You don’t have to change it. I haven’t even looked at the data yet.
The double sided tape I am referring to isn’t even as thick as the velcro you have there.
You don’t have to change it. I haven’t even looked at the data yet.
The double sided tape I am referring to isn’t even as thick as the velcro you have there.
Since your flight controller is basically getting sandwiched between your mounts, you might benefit from a strip of velcro or double sided tape on top of the flight controller too (the “cube” part). The Pixhawk 2.1 is more top-heavy than other flight controllers, so the excess vibrations can be coming from that.
Do you really want to have the cube in contact with the frame? I don’t know but where is the IMU isolation at. is it the interface between the cube and the main board or is the isolation internal to the cube? that is my only concern with this suggestion.
Cube is internally damped. The cube casing is rigidly mounted to the rest of the controller. So if the main part of the pixhawk is rigidly mounted to the frame, then so is the cube. There’s a large moment arm from the imu to the mounting point. What I’m imagining is happening is that the velcro is too soft and the top heaviness is making the whole controller wobble. This is exactly why the designer of the pixhawk cube highly discourages the use of soft dampeners. If we constrain the top of the cube to limit the wobble, we may be good. It’s worth a try in my opinion.
I think the problem with the frame itself,
I was able to twist the frame left and right easily when the heli set on the skids
Also if I twisted like fish tail it shake also
And that Because the spacers (35mm) long can make the frame more flex
When the blades rotate it will transfer the vibration to Y axis and make the bottom shake more !
I wish I can place the FC in front where is the batteries
But the problem with the CG; the heli will tip back as the tail will be super heavy !
I am thinking of mount it on the side of the frame but how to calibrate the FC if I do this ?
Thank you
Ozzy
What about putting back where is the Hobbywing ESC now ?
I tried that location before with my old FC long time and was interfering with servos !
But it’s more ridged than the current one
Thank you
Ozzy
You can calibrate the flight controller if it is mounted sideways on the frame. I believe it has a way to determine it automatically and you could also set it with one of the parameters. I’m sure you can find the set up information in the wiki. It is discussed here
I am not sure but I remember to have seen a note somewhere that the cube cannot handle to be mounted on its side like the Pixhawk v1 could. I believe Chris Olson found that out. Not sure. But if you have time I would try it to see the outcome.
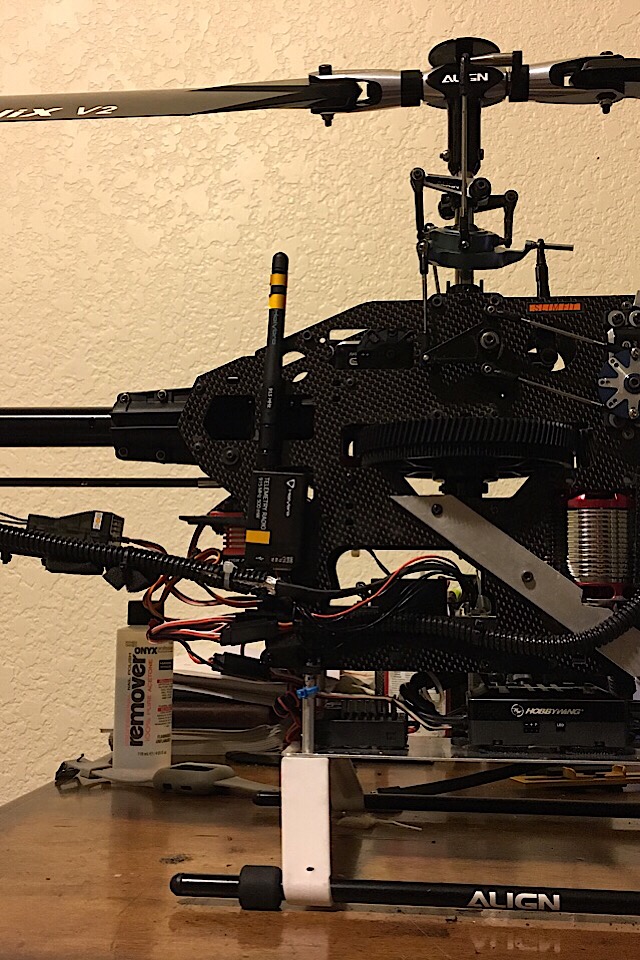
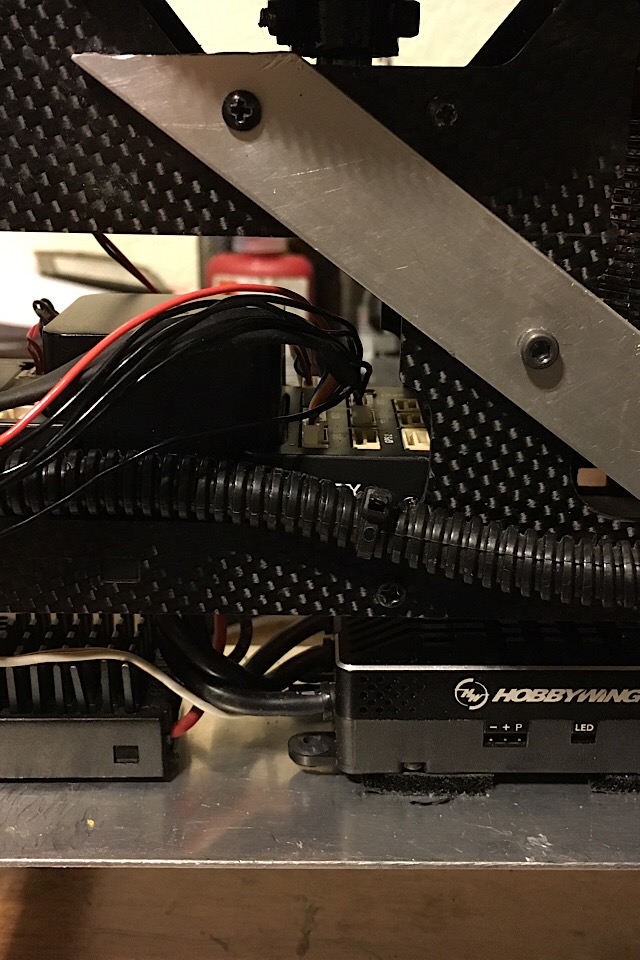
Guys, I mounted the FC inside the frame… using double side 3M tape only, just two pieces front and back of the unit, no movement …
the test was with few Check mag field problems because its close to the motor and the tail servo…
but what I see from the VIB; it went down to 5!!
