the default values.
If you want to continue flying and complete the tuning of this helicopter then that would probably be the best option.
Yes, you can copy over the filtering and PID values to the other pixhawk. Let me see a log file for a flight in stabilize mode before moving to loiter.
Hi
I installed the new FC, I was not able to use the thick gray foam because the new FC is bigger than the old one and the cube can touch the top! so I used Velcro to mount it there ,
I see more vibration than the other unit! its surprising me when the manufacture announced that this is way better than the old unit regard the vibration… and some people says you can mount it without using foam or any thing!!
but its not really!!
here is the logs, is there any other way to reduce that vibration ?
Thank you
Ozzy
pixhawk 2.1.param (14.1 KB)
Ozzy,
I have to say I am not a big fan of using Velcro to mount a flight controller. Even using a thin piece of double sided rubber/foam tape is better than Velcro. Just my 2 cents.
I can extend the spacers and make the areas bigger, but it will flex and will vibrate more!
I will try small foam see if that will help or maybe put kysho tape but still 5mm high !
Will see how the unit will do
Thank you so much