DO NOT switch to loiter or altitude hold if your throttle stick is ANYWHERE BUT around mid-stick.
If you are not holding a hover at midstick then adjust the parameters Bill is telling you to.
You want STABILIZE hover to be at center throttle stick.
DO NOT switch to loiter or altitude hold if your throttle stick is ANYWHERE BUT around mid-stick.
If you are not holding a hover at midstick then adjust the parameters Bill is telling you to.
You want STABILIZE hover to be at center throttle stick.
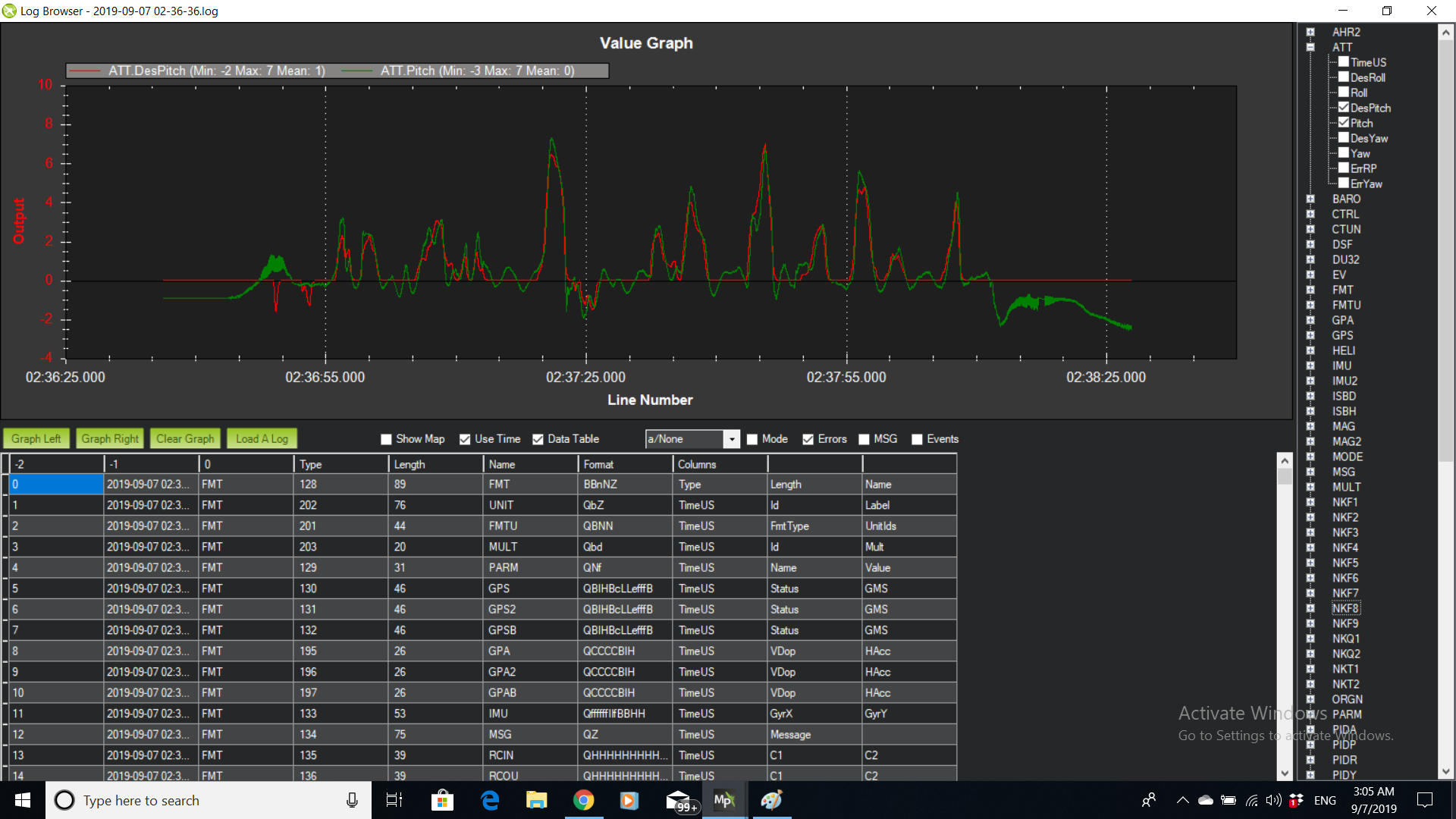
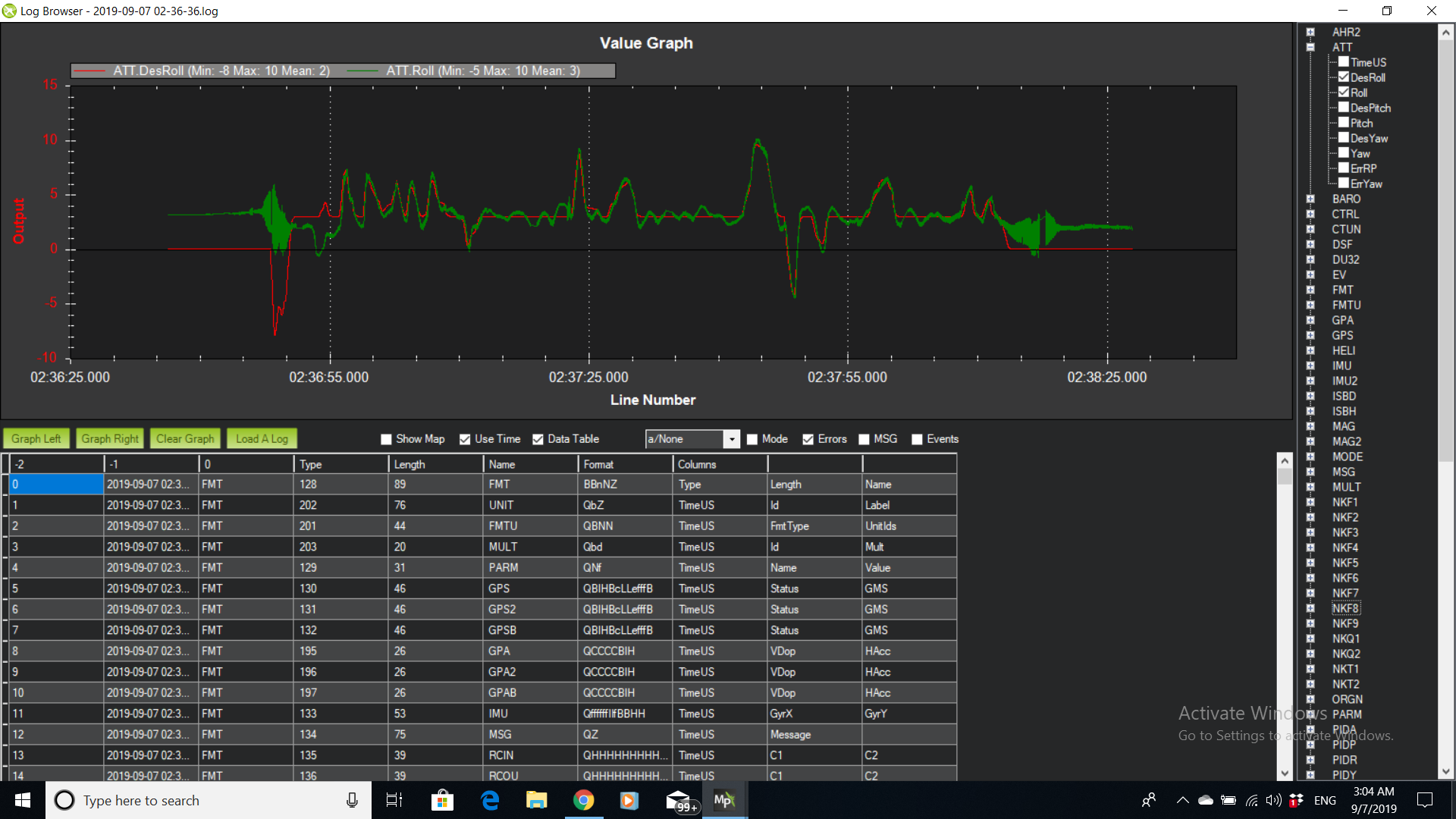
I finally got around to looking at the status. Everything is looking better with pitch following the desired pitch. I think we could change some of the filters to help reduce the noise in the Roll axis. Change the INS_GYRO_FILTER to 10. At this point you may consider increasing ATC_INPUT_TC to maybe 0.2. this will help the aircraft to be able to keep up with the requested changes from the flight controller by slowing down how quickly the requested change can be. You may also consider reducing ATC_ACCEL_P_MAX and ATC_ACCEL_R_MAX to 60000 and see how that feels from a piloting perspective. Right now the aircraft can barely keep up with the requested changes from the flight controller because of the inherent lag in the helicopter response. So slowing the requested changes helps the aircraft to keep up with the flight controller.
