It is due to the tail rotor thrust. In order to counteract main rotor torque, tail rotor is producing thrust which multiplied by the tail boom length creates an equal and opposite torque. So while the total torque balance (main rotor torque + tail rotor x boom length) is equal to zero, the balance of forces is not zero (tail rotor thrust is not being counteracted by anything yet). This is the primary cause of drift. Now, one way to counteract for tail rotor lateral force is to “lean” main rotor in the opposite direction. So the horizontal component of the main rotor lift is now counteracting the tail rotor thrust. The hover roll parameter is there exactly for this reason.
Ozzy,
I don’t understand why you changed H_COL_ANG_MIN when I only asked you to change the collective max.
You changed H_COL_ANG_MIN to -3.3 from -4.6 and H_COL_MIN stayed at 1575. Did you change the H_COL_ANG_MIN because that was the new reading with H_SV_MAN at min collective after you changed H_COL_MAX parameter?
Also you changed H_COL_ZERO_THRST to 0 from -1. Why did you make this change? I didn’t ask you to do that. If you have blades that do not have a symmetrical airfoil then keep it at the value at -1.
Now that Ferruccio explained heli’s require the lean angle to hover without drifting. I believe yours is higher than what you expect because now you have 3 blades which produce more torque than 2 blades. So it makes sense that the tailrotor thrust to conteract this would be higher and thus the lean angle to oppose the tailrotor thrust would also be higher.
Please set the following parameters
ATC_HOVR_ROL_TRM to 550
H_COL2YAW to 1.0
H_COL_ZERO_THRST to -1
Hover the helicopter and post the log.
1 Like
Hi Bill,
yes after I set the collective through the H_SV_MAN I mesaured (using PIT gauge) the max Collective and Min collective and as you recommended to keep it at +8 for max ’
I used the H_COL_MAX and H_COL_MIN to set collective pitch values.
then I copied those numbers and changed to the fallow:
the Min : H_COL_ANG_MIN -3.3
MAX : H_COL_ANG_MAX 8
and the mid was H_COL_HOVR 0.3
I had the change the value of the H_COL_MIN to get -3.3 pitch in the lower stick.
I didn’t change the H_COL_ZERO_THRST , its still -1
I went back to the param and I see its still -1
I will make the changes you recommended above and test flight the machine…
I appreciate it
I flew it today after the above changes, there is no more drift to left, but the tail still yaw to left
If we can lock the tail straight it will be great…
it’s still about 15% touchy but not bad…
do you think maybe replacing the tail blades to wider once or taller?
I think Iremeber I did samething before ( back 2019), I am just to old to remeber those details if I replaced them or not… but I think so!
here is the Log for the flight… thank you for standing with me with this long jureny…
Ozzy,
I finally discovered why you were seeing the aircraft yaw without any input. Your trim value for the transmitter was not set correctly. The trim position of the yaw stick is at a PWM of 1498. You had the trim position parameter set to 1547. I should have check that in the first place but your Yaw to collective compensation was also not set correctly, so that is what caught my attention first.
First, if you did not change H_COL_MIN then why was your H_COL_ANG_MIN different when you measured it after setting the max collective to 8 deg. Please verify that the H_COL_ANG_MIN is really -3.3 deg when you measure it with the H_SV_MAN at minimum collective setting.
Second, the H_COL_HOVER should NOT be changed using the value you measure at the mid setting for H_SV_MAN. H_COL_HOVER is set automatically by the controller.
Please make the following changes.
RC4_TRIM 1498
H_YAW2COL 3
H_COL_HOVER 0.4
Please hover the aircraft and post the log
yeah, I think I forget that setting since 2019, I don’t know when I set that value.
I did change teh H_COL_MIN to the number I see in the Pitch gauge, sorry for the confusion, its -3.3 when I use H_SV_MAN at Min Collective.
