Just for my personal learning, how can you see this in the logging?
@heri I couldn’t understand why the response was so bad on both pitch and roll (the ATC values previously suggested should be good for at least a stable and controllable hover).
So looking at the rates, if you plot rollrate-desired and pitchrate achieved, you come to this:

and this:
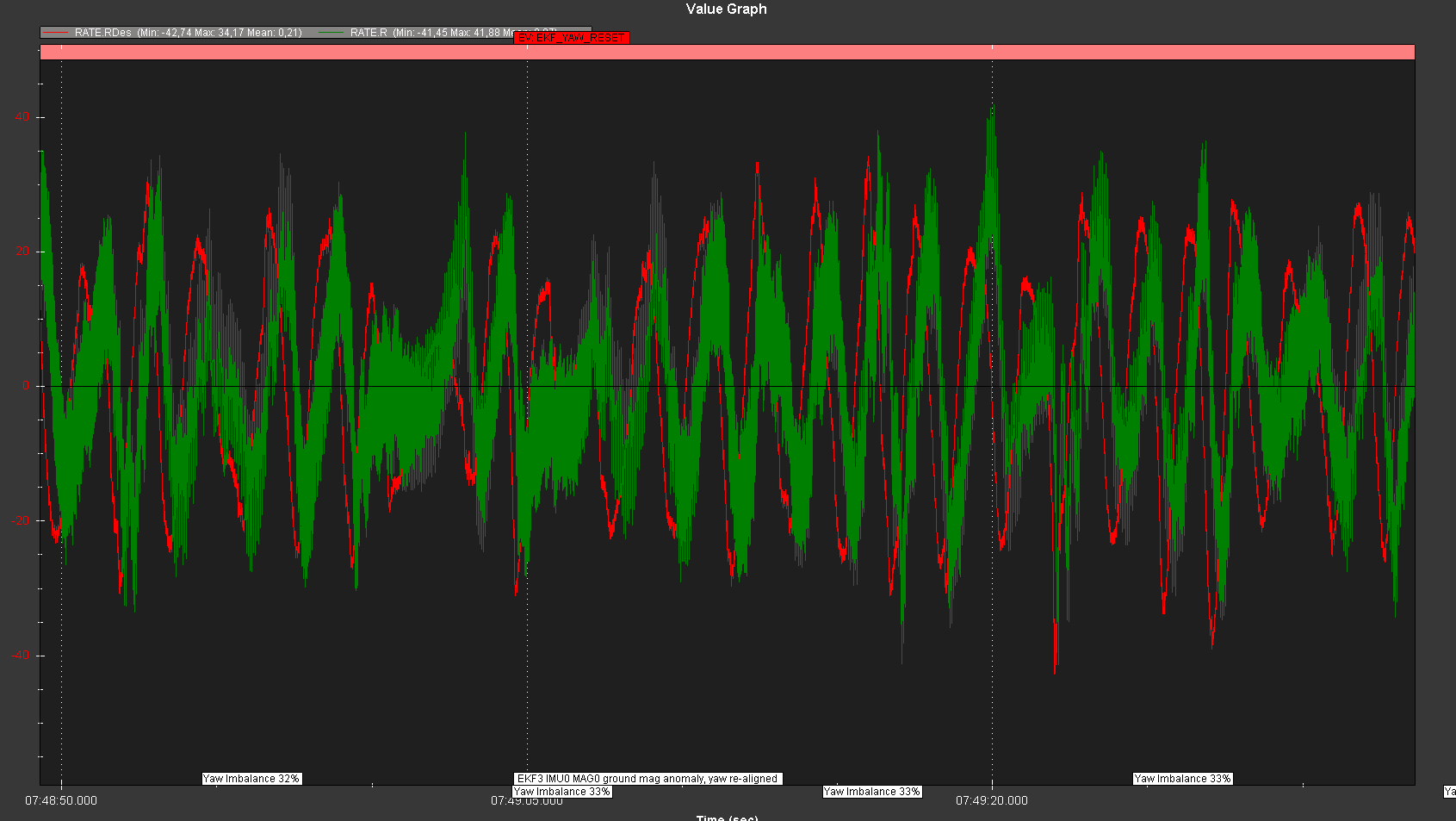
the first picture shows the coupling between pitch and roll, the second shows a delay ranging between 0.5 and 0.7 s between roll desired and roll achieved (an eternity).
Now, pid tuning of course come into play, but the coupling seemed too much to me, so I thought to suggest checking the phase.
1 Like
@heri not sure if you’ve seen my talk at the Ardupilot forum back in 2021. I spoke about helicopter rotor dynamics in my talk. Here’s a video of my talk where I discuss details of helicopter rotor dynamics and the idea of rotor phase lag in the first 10 minutes of that talk.

