This is great but it in the end it comes down to visually looking at blade tracking with the heli in a hover. The blades should be passing through the same point as you look at the rotor system edgewise.
No. GPS does not affect the drift in stabilize mode. How bad is the drift? More than 1m/s?
I looked at your log that you posted just recently. The constant yaw motion was due to the trim or collective to yaw compensation not being set properly. The I term was at its max and thus couldn’t completely stop the yaw. You either set the servo4_trim for your tailrotor blades at zero pitch and then tune the H_COL2YAW param correctly OR you turn off the H_COL2YAW feature and set the servo4_trim for the hover collective. Let me know how you intended to set up the yaw and I can lead you through the making sure it is correct.
In the log that you provided, you didn’t even have the ATC_HOVR_ROL_TRM parameter set. It was set to zero. Was that intentional?
Yes I set it to 0 it was 350 before, but I didn’t notice a change… I will look into the servo4 trim issue and report back…
I can readjust the using the linkages for the servos but that will not be a good idea since they are all 3 linkage Mach each other with length… also the swash is 90 degrees and it’s been calibrated using the awash level method ( nail and magnet)
The machine now after I increase the RPM from 80 to 85 (1180) Become more touchy to the sticks
yes this is what I am going to fo, I set the servo4_trim 860 PWM so now giving me 0 pitch and this was using Passthrough 1, then I am going to check with small hover to make sure everything is good, if not I am going to chamge the H_COL2YAW value till no drift…
What “drift” are you talking about. The uncommanded yaw or the drifting to the left in stabilize mode. There are two issues we are talking about here and the solutions to each individual problem doesn’t have anything to do with the other.