I was looking at your altitude and it doesn’t look right. It seems to drift more negative as your flight continues. I don’t know what is causing this.
I also looked at your PIDA message and there seems to be some noise on the measured acceleration. So I would setting PSC_ACCZ_FILT to 10 and also set INS_ACCEL_FILTER to 10.
conduct a hover in stabilize and make sure everything feels ok and you are not seeing any low frequency oscillations. then switch to loiter and see how the altitude hold is doing.
In loiter there is some low frequency oscillations going on there. It is acceptable that the aircraft may wander around in loiter but you shouldn’t see any large (2-3 ft diameter) circular motion over the ground. I have to get more familiar with how to tune the loiter mode. So I’m not much help here.
Chris, thank you for the input ! I found my mid stick to be around 40%
And learn to leave it there when I switch between the modes
bill, I appreciate your time guiding me to get this heli done!
I tried the values of STAB_COL _2 and 4 to 400, 600 but the heli landed at my 45% stick
And I had to give it more collective to keep it up!
Sounds like the right setting for my case between STAB_COL_2, 480 and STAB_COL_3, 550 to fly on loiter mode with very slow rate of landing or climbing up!
Now regard the noise you see, I think all the problems comes from the oscillation of the main gear bringing to the frame! I did every single method to lower the frequency oscillation but still when I open the RATE and see the R looks more noisy than P
and that old pixhawk IMU can’t Take even little vibration !! It’s problem when it comes to Helicopter, since it’s have more oscillation than drones
So what I did is swap the old FC with the new one 2.1 and left my other heli with pending order ( I know will cost me more $$$) for both helis but hey… We been fighting a ghost !!
So I installed everything and copied most of the parameters we had setting up…
Left the PID to the stock values ( pretty close to the old pixhawk setup that we did )
But I will double check the PID tuning again since it’s different IMU and upload logs to see if the frequency oscillation will be reduce to the acceptable level …
I think that is the problem regard the loiter oscillation you see in the logs
So you think to keep the filters as is or change the R filter and gyro filter to value you asked me to change ?
I hope we will win the battle with this and make this heli fly as supposed to !!
Thank you so much for your big help!
You and Chris done all the efforts to help this community and people who seek help like me…
Ozzy
This does not make sense.
Mid stick means 50%
If what you mean is your helicopter hovers at 40% stick, then you need to change STAB_COL 2 and 3 to get your helicopter to hover around 50% stick.
Another thing that is odd is that your helicopter should not be going up or down when in Altitude Hold or Loiter mode if your throttle stick is between 40-60% (there is a deadband - unless you changed that parameter).
Ozzy,
the vibrations you are seeing are not from gear mesh. From my experience vibrations at 1/rev are mainly a rotor imbalance and the ones at the number of blades/rev are due to vibrations created in the blade rotating frame (rotor dynamics/aerodynamics) that are transmitted to the fuselage at these frequencies (n blades per rev). I believe the vibrations are more noticeable in roll axis than in pitch because for traditional helicopters the roll inertia is much lower and so accelerations imparted by the rotor system are able to excite that axis more easily.
I disagree. the loiter problem has nothing to do with the vibration issues.
Yikes! another change but probably a good one. It will be interesting to see if the vibrations still persist. Hopefully this altitude issue goes away. I would hold off on changing the filters until we see what things look like with the new controller. Hopefully you are keeping it in the same location as the pixhawk 1.
You’re welcome. It helps me see what other set ups look like.