but I just don’t know about the other (RATE) if its still problem or not!
I am thinking maybe using little softer mounting tape to give it little movement ( like double side thin 3M foam) ( I see at the HOME DEPOT they got white double side foam tape to attach mirrors to the wall!
maybe I can get it better in the (RATE P and R )
here are the Bin and the LOGs
Thank you so much
Ozzy
Ozzy, you shouldn’t get any mag field problems. Because you should not be using the compass in the pixhawk. You should only be using the compass in the GPS unit
Oh you right! I forget that !
Maybe because I was close to the grass and was so wet ! That was the only thing I am thinking about, once I take the heli inside no mag problems at all!
But what do think is it better location regard the vibration ?
Thanks a lot
Ozzy
Where did you calibrate the compass is inside or outside?
I calibrate it outside, before I mount it in the heli
the offsets X:120, Y:45, Z:22
is that 120 is high?
I can take it out of the heli and re calibrate it if its not good .
Thank you
Someone correct me if I’m wrong but you should do the calibration while it is installed in the helicopter. It needs to be able to characterize your mag field produced by the helicopter so that it knows how to calculate the true magnetic heading.
Chris
I will calibrate the heli whiteout taking the FC out today maybe I can get better offsets numbers
But my question is; do I need to do that every-time I change the location of the FC?
I know that FC’s GPS is disable and the external GPS is the one active, so I don’t need to calibrate Compass every time I change the location .
But the gyro maybe effected since the location of the FC change !!
But I think as long as heading to the front and no change in the direction then we should not need to calibrate it either!
Thank you
Ozzy
If I were you since you are learning, I would redo all calibrations every time you move the FC. It doesn’t hurt anything to redo things. Cutting corners is not something you should be doing since you are constantly having trouble. Helicopters in general are not something you can be lazy or sloppy with.
I totally agree!
Trust me without your guys, I can’t go one more step !!
You are a big help !
I will recalibrate it…
Just want to ask about your heli,
I know you use gasser heli and the gasser helis have more vibration than electric
How you control that vibration ?
I also see you use electric helis too
How you mount, where and what do you use to damp the vibration ?
It will be really helpful to me and others want to learn how to deal with this ghost ( vibration )
Maybe you use different components in the heli ?
I replaced everything in the heli and still have vibration !!!
Edit ;
Can you please if you don’t mind post pics of the good vibration level and the (Rate P and R) so I know what a good vibration level is, and what a good RATE att P and att R are good to compare with daily tuning?
Low frequency oscillation and high frequency
I appreciate your inputs
Ozzy
Ozzy,
You missed some settings when you transferred to the Pixhawk 2.1.
INS_GYRO_FILTER 10
ATC_ANG_PIT_P 6
INS_FAST_SAMPLE 0
INS_LOG_BAT_MASK 1
Your altitude looks good. I would say you can make these changes. Fly in stabilize to make sure it feel ok. By the way what did you think of the lower Accel and higher input_tc values.
After you fly in stabilize then you can try loiter.
Oh yeah I forget those changes
I will change them and fly it with Stab and loiter
After lowering the Accel and higher input_tc value the heli was better but still fast respond touchy little bit.
If I was not experienced pilot, new pilots may get lost with the direction when it turn in front of the pilot ! And since it’s sensitive to the inputs; will end with crash …
Thank you
Hi,
after changing the values;
INS_GYRO_FILTER 10
ATC_ANG_PIT_P 6
INS_FAST_SAMPLE 0
INS_LOG_BAT_MASK 1
I flew the heli and it was good.
I don’t know if the vibration is still there?
I replaced the double side tape to the one that comes with the Pixhawk (3m thick hard foam )
I really had a hard time to calibrate the compass ;(
I tried over 25 times outside home, same locations I used to calibrate my old pixhawk
but this one refuse to give me a good result!
best I could get using the QGC is on the beginning of the green bar!
and I didn’t like it because the X: 420 something like over 400 as I remember !
and I re-calibrated the compass thinking things will get better, but now the best is on the yellow bar and most of the time on red!
its just frustrating! I know there is interfere but with what?
everything is aluminum even the compass cable I warped with aluminum tape! and away from anything!
just the metal screws that hold the mast and the little screw holding the round aluminum plate that the GPS set on it!
maybe the screws! but what I will have to use if I need to remove them! and why the old pixhawk GPS was super easy to calibrate and I had low offsets numbers!
please correct me if I am wrong…
thank you for all the time you spending with me to make it happen!
Ozzy
sep-14-2019.param (14.1 KB)