I changed the values to the above numbers but the H_COL2YAW 2, I was not able to go 3 its giving me note; its out of range, so I tried 2
I flew the Heli today its WAY better and nice stable hover…
its still drifting to the left but after when you let the stick go for ~ one sec, its not bad its very very slow drifting. I think if I try the HOLD mode will be on the spot.
the tail is good now, I see one or two very minor slow fish tail but not noticable at all…
I been flying for long time so I can tell if it’s 100% or 90ish%
but its way better and if you give me the green light I will try HOLD POSITON and other flight modes
here is the Log for today flight…
oh by the way… after landing the 6s battery was HOT ~43F and the motor also very hot to toch, this maybe the casue of the 3 blades load…
Thank you so much for the big help Bill!
Ozzy
Ozzy,
Do not fly in any position stabilized mode like Loiter, Position Hold, or Auto until you finished tuning the attitude controller.
You’re welcome. Glad I could help!
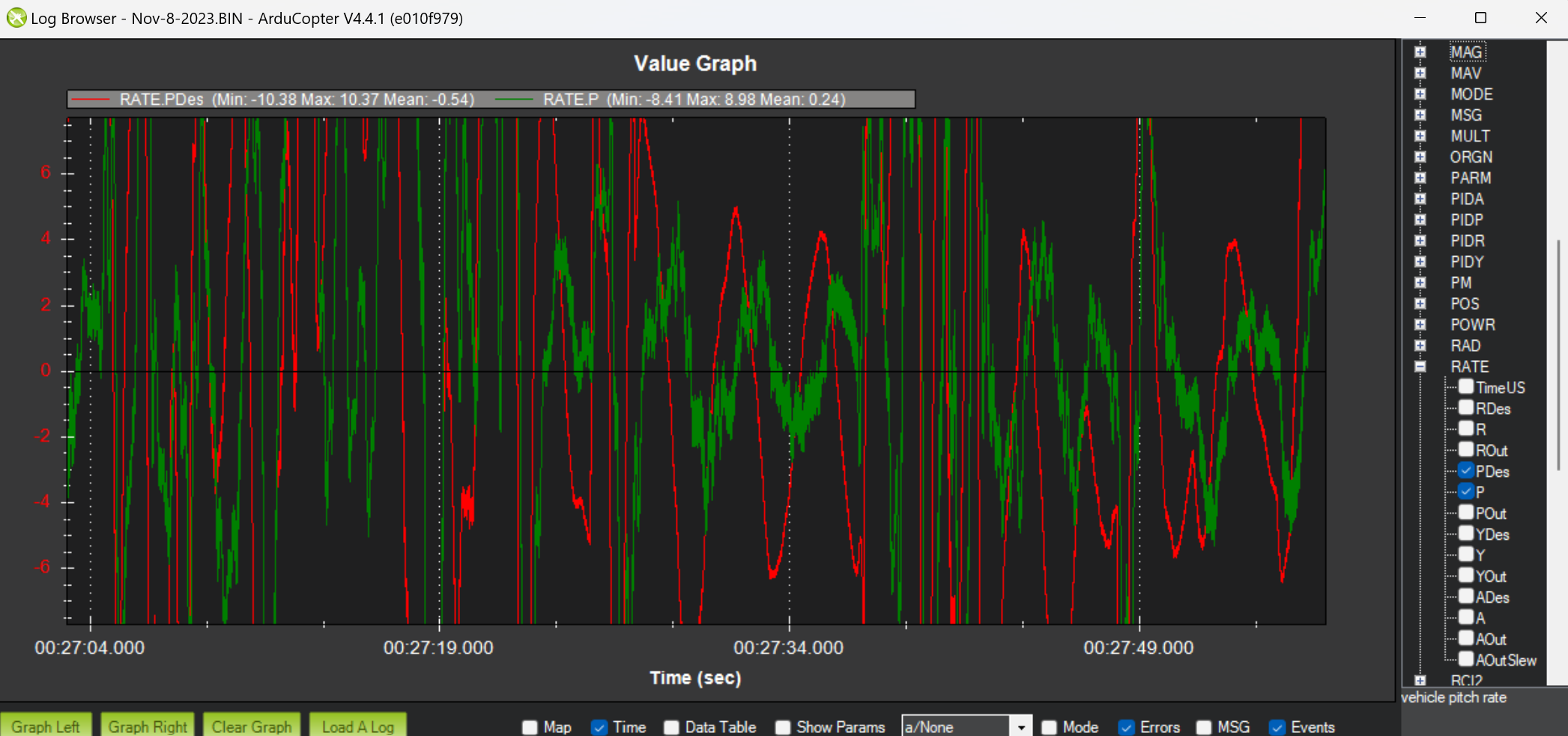
sorry to ask again but why my RDes, R also PDes and P not falowing each others…
I learned from the other posts that these RDes should fallow the R and PDes should fallow the P…
also is there vibration issue or any freq problemsthat the graphics show? just to make sure my IMU is isolated and free of vibraions problmes ?
