Since we’re showing off our good vibrations:
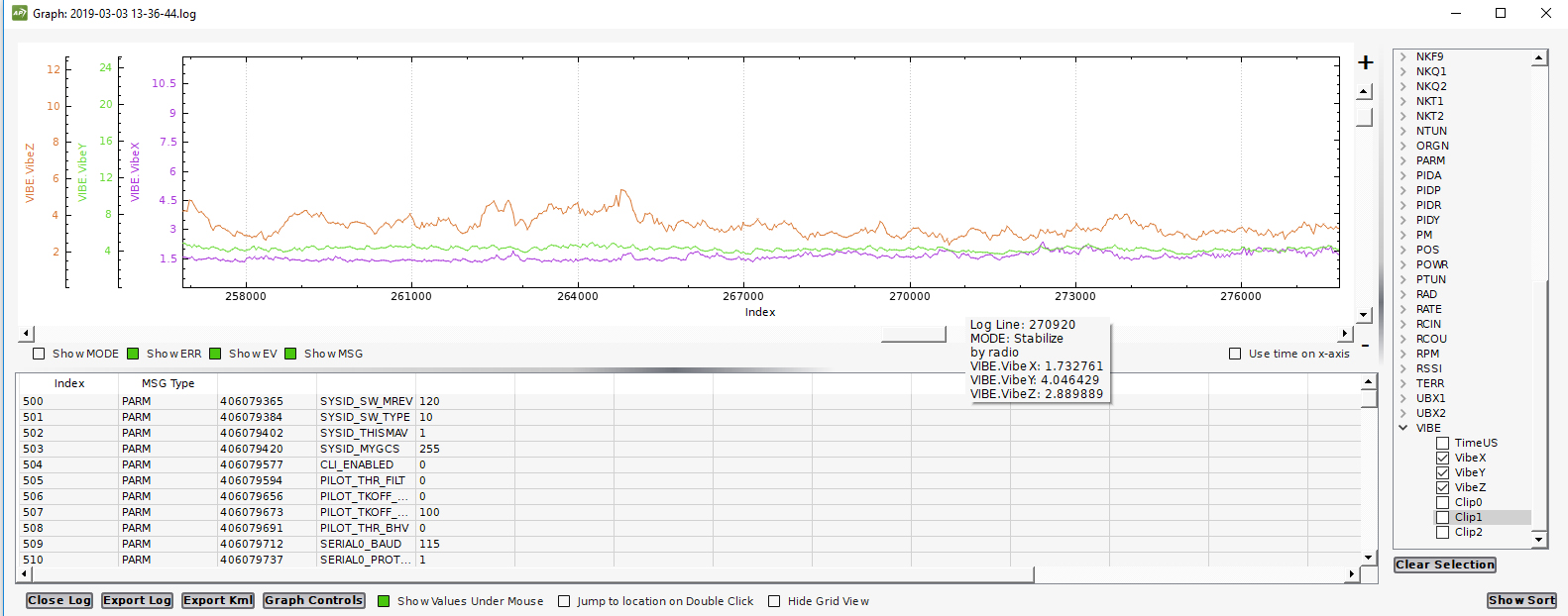
The Soxos 600 has dampers on the tail assembly and tail boom mount which really helps.
Since we’re showing off our good vibrations:
The Soxos 600 has dampers on the tail assembly and tail boom mount which really helps.