Hi,
I just replaced the system with the 2.1 and extended the GPS cable , I isolate the cable with aluminum to protect it from magnetic and electronics interference…
did all the calibrations… etc…
copied most of the parameters but I changed the PID to 0 just to see the new FC behavior!!
after hours of installations, I had my first flight and after downloaded the logs; I saw the vibration over 10 and the RATE R was a thick wave and not so good!
I rechecked the white dampers and I found there was an amount of play in the head!
so I replaced the dampers with medium soft (align stock original) and tested and downloaded the logs!
I can tell that the new FC didn’t make any improvement !! even with PID 0 I was hoping to see the new technology and the new IMU’s doing better! but I didn’t!
I maybe wrong so I uploaded the logs here. Please correct me if I am wrong… I feel I waste time and $$ by swapping out the old one that I believe is much better regard the Vibration level around 5 for the Y axis even with the white dampers that gave me over 10 value with the new 2.1
I have feeling that if I could replace those white dampers before I replaced the old FC I could achieve better result !!
any idea how to fix this long issue and get rid of the freq oscillation ?
its almost a month now with not really what I was thinking of!
its hard to have a hope and see no improvement after all that time and money spent!
I almost replaced most of the Heli parts! even the servos!
I appreciate all your help
Ozzy
paramters no PID new pixhawk 2.1 Sep-6-2019.param (14.1 KB)

Ozzy, I am sorry to hear that vibrations didn’t get any better with the new FC. I have not looked at the logs but I will when I get the chance. I know this can be very frustrating. I have been doing this for 3 years looking for ways to improve tuning by reducing the feedback instabilities but am still trying. This is different from your problem.
The high frequency vibrations can be difficult to isolate. Full scale helicopter manufacturers are faced with the same issues and many times it comes down to placement of the sensor. The structure where the sensor is mounted can magnify the vibration. That is why we want to mount it to a very rigid structure on the heli.
I really don’t think the dampeners would have made a difference. I mean maybe softer ones would help some but that goes against my theory that stiffer ones help with tuning.
Nothing comes to mind that I could say would be a sure fire fix. You are in the category where the harmonic notch filter would be a big help.
So we can continue tuning with the new set up and finish up. The tune maybe limited due to the vibrations but I think we are almost there. The tune should be good enough to fly loiter and auto missions.
I appreciate your help! Sometimes I feel I am giving you a hard time! So sorry about that!
Just wish I can get it to fly like Chris’s heli or other pilots who successfully Get it done!
In fact Chris heli is gas and you know these gassers helis have much more vibrations than the electric once!
And when I look to his PID values I see he got them high enough with no oscillation problem!!
Could be because his heli design or because he properly mount the unit with special material?
I know that trex 600 esp with longer shaft can cause more vibration but the shorter shafts like DFC design will help get the CG closer and lower everything to be more tight and rigid !
Just my thought! I am
Not engineer, I fly full scale planes but not helis so my info is very limited regard the heli flying dynamics
I can copy the PID values from the old pixhawk parameters and use them with this one and test flight ?
Or re-tuning PID which one you think is better ? If you look at the new logs I posted early today you will see the vib and you can see how it’s higher than the old unit .
Oh by the way, when they introduced this new pixhawk 2.1 and they added the anti-vibration technology by using 3 isolated IMUs why we still see greater vibration than the old one ? Could be my new 2.1 unit is defected ?
That is telling me the new pixhawk is no different than be old one ! Just by Extra $$$
Thank you
Ozzy
Bill, sorry for my so many changes and questions !!
If you believe there is no improvement with the new FC, I can easily put the old one back and save space as the old one fit nice
The new one kinda tight in place
Thank you very much !
Ozzy
Ozzy,
I was worried that could happen when I was reading that you are going to install the cube. That was the reason why I took the cube out and replaced it with the Pixhack v3x. which Chris is using for his gassers.
Their internal dampening is better suited for Helis than that inside the 2.1 pixhawk.
Don,t get me wrong it is possible with the 2.1 just more difficult to mount. My scale Jetranger(TR700) is flying perfectly fine with the cube. But not my TR600 stretched!
Is there reason why the trex 600 have all that VIB ?
Do you think because the shaft is thinner than the 700? Or maybe the design of the head with only one screw not rigid enough ?
I tried everything by replacing everything !
But still there is a lot of vibration and I feel the head is shaking !!