Hopefully this doesn’t confuse the issue here. But it is important to understand that the 90° phase lag really only applies to teetering rotor helicopters that do not have any dampeners in the spindle. Most of the RC helicopters have dampeners, and in the multi blade rotors, the flapping hinge is offset from the shaft, which also changes the rotor phase lag, making it less than 90°. So what @Ferrosan is suggesting here is a good check of that mechanical phase lag built into the mechanics of the swashplate. It ensures that you at least have the phase lag at 90deg. In most cases to get a pure response for a given pitch or roll stick input, you may have to mechanically or through the phase parameter of the generic swashplate adjust the point of max/min cyclic pitch input to the appropriate phase lag of your rotor response.
1 Like
And in this specific case the head doesn’t even have dampeners, so it all relies on blade flexibility thus “virtual hinge” for flapping. The real Ecureuil rotor head features a central plate which allows for blade flapping, the so called Flex-Star. In this scale reproduction it is just a rigid component. So my suggestion of the 90 deg is just an initial starting point, can be optimized after .
1 Like
Ferrosan,
Thank you is not enough man!
you saved my Heli again!
I was wendering why every other RC AS350 head grib’s linkgage tilted!
after looking through the net, I see all of them have the Grib linkages tilted and they are not 90d
after changing the postion of the arms, I know see very very little movment when I rock the Syclic up and down!
and the two other blades to the sides moving with my syclic input
I attached pic you can see clearly that the pushrods are not 90d
you think I can perform a small hover and move forward?
I will of coruse re check all 3 blades tracking and the swash just to make sure nothing been off!
I apprecieate you and Bill efforts…
Ozzy


Check that at full swashplate movement the uniballs (especially lower ones- attached to the swash) are not hitting the mechanical limit.
Also check the control direction is correct:
-
place one blade over tail boom, set H_SV_MAN to 1 and place collective at 0 deg angle of attack;
-
apply full forward cyclic:
- front-right blade should increase angle of attack
- front-left blade should decrease angle of attack
- no-change (or at least very little) on the rear blade (over tail boom)
-
apply full right cyclic:
- front-right blade should decrease a little bit angle of attack
- front-left blade should decrease a little bit angle of attack
- rear blade (over tail boom) should increase angle of attack (largest angle of attack variation of the three blades)
Hi,
I set H_SV_MAN to 1 and place collective at 0 deg angle of attack;
the Mid stick was on -37% but this is not always the case, sometimes the 0.00 pitch on -53% or -74% stick movment and so on…
but that is not the case, let say the Mid stick 0.00 pitch was achived at -50%,
then when I push up stick (syclic nose down);
Left blade Right Blade
Yellow Blade : -5.1 -------------------------------------------Red Blade: +6.5
Blue Blade : -5.7 -------------------------------------------Yellow Blade : +6.7
Red Blade: -5.6 -------------------------------------------Blue Blade: +6.5
rear blades not moving.
then when I push down stick (syclic nose up);
Left blade Right Blade
Red Blade : +6.0-------------------------------------------Blue Blade: -7.9
Yellow Blade : +6.6--------------------------------------------Red Blade : -8.7 from-0.3 mid
Blue Blade: +5.9--------------------------------------------Yellow Blade: -8.8 from-0.4 mid
rear blade not moving
now for the right syclic;
Left Red Blade : -4.5---------------- rear Yellow blade +8.7-----------------Right Blue blade -4.5
note: I calibrated the swash plate and its 90 to shaft.
I also calibrated the blades by checking each blade’s pitch engle at one postion ( boom postion); I rotate each blade when its exactly on the boom, I read the pitch, and adjust all three linkages…
the problem I am facing is that when I move the thru stick or the syclic stick the blades never go back to the first postion ( original gage reading)!
its frustration! I.e: if I move the Thr stick to -44% to achieve 0.00 reading, then when I move it again and return back to -44% the gauge read another number +1.4 somtimes +2.3 or -1.5 and so on…
same when I center the Thru stick and move the syclic stick up and bring it down then center, the pitch gauge read different numbers each time I let the syclic go to center!
each time I move it give sifferent numbers!
I think its due to servo quality! servos must go back to the original point…
I don’t know its just crazy how this thing fly!
Sorry for the long reply
Thank you!
1 Like
@flyingdragon control directions looks good to me now, phase also. You might want to reduce a bit the swashplate throws, it appears you have a lot of tilt: you can reduce H_CYC_MAX parameter until you get around 6 degs of blade angle of attack at full right cyclic (instead of the current 8.7) on the rear blade (over tail boom).
