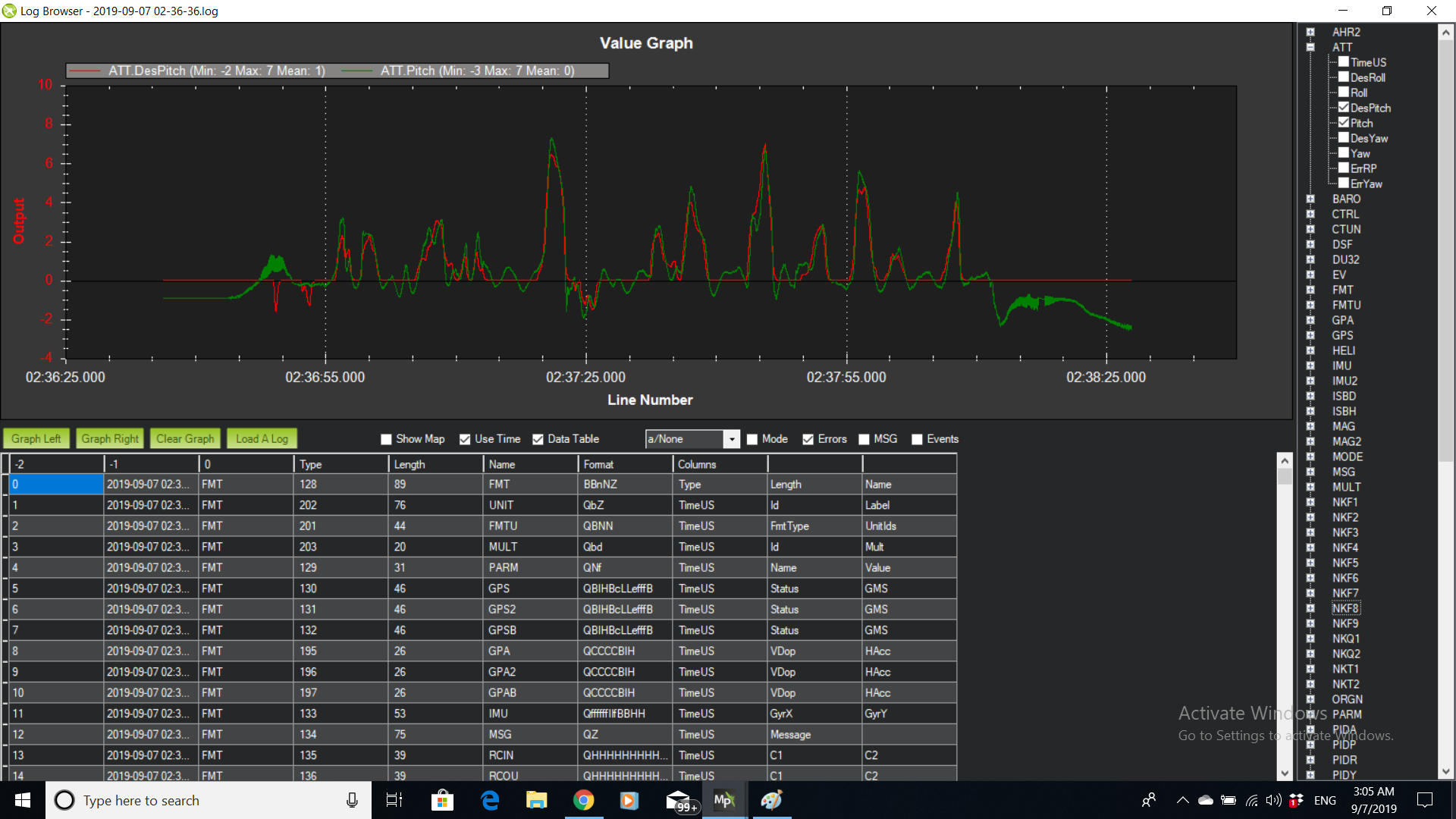
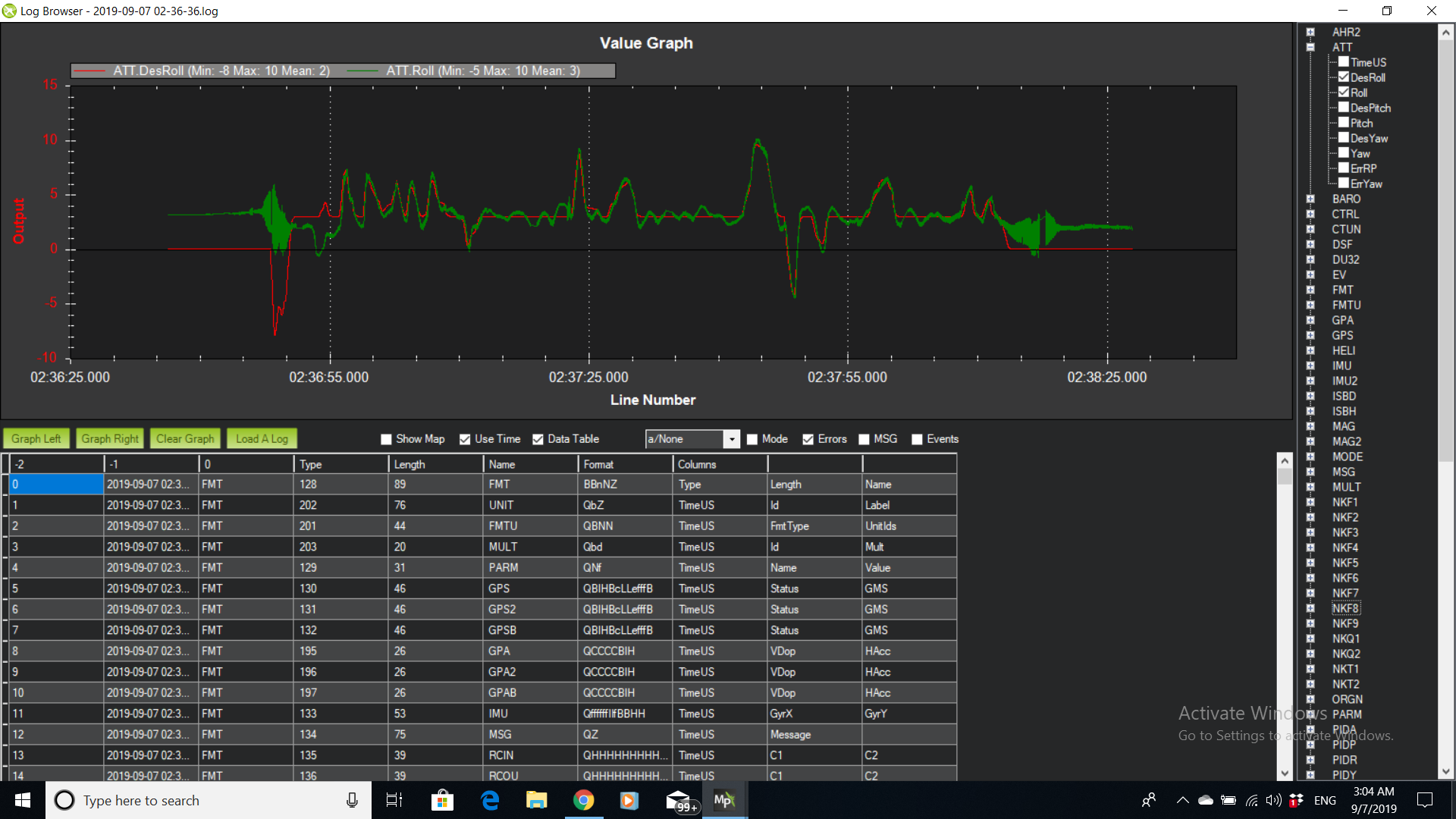
I finally got around to looking at the status. Everything is looking better with pitch following the desired pitch. I think we could change some of the filters to help reduce the noise in the Roll axis. Change the INS_GYRO_FILTER to 10. At this point you may consider increasing ATC_INPUT_TC to maybe 0.2. this will help the aircraft to be able to keep up with the requested changes from the flight controller by slowing down how quickly the requested change can be. You may also consider reducing ATC_ACCEL_P_MAX and ATC_ACCEL_R_MAX to 60000 and see how that feels from a piloting perspective. Right now the aircraft can barely keep up with the requested changes from the flight controller because of the inherent lag in the helicopter response. So slowing the requested changes helps the aircraft to keep up with the flight controller.
I was looking at your altitude and it doesn’t look right. It seems to drift more negative as your flight continues. I don’t know what is causing this.
I also looked at your PIDA message and there seems to be some noise on the measured acceleration. So I would setting PSC_ACCZ_FILT to 10 and also set INS_ACCEL_FILTER to 10.
conduct a hover in stabilize and make sure everything feels ok and you are not seeing any low frequency oscillations. then switch to loiter and see how the altitude hold is doing.
In loiter there is some low frequency oscillations going on there. It is acceptable that the aircraft may wander around in loiter but you shouldn’t see any large (2-3 ft diameter) circular motion over the ground. I have to get more familiar with how to tune the loiter mode. So I’m not much help here.