I took the head off and the tail completely off
The vibration was 4
It supposed to be less around 1 or 2
So when I touched the shaft I can feel vibration!! Not good shaft
I am most positive that If the shaft or the bearings are tight, I should not feel anything moving !! That how the tight matching is!
If I turn a shaft in my lathe after few cuts and grinding I can’t feel the shaft is spinning anymore !
So my question is that if we use dfc head with dfc shaft and dfc bearings block do we still get this VIB? That is if the new 600 heli have a better shaft!!
It’s problem! With no solution …
Now in your case with the 700, maybe they make better quality shafts there! I have couple of 700 bearings for the blocks and I can tell they’re better than the 600 bearing blocks
Thank you
Ozzy
Ozzy,
That is up to you. If you don’t want to buy another pixhawk 2.1 and just use the pixhawk 1 in your other aircraft or swap the 2.1 out with the pixhawk 1 in this aircraft. Its up to you. Like Fred, I’ve been moving my aircraft to the pixhack. I bought a PIxhack V3 to replace an older pixhawk 1. If you choose to keep the pixhawk 2.1 in this aircraft I would load up the PIDs that we’ve tuned for the pixhawk 1 and fly them. I can look at the log and we can go from there. I would suggest implementing the filtering that I proposed.
I think I will keep my old one in my trex 600 it’s just not getting better with the new one
I can save space and money buying another one !
I am going to put it back today and put your last filtering values you gave it to me in your previous post and report back with the loiter mode.
It’s really bad that these grate flight controllers have a very sensitive Sensors
Sorry about my changes, trying to test everything possible to get the best !
Thanks a lot!
Ozzy
It is not the sensor itself, it is how the FC is mounted. I had the best values when my old Pixhawk 1 was mounted on its side at the center of the frame of a Helicopter. But it is not always possible because lack of space.That was a RJX520 Heli. I lost it after a bad crash. In my TR600 most parts from TR 700, the motor and the main gear as a sample. The one way bearing fits in theTR700 main gear. I use on both Helis ceramic main shaft bearings. I am telling you this if you are interest what I did. But my idea was more to give the motor most power. That is why I am also using DDVP Tail. MY TR600 is a very heavy aircraft with all the photo gear included, 10000mAh 12S, 20 min flying, 9.36kg.
You just have to try and find the right way of mounting any FC to get it happy.
Editing this post because I mixed up a time in my 70 years old head,
I have build a Hexacopter recently and ECALC gave me a flying figure of 22 minutes for that setup I build.
Have not flown my TR600 a total 12S pack for weeks and I just checked my timer in the TX it is set to 12 minutes flying time.
Sorry Ozzy for that mistake. You did believe that. Again Not 20min. but 12 minutes flying time of the TR600.
Fred sorry to hear that you lost your heli! I am sure you replaced it with better one!
I use align m1 110T slant gear, its same like the 700, but my hub I machined to fit that main gear! as you know the KDE is discontinued
if you use 12mm shaft then you maybe replaced the bearing blocks to fit that shaft which is the trex 700 bearing block!!
basically, if one part in the head change then all the baring blocks, shaft, main gear, hub, one way bearing and the auto rotation gear all must be change to 700…
you said you was flying it for 20 min? What setup did you used? motor KV, poles, pinion, main gear etc…?
do you have pic of the FC where you was mounted?
sounds like I need to copy your build!
