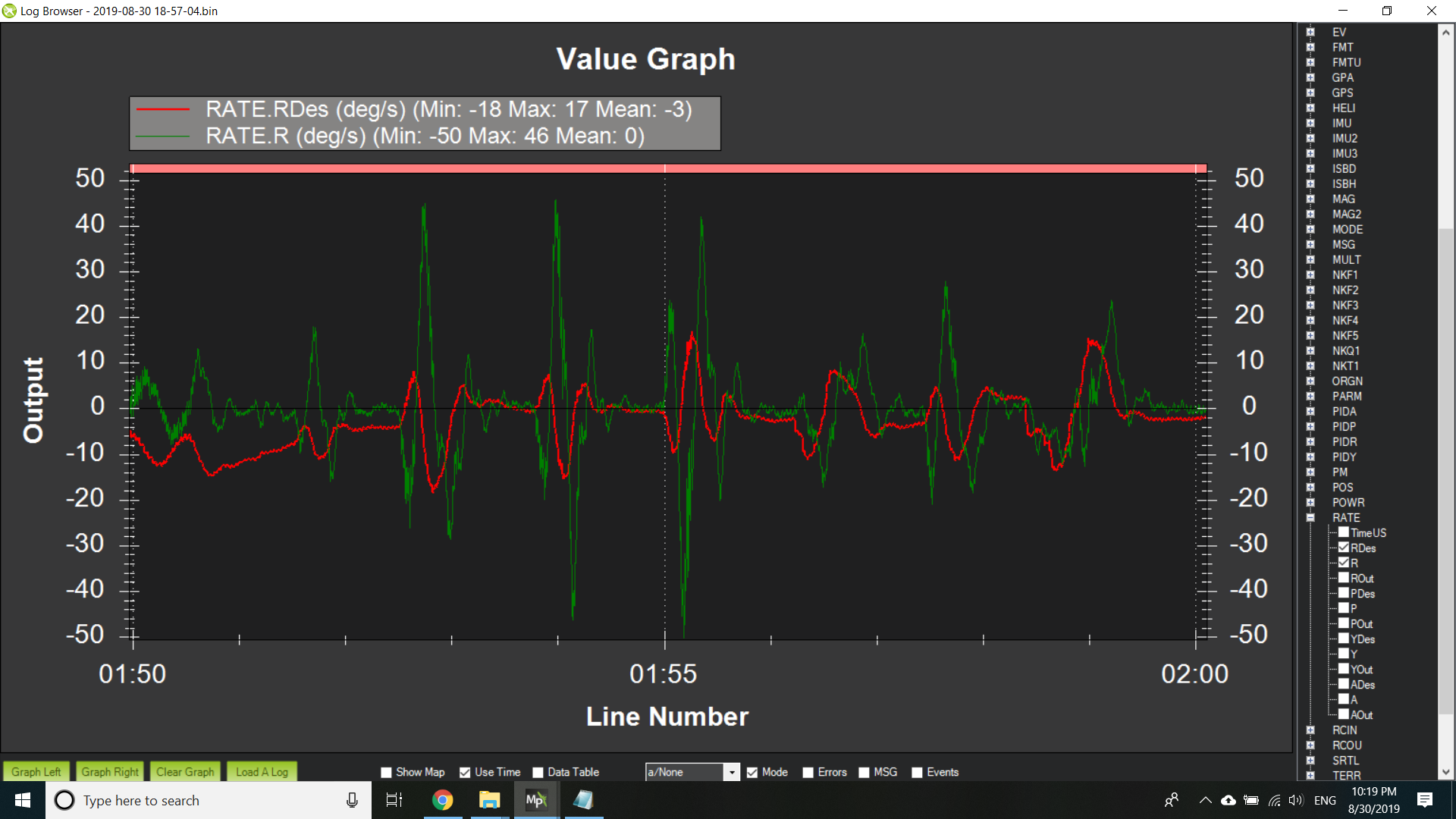
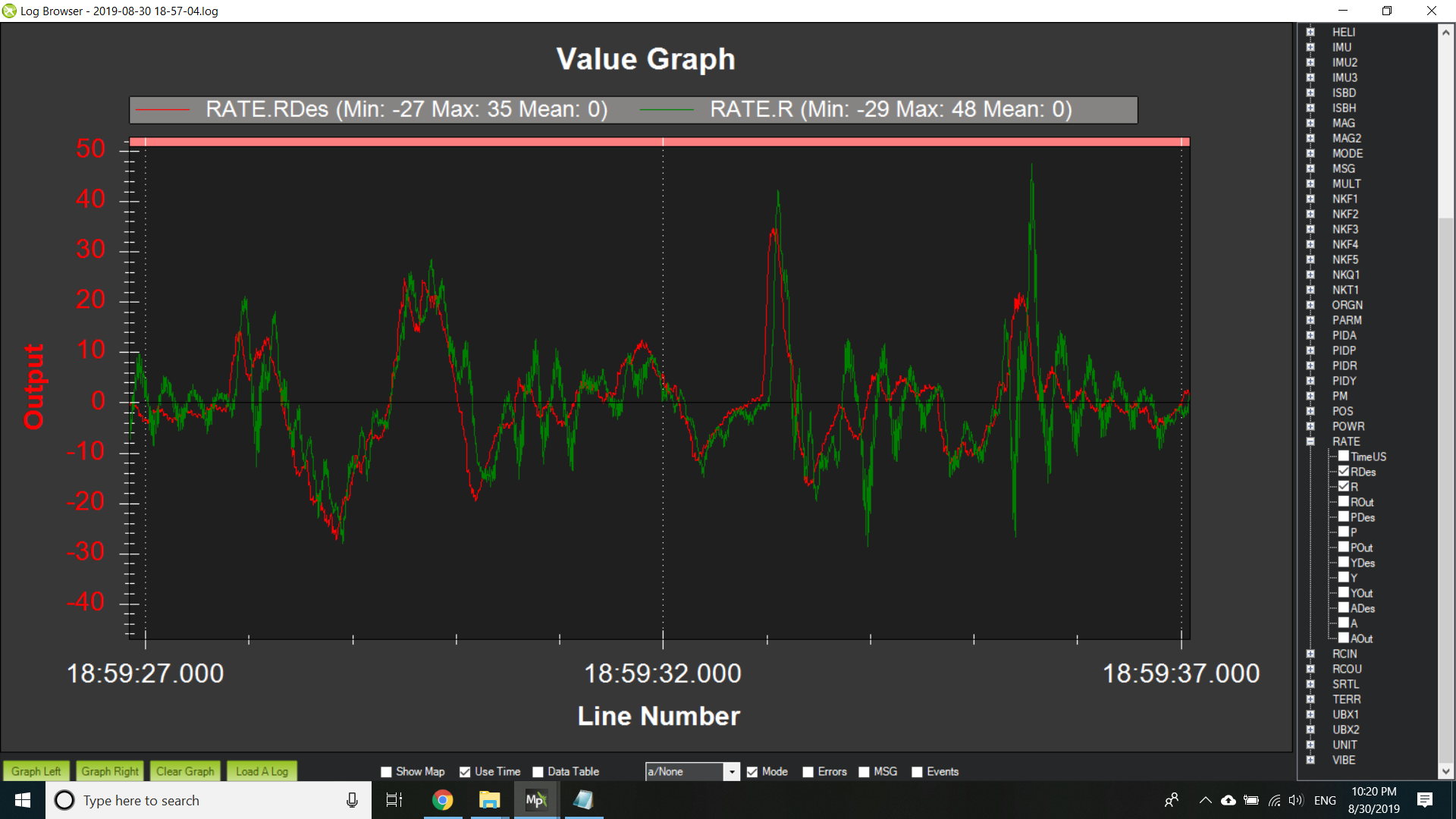
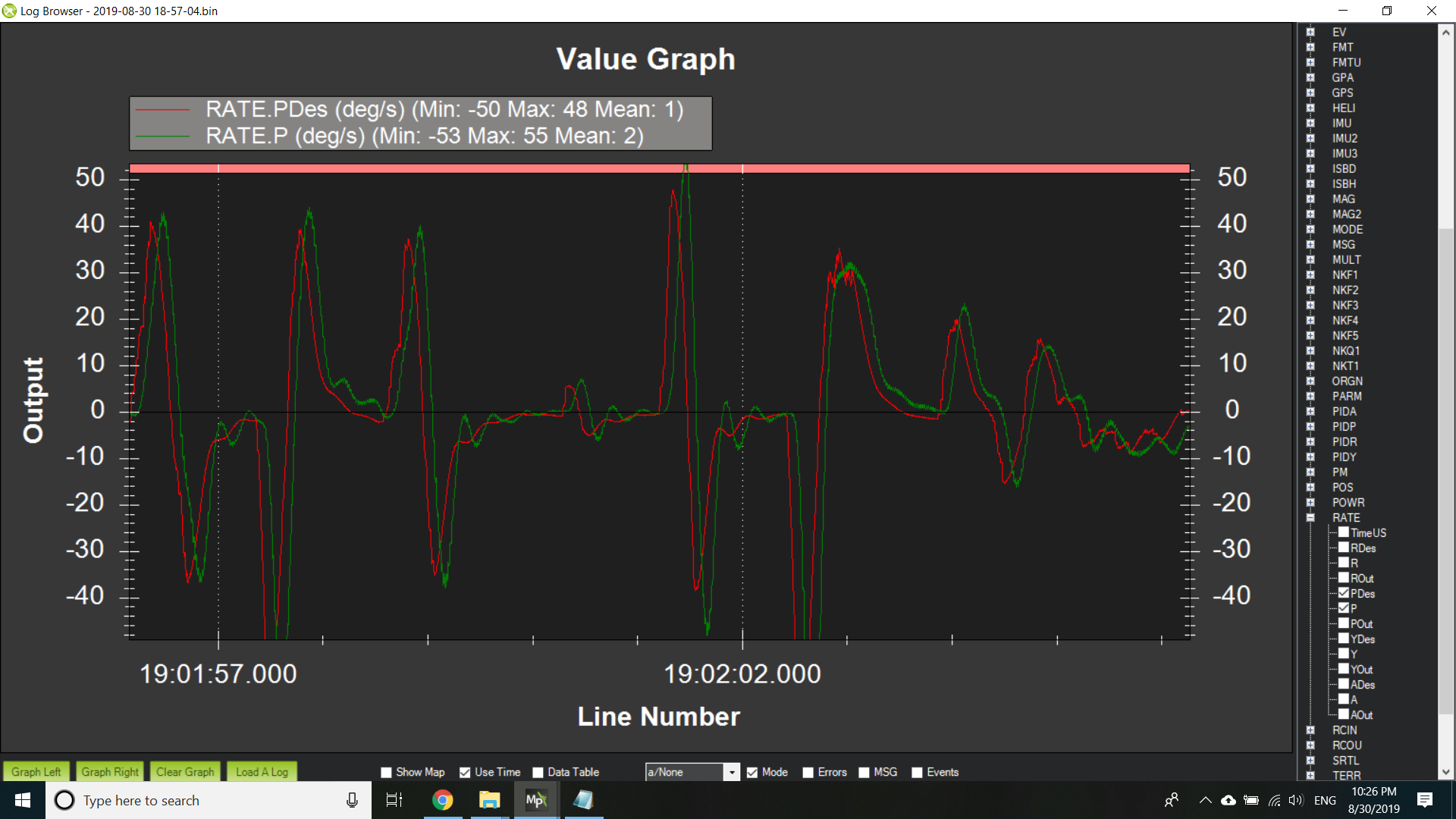
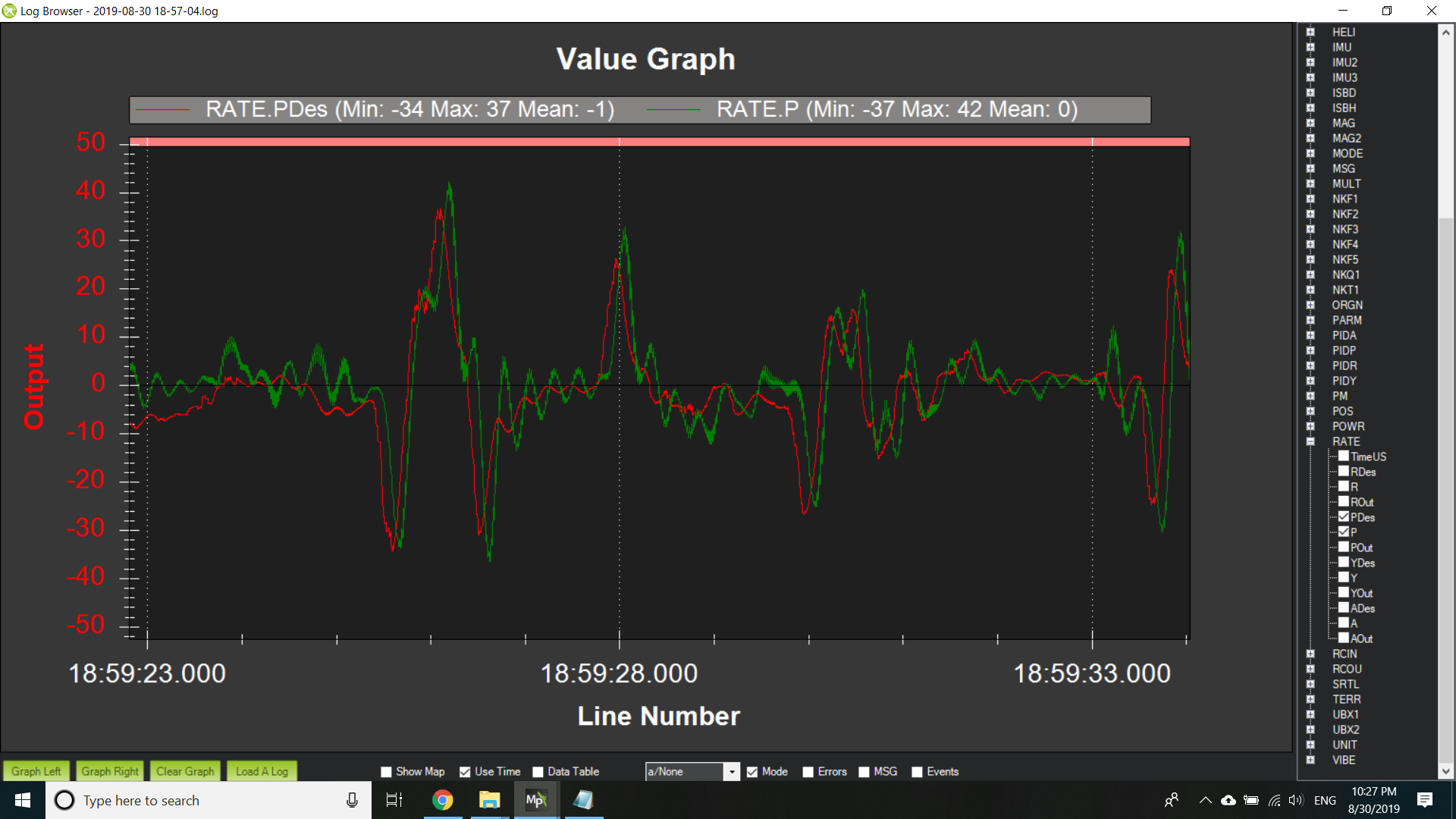
Hi Bill, thanks a lot for posting pics showing the different between the two flights!!
I can see now the freq-oscillating! Even when you tight the blades still your Rate better than mine!!
I tried all methods regard the blades
I have had tightened them, and loosen the blades and based on the size of the blades 710mm I had to make it in between tight and loose, and I use the old method by hold the hole and shake it little bit to see if the blades move …
But I am thinking maybe the front TT gear mash is not loss and can cause that!
But can you check your heli and see if you have wobbling main gear and autorotation gear ?
I have normal amount of gear wobbling and you can’t fix that, but if you have main gear wobbling that will tell me it’s not that who causing the vibration !
I run it today on the bench with head and complete tail removed
Instill see some freq oscillating!
I am Changing the cyclic servos to BK 8001
And just to make sure it’s not servos causing that!
Mate ; you brought nice point here
I have had calibrated my HW 130 opto and got it set then I assign ch 8 for throttle, basically hit the switch and the speed go to what ever max is
Now I just replaced my main gear to 110 t and changed my pinion from 14 to 16t
That will increase the head speed to ~1500
440kv 10 pole
6s 60c 5000 mah
110 main gear
14 pinion
130 A hw v4 opto esc
Thank you guys for the help !
Ozzy