Problem 1: Aircraft drifts to the left in a hover. That is fixed by the ATC_HOVR_ROL_TRM parameter.
Problem 2: Aircraft yaws in a hover. That is being caused by the Yaw I term being saturated because the COL2YAW parameter is set incorrectly.
Why do you mention this? I am very confused as to what this has to do with these two problems?
Ozzy,
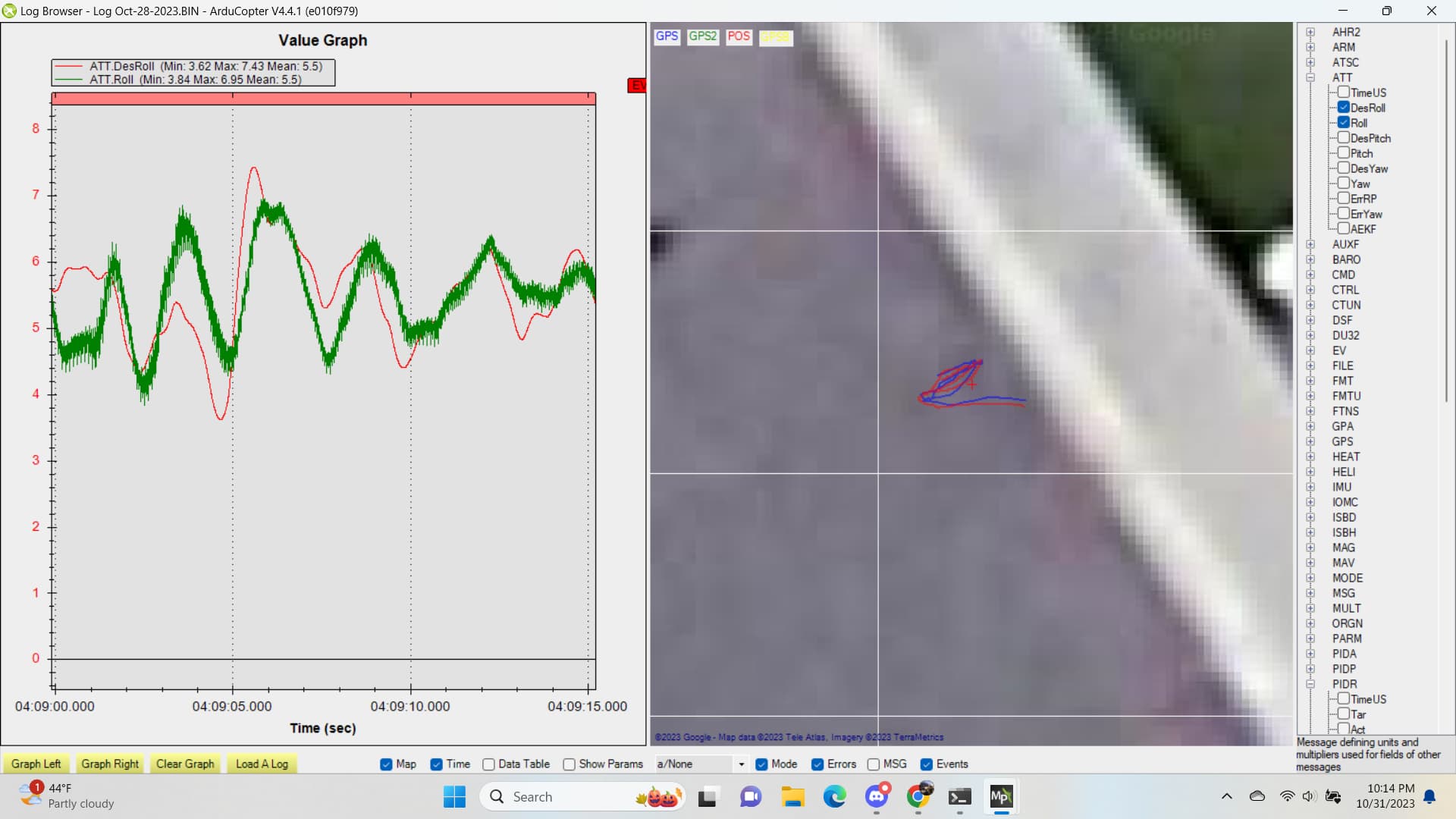
Here is the desired roll attitude and the actual roll attitude just before landing from your most recent log. This was done with ATC_HOVR_ROL_TRM set to 0.
This shows that you need 5.5 deg of roll attitude to maintain a driftless hover. This is quite a lot of roll attitude. So I looked at your parameters and I found that AHRS_TRIM_X is zero. Did you level your heli so the shaft was plum for the first part of the accel calibration when it asks to set the heli level? You could also do this manually. The reason I ask is that it is important to ensure the controller knows when the rotor shaft is perfectly plum to the ground.
So you have two choices:
Set ATC_HOVR_ROL_TRM to 550.
make the shaft plum with the ground and read what the controller says that the roll attitude is. if it is greater than 0.2 or less than -0.2 then take the value of the roll angle from the controller and convert it to radians by dividing by 57.3 (for example if the roll angle read 2 deg, then dividing by 57.3 would give you 0.0349 radians). set the AHRS_TRIM_X to the roll angle in radians. Then subtract the roll angle in deg from 5.5 and use that to set ATC_HOVR_ROL_TRM. in our example, lets say the roll angle read from the controller was 2 deg right roll when the shaft was plum to the ground. Right roll is positive. Thus you would set AHRS_TRIM_X to 0.349 and set ATC_HOVR_ROL_TRM to 350 (remember that this parameter is in centidegrees and that is why it is 350 instead of 3.5)