Also check the stabilization works in the correct way, tilt the heli on roll and pitch, swashplate should lean against and sort of remain “level”.
Otherwise looks good to me for trying a small hover, but wait for @bnsgeyer check/green light too ![]()
@flyingdragon
I agree with @Ferrosan.
I’m a little confused by this statement. Anytime that you use the H_SV_MAN in passthrough mode, the collective stick position (RC throttle stick) should always be in the same position at zero deg collective.
Which linkages did you change? The pitch links that connect to the blade control arms? I don’t think that is a smart idea as that will affect your blade tracking. Have you done blade tracking on his aircraft already? Blade tracking on a multiblade (more than 2 blades) rotor can be tricky but you definitely want to spend the time doing it otherwise you will have more vibrations.
I think with most of our RC equipment, there is some slop to the ball links. I know that my aircraft have it. I think when you are flying the blades always want to seek flat pitch and thus are always pressing down on the control linkages (at least for non aerobatic flying). So try pressing down on the control arms after every time you move the controls to remove the slop.
You should get a more consistent measurement.
1 Like
I already did the blade tracking to all 3 blades, I explained above my way to do that.
It’s just normal old school way.
I rechecked the awash level and it’s 90
So everything on table is good except the problem regard the servos positions
I am using Futaba system and it’s -100 to +100 pitch curve
H_SV_MAN 1
If I move the stick to the Mid stick ( Center of the joystick) will give me pitch value ~+4.5
If I try again it will give ~3.5
And if I try again it will give different reading
Each time the pitch gauge give different results./
I think that’s is servos issues… those servos are BK 8001
There is no slope in the servos or the arms. There is a very little play in the awash plate left and right
But that’s not the cause of that issue…
Anyway, I will test hover the machine today to see if there is any drift or any control issue…
Thank you
so which pitch links did you adjust to make all of the blades read the same value when they passed over the tail? I don’t understand.
I adjust the yellow blade and the blue, then re-checked the tracking to make sure all of them within .02 difference.
sounds good, I will reduce the Swashplate throws and fly it today and report any problem./
Thank you
I don’t understand. did you fly to determine that the blades were tracking or did you just do it through setting the pitch within 0.02?
Hi,
I flew it today with some hovering, its still little touchy to the sticks inputs,
but if I let the sticks go it will drft to the left and nose yaw direction to the left.
the collective up and down is good but not fast when recover from drop; I.e ; if I drop it will take a moment to recover and lift after my + collective input.
its not that bad, maybe I am still new to the 3 blades behavior…
I have attached the flight log, if you can please take a quick look and let me know what to do regard the drift issue…
I don’t want to switch to (Hold postion) before I feel its smooth and less sensitive …
Thank you so much…
Ozzy
This is normal considering you lowered headspeed quite a bit (around 1100 rpm?).
Log now looks way better than last one. Did you have a read at the wiki for the next steps?
I am fallowing the Wiki carfully, but just wendering why I am facing this drifting and Yaw to left?
I tried changing the Act_HOVR_ROL_TRIM 300 but nothing
is there any paramter you may now that I can use for this matter?
Thank you
Are you 100% sure you’ve actually changed the value? For a while I was wondering why some of my parameters seemed to be reverting to old values until I realised that after I change a value on screen I have to press the Enter key to register it, before then writing it to the FC. If I don’t press Enter all I’m doing is writing the original value to the FC ![]()
You basically press write Params to the left third command, and your MP should register it to the unit,
I still believe that there is something going on with servos!
Last night I spent an hour re tracking the blades, I achieved 0 different in all 3 blades with MAX MIN and Zero position
But after I spool it up twice; I set it on the bench and checked the tracking; they were way off within 0.7 to 0.9
The digital gauge should read exact number each time you place it on any blade at the specified blade position
I.e:
Place the Gauge on the Heli frame and press till you see 0.00 this is how calibrated to the frame…
place the first blade exactly above the tail boom
Use then H_SV_MAN 3 ( zero )
Then place the gauge exactly on each blade CG point ( middle of the blade)
Rotate each blade to be on the tail boom and read the gauge…
all 3 blades should read 0.00 in that location ( boom location)
I repeat the above with H_SV_MAN 2 and 4 MAX and MIN
Any blade read different than others; I adjust the linkage for that blade to match the rest
Then place paper on wall and mark one of the blade end on that paper, rotate the head rotor and each blade should be exactly on the mark for the first one…
This is the methods I use to track the blades…
I am open to any other way your guys my use…
@flyingdragon understood I orrect, you checked your blade tracking only on this moreless static way. You don’t check the träcking optical while the rotor is running. Are you sure that your blades are 100% identical in weight, CG etc. If there is a small amount of difference the blades will not track well while running.
1 Like