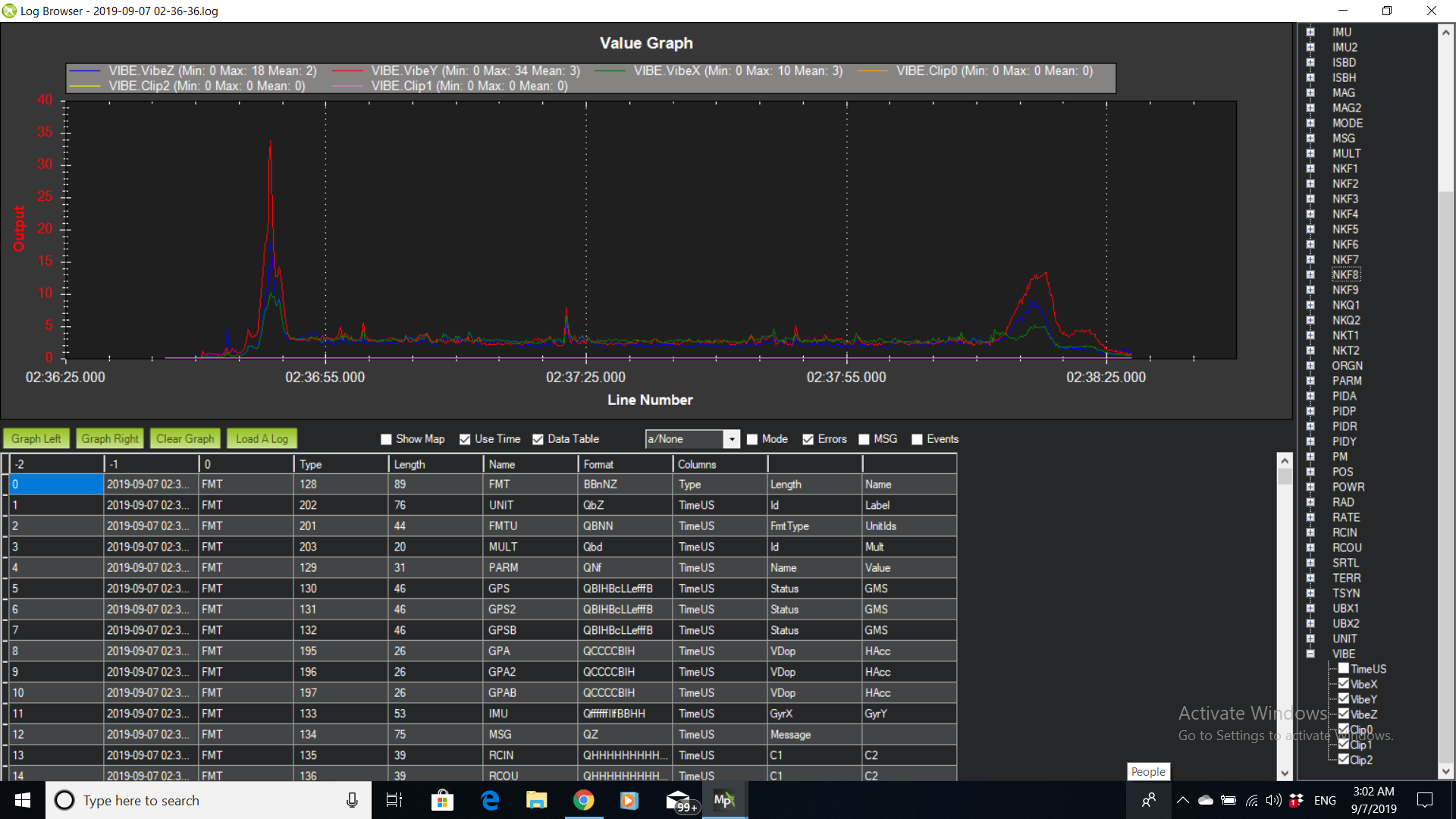
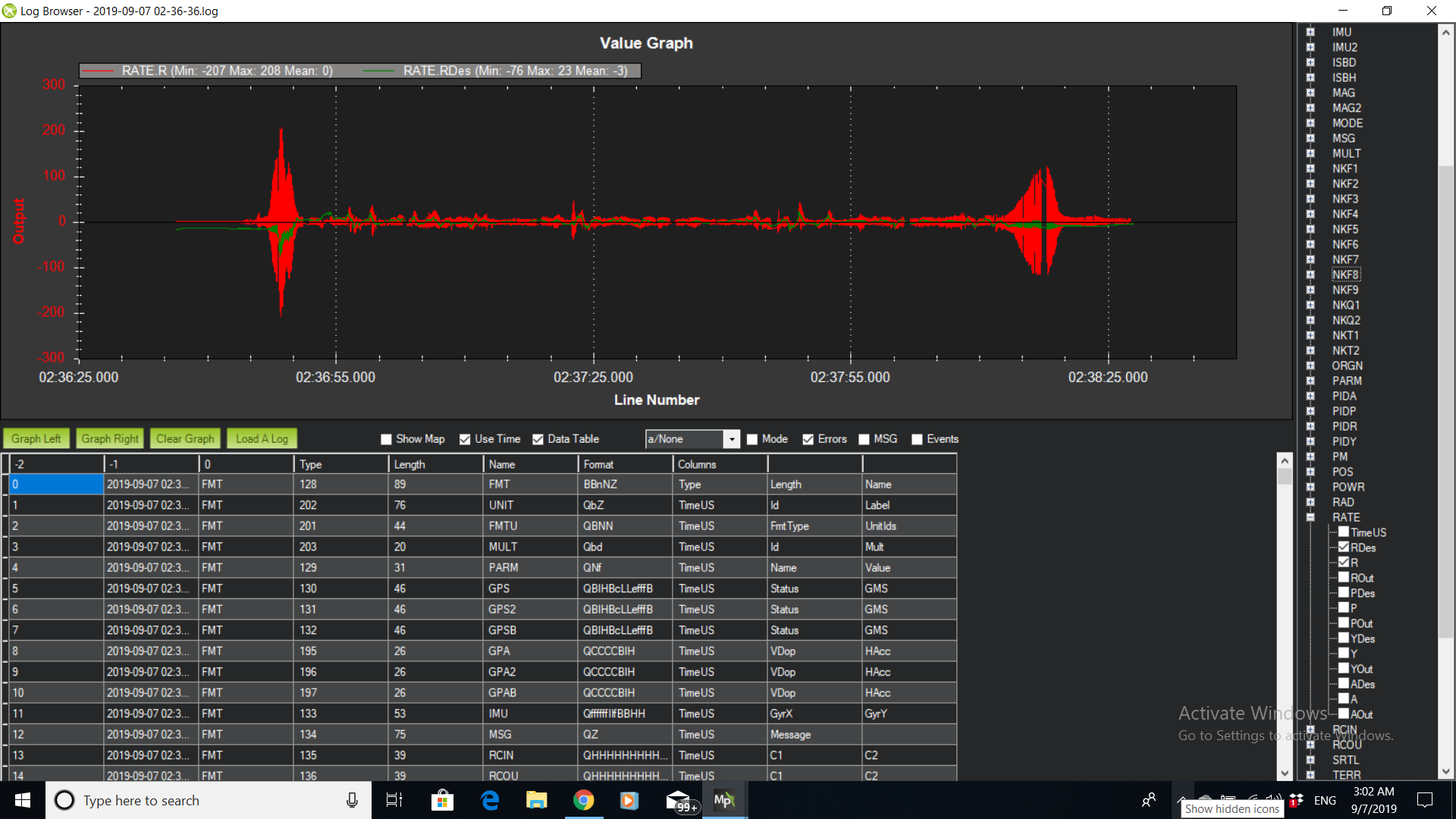
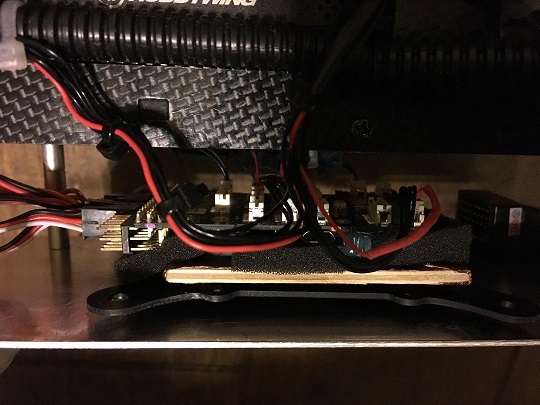
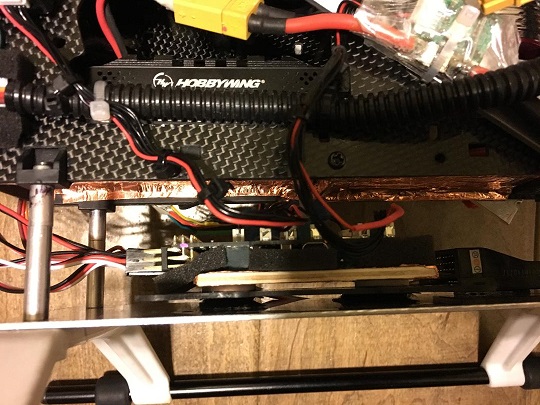
I tried every possible way using all kinds of mounting materials and methods, and locations but still facing problem with the low freq oscillations
today finally I was able to lower the Vibration today by using velcro on the bottom of the plate and that lowered the vib to 3~4 but the RATE is still don’t want to go down! :(
here is few pics of the logs before I entered BIll’s recommended filtering values…
today I am going to put Bill’s filtering values and try it out!
thank you
Ozzy
I still use the 10mm main shaft.
