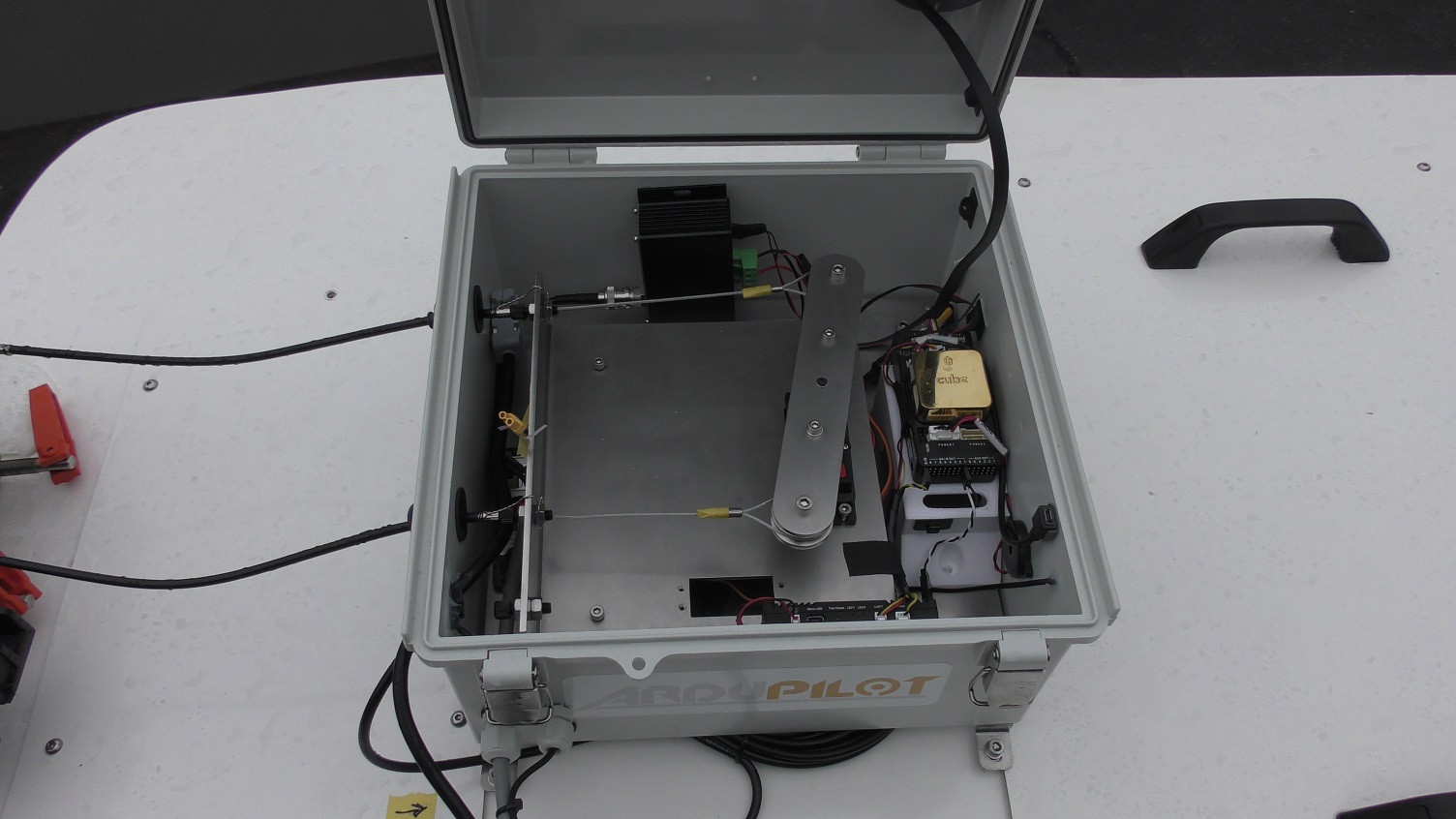
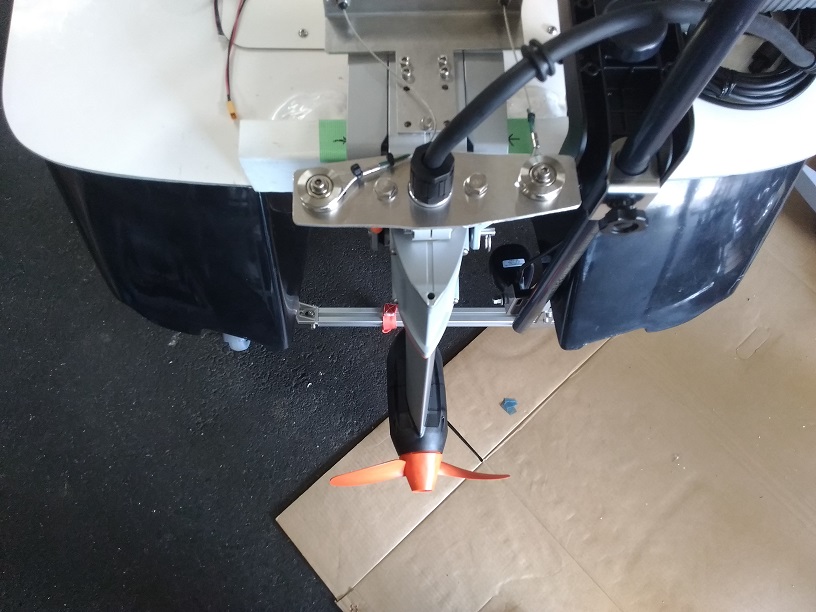
So in this last picture you can see that we’ve removed the battery and tiller from the top of the motor and then attached a collar to the shaft and then attached a horizontal plate to the collar which the two wires to the servo are connected to.