I don’t know how to check these geaphics…
Thank you
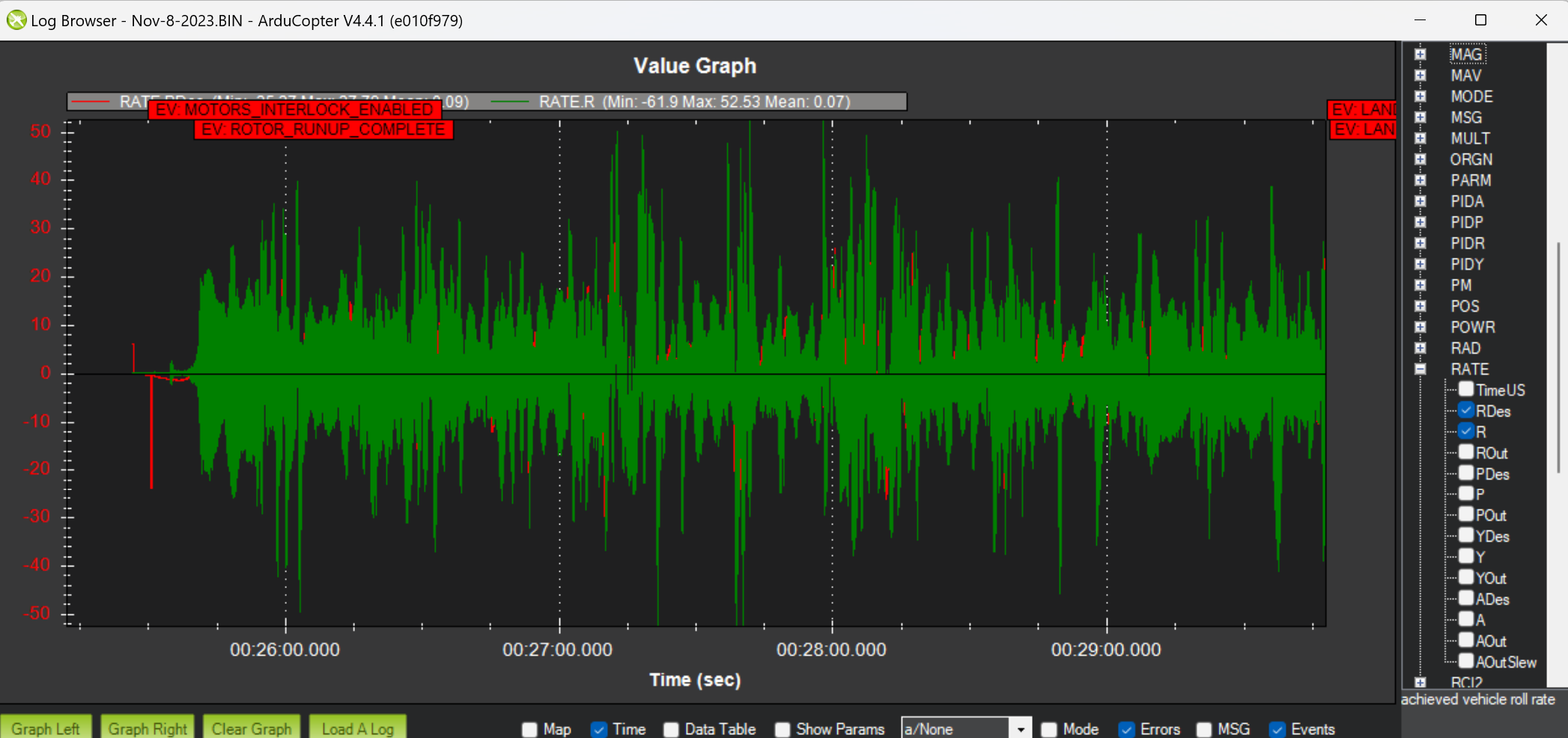
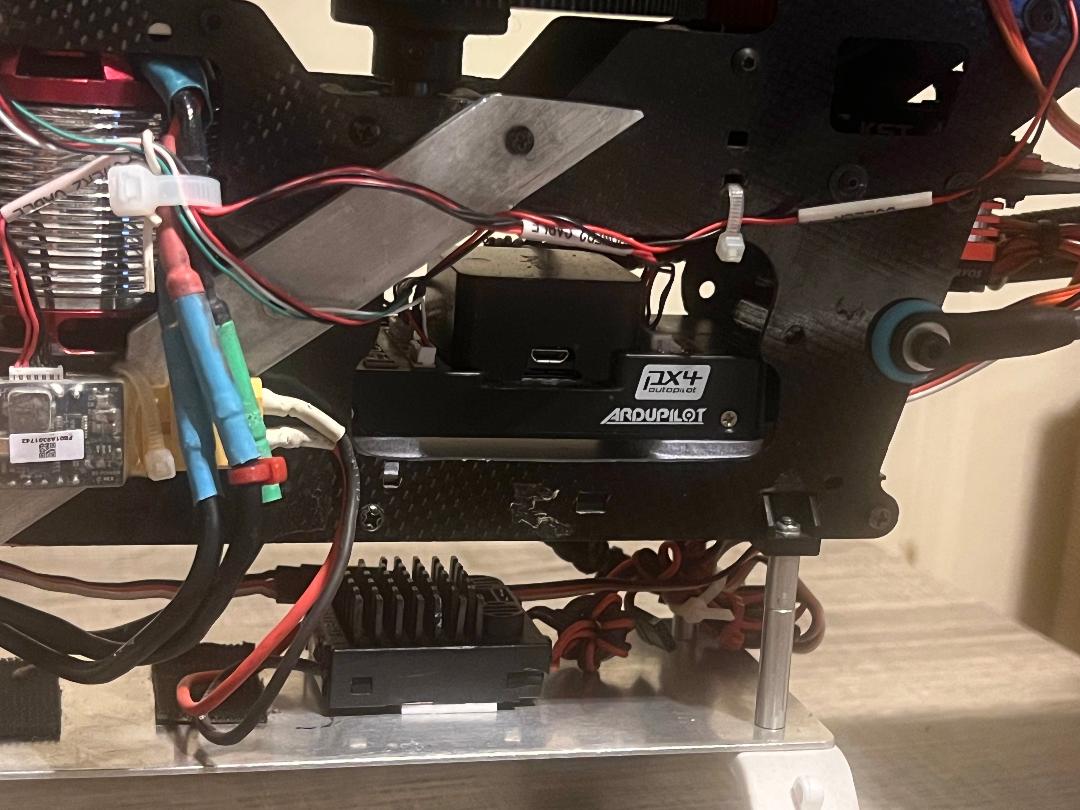
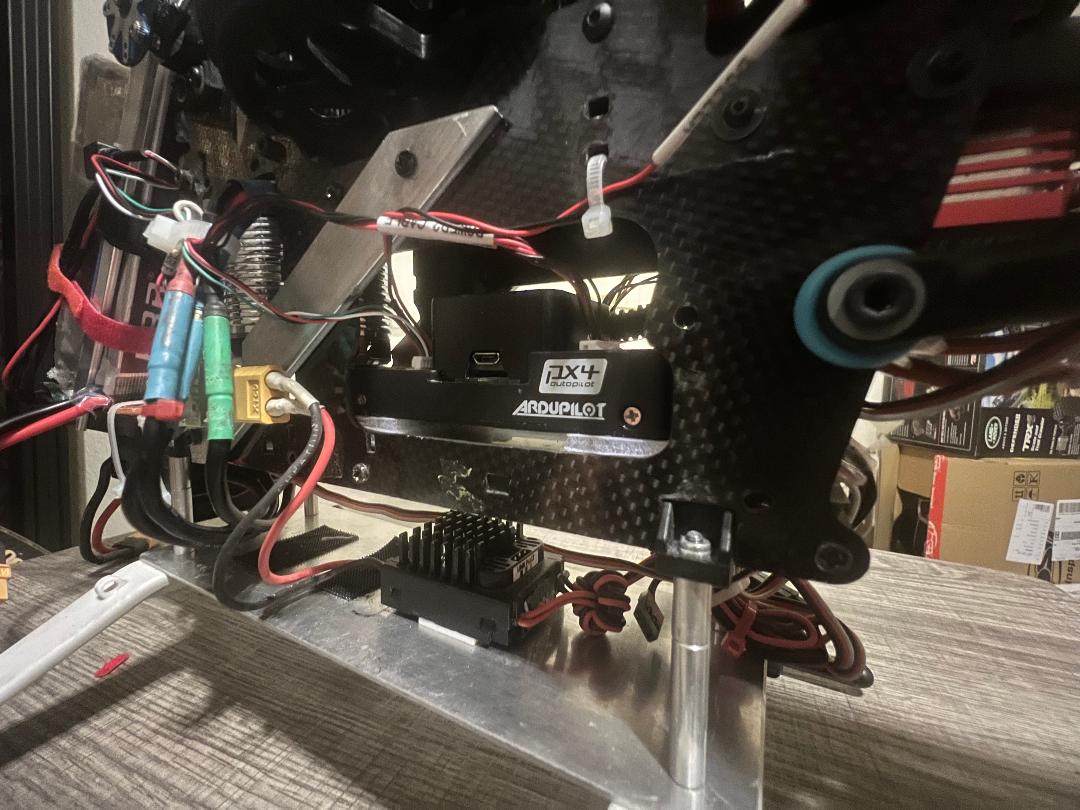
@flyingdragon Can you show us how did you mount the Flight Control? You are not likely of getting rid of that roll obscillation (look at IMU.Gyr in the logs) just with filters.
Ozzy,
Based on the frequency (~40 hz), I am guessing that it is the 2nd rotor harmonic. You have set the notch filter for the 1st, 3rd and 6th.
Found that you still have batch logging and used that to identify the harmonics. Here is the plot
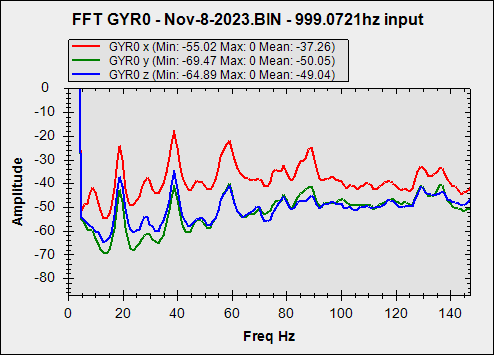
So based on this I would suggest the following changes to your notch filter
INS_HNTCH_FREQ 19
INS_HNTCH_HMNCS 7
INS_HNTCH_BW 15
Only change these parameters for the notch. The rest are fine with their current settings
@Ferrosan I think things are fine the way they are. We just didn’t have the harmonics correct. Typically you will look at RATE.ROut and RATE.POut to see how much noise is coming through. I think Leonard’s rule of thumb is that the noise should be less than 5%. His is not bad even with the current settings.
Hi,
here is a pic of the unit mounted using double layer of velcro…
I am trying to learn how to read these important graphics using your replies and other posts arround…
Hi,
I will go ahead and update to the above recommended values…
I really need to learn these graphics…
I think the 3 blades setup produce more vibrations and problems than the 2 blades…
I will fly the machine witht the new settings and report if there is any issue…
how to activate the auto tuning after achieving the stable hover?
Thank you
Hi,
I flew the Heli and it’s way better, more stable than before, I’m still little worry bout the vibration or the Freq effecting the unit if there is any. just not good in reading the graphics
is it good enough to take the second step for the autotune? or try out the Hold and the loiter mode?
Thank you