You cannot copy my Heli because I have a totally different tail system. My Pixhack v3x is mounted above the tail mount. I would in your case try first to fiddle how the vibration can be reduced by different materials under the Pixhawk.
See what is best working, hard mount or soft mount. Chris just used velcro. I use a 4mm black medium soft sticky something I got from HobbyKing years ago, under my new Pixhack v3.
You know your blades are balanced and other hardware is ok. The FC needs the right solution now.
Good luck.
I hope you did read my correction in my post above regarding the flying time of my TR600.
Fred! That is a nice heli right there ! What size tail motor you use ? Scorpion ? Kv?
12min still great ! I can’t do more than 4-5 min with 6s 5000 mah
But that ceramic bearings you use may have big impact on reducing some low freq oscillation!!
I am sure they feel much better and tight with no toughness balls like the cheap steel once!
What brand you use ? Are they Boca ? 19x10x5mm ? For the frame block ?
After doing close inspection and rechecked the blades tracking I found yesterday a wired thing!;
When I put my blades straight toward the front and putting the digital gage; the digital gage read 0.00 on both blades BUT when I move the blades to side ( elevator) and putting the gage the gage read 0.00 on one blade and the other one read +3.3 !!
What I understand is that if I put the gage on any blade at any direction either side or front should read 0.00 on 0.00 pitch !
And when I fly the heli I can see when the heli tail to facing me the right side of the blades tips not Same! One is higher than other by tiny bit!
That could be the ghost I am chasing !!
Now my Swash plate are leveled 0.00 on all 3 spots and the more accurate the leveling of the Swash the more the different can be notice in the blade pitch !!
This is not normal ! Could be the dampers one softer than other? Or maybe the head not machined right !!
Don’t know !! Investigation is in progress!
Thank you
Ozzy
The tail motor is a Scorpion 3008 1220 Kv. The shaft needed to be changed to fit the tail. Don,t think about it.
The bearings no brand ?? from a local Bearing company (China maybe). I see no differences to the normal steel; but those costing more. Yes= 10X19X5.
You must sort out your blades first or you go nowhere.
So are you saying you compared the pitch of the blade on one side of the aircraft to the blade on the other side? Or did you measure the one blade over the right side of the aircraft then rotate the other blade to the same position and measured it? the first is saying the swashplate wasn’t properly leveled. The second one is saying that the track of the blades was adjusted. I think you mean the first one since it was a big difference. Did you do your tests with the Swashplate Servo Manual enabled?
A level swashplate is important but IMO doesn’t cause vibration. A blade tracking issue on the other hand could cause vibrations.
EDIT: Ozzy, I was looking at your pictures of your pixhawk mounted on your plate. It looks like you removed the pixhawk from its case? So how is the pixhawk board mounted to metal plate below. It looks like you have the board mounted to plywood with maybe a piece of foam in between. then the board is mounted to the plastic piece (like one that comes with the rubber ball like mount) and finally mounted to the metal plate with two small pieces of velcro??
My pixhawk 1 is mounted to my heli with 4 pieces of 1/4 inch 3M foam that has adhesive on both sides. Those are mounted to the Pixhawk 1 case and then attached to the gyro mount plate. I’ve heard some people glue some weight to the underside of the Pixhawk 1 case to give it some more mass which helps with vibrations.
Thank you for the info ! Will help me with my next build 
I am working hard to see why the Swash and the blades refusing to level 0.00 on all X , Y directions !
I think after putting the hard mount I noticed a better result, and after you told me about Chris and what he used that confirmed about hard mount must be used with the pixhawk !
I appreciate your inputs
Any info will help me a lot !
Ozzy