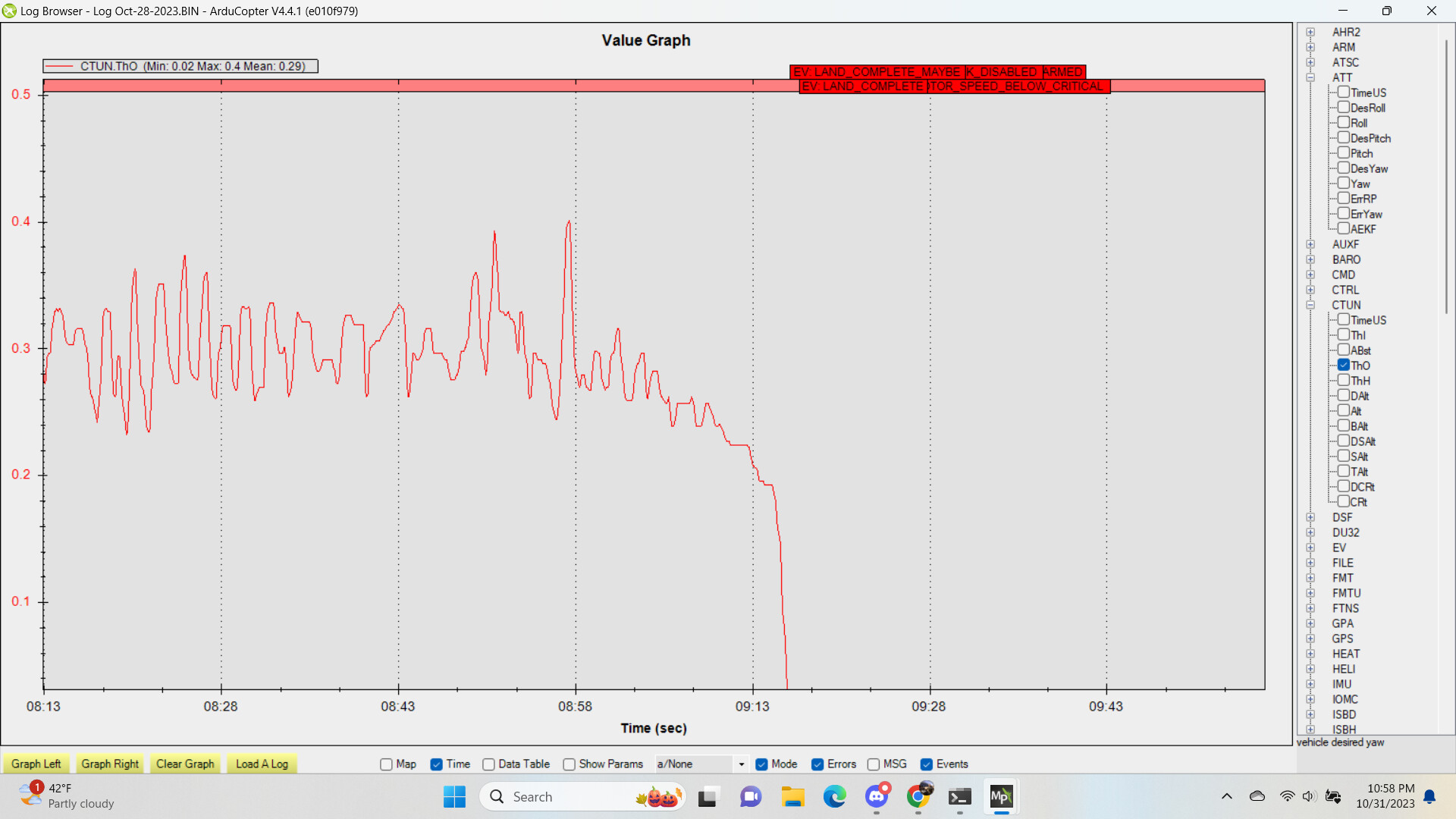
In this plot 0 is the lowest position the collective can go which you have set to -4.6 deg and 1 is the highest position the collective can go which you have set to 11.2 deg. Your collective range is way to much for the rotor speed you are flying.
So lets back up. What is the flying weight of this helicopter? What was the blade length and rotor speed when you had two rotors? What is the blade length and rotor speed now with 3 rotors? My guess is that you kept the blade length the same when you went to 3 rotors because you are using such low collective pitch settings to hover. Certainly having the cambered airfoils on the blades is helping a lot but still.
I know you raised your rotor speed yesterday but I would lower it back to what it was. This rotor system has a lot of lifting power. Also you could easily reduce the max collective pitch to 8 deg. That would make the collective less sensitive.
Please post a param file after you have made any changes. I would like to verify what you have done.
Hi Bill, as somebody near to maiden two helis (OMP M4, and Vario Benzin) I’ve been following this thread with a lot of interest. I’ve got a couple of questions that I hope don’t derail the conversation too much.
-For a maiden flight with all tuning parameters at default, will I need to hold a yaw correction on the stick to hover, or will I be reading the SERVO4_TRIM value from the log data? (Edit: I re-read the wiki and I see the number is from the log data, but I’m still curious to know what to expect when I first lift off, should I expect the heli to yaw-drift and be ready with the yaw stick or will it be stable)
-Why would somebody decide to use H_COL2YAW vs SERVO4_TRIM?
