ArduCopter V4.0.5 (3f6b43e3)
ChibiOS: d4fce84e
mini-pix 0026003F 34365119 34363234
Param space used: 1332/3840
Done six very good flights with around eleven missions, with the ROI forgotten appearing twice, as had appeared here (TradHeli 4.0.0-rc2) and here (Copter 4.0.4-rc3).
Best observed with the tlog captures first and second flight, or with ATT.DesYaw/Yaw, which are coincident:
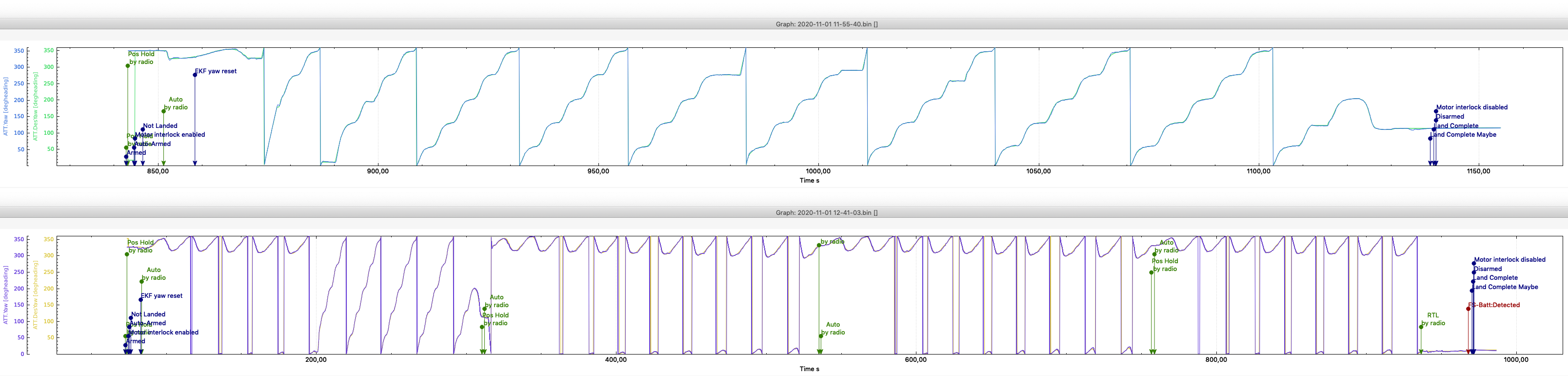
These are the logs:
First flight
Second flight
Note that on the first flight it occurs early, and on the second flight it occurs at the middle of the first mission, and later the mission is restarted and executed three times and it does not occur.
No idea why or when it happens, or how to repeat it. Some arithmetic problem when in a mission? Note that in both occurrences ATT.DesYaw/Yaw transitions from 360 to 0.