I understand that having the AHRS_TRIM_X set properly before first flight will save some stress and maybe heartache, but failing that if the ATC_HOVR_ROL_TRM is set effectively after a test flight will there be any lasting negatives to that method?
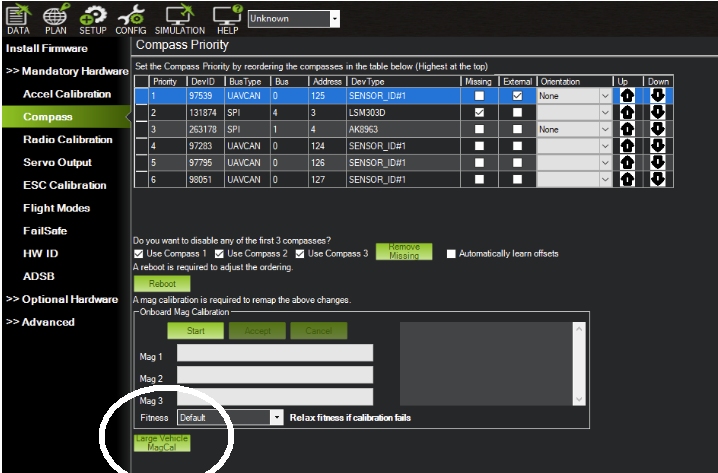
If you’re using MP you can calibrate using the ‘Large Vehicle MagCalc’ button at the bottom of the calibration screen: You just need to know which way is North at your location.
Allister,
If the manufacturer tells you what the hover trim pitch setting is supposed to be for the tailrotor pitch then I would recommend for your maiden flight to set the SERVO4_TRIM to the value that gives you the hover tailrotor pitch. Then after you have a couple of flights under your belt then you can see if you want to transition to adding collective to yaw compensation.
H_COL2YAW provides feedforward collective to yaw compensation. Essentially an mechanical mixing of tailrotor pitch due to collective changes. The calculation of the amount of tailrotor to add for a change in collective is based on theory. The wiki has limited instructions on how to set it up but it is helpful if you intend to fly at different gross weights cause it will adjust the tail rotor mixing accordingly to help minimize the yaw excursion with collective inputs.
That is a great question. I don’t know that I have a definitive answer. I don’t think it would matter but I have never tried this.
its same issue made me thorw the old unit…
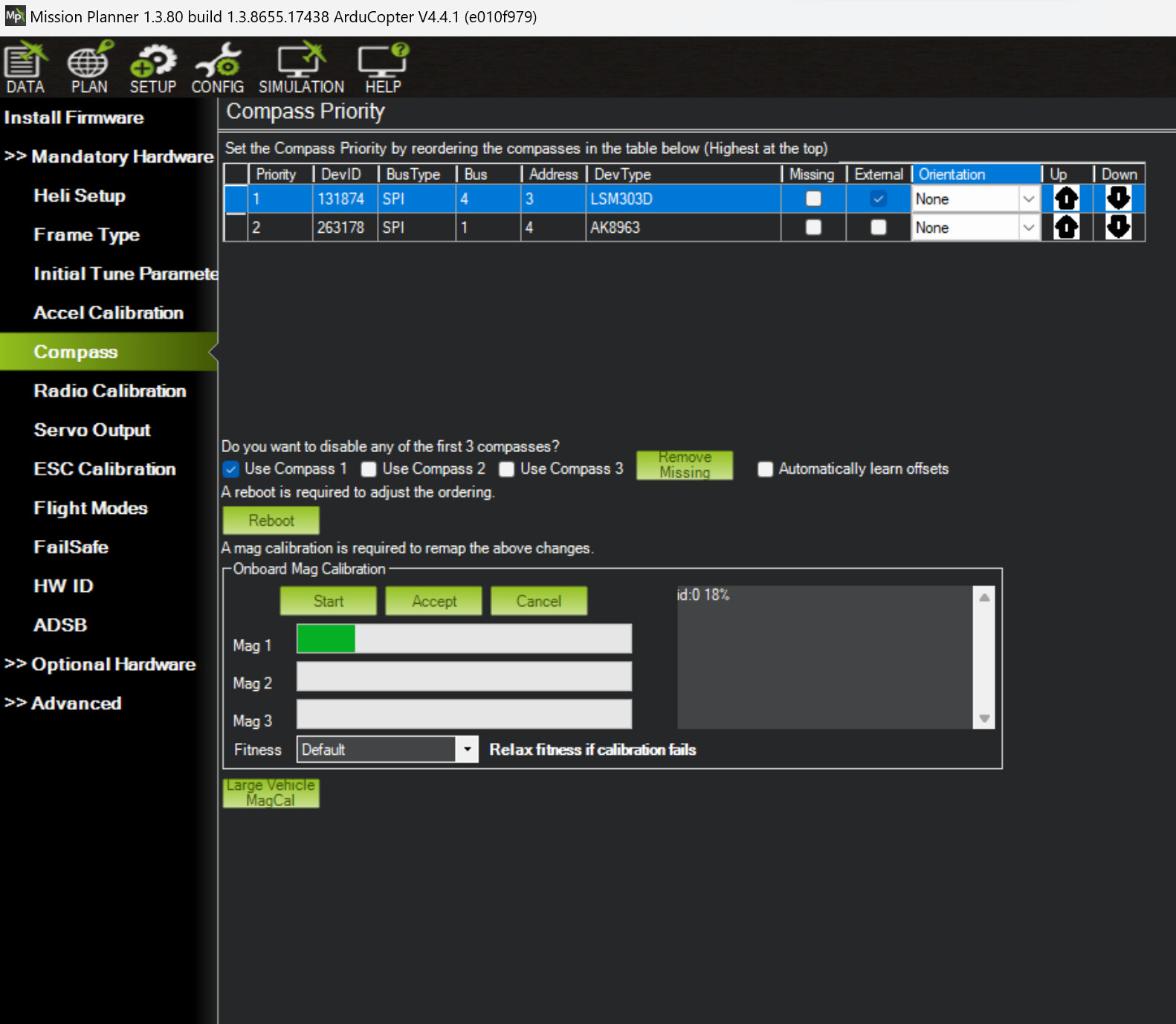
the Mag1 not registering… its keep repeating… I demagnetized the metal parts, try at different locations away from electronics, tried in open area… I also calibrated Mag2 seperatly then tried Mag1 but not working…
From the picture that you showed in your post the mag in the GPS is Mag 1 because you can see it has the External checked beside it.
Mag 2 is the mag in your pixhawk
If you are not connecting your GPS through the CAN bus connector on the Pixhawk then you do NOT change any settings for the can bus. You are connected to the Pixhawk through the GPS port and is why you have your GPS type set to 1.
So you are saying that the green bar goes to the end and then restarts from the beginning over and over. If that is the case then I’m not sure what to do.
You could just calibrate the internal compass (Mag2) and use it as the only compass. I typically only use one compass anyway but it is usually the external compass that is in the GPS. As long as you are getting a good compass calibrations then I would use the internal compass (Mag 2).
I recalibrated all the Hardware including Compass and the accel calibration…
the AHRS_TRM_X 0 and the H_COL2YAW 0.2
the Heli still drifting to left and yaw left…
if I let the setick go it will drift fast but the Yaw is better than before but still yaw to left …
SERVO4_TRIM 860 and when I use the passthrough the tail blaldes are dead-center…
0.00 Pitch
I don’t want to set the ATC_HOVR_ROL_TRM to 550. before I know the casue behind that drift!
the swash is good, the blades tracking is good too…
is there anything you may know that can casue drifting?
It is due to the tail rotor thrust. In order to counteract main rotor torque, tail rotor is producing thrust which multiplied by the tail boom length creates an equal and opposite torque. So while the total torque balance (main rotor torque + tail rotor x boom length) is equal to zero, the balance of forces is not zero (tail rotor thrust is not being counteracted by anything yet). This is the primary cause of drift. Now, one way to counteract for tail rotor lateral force is to “lean” main rotor in the opposite direction. So the horizontal component of the main rotor lift is now counteracting the tail rotor thrust. The hover roll parameter is there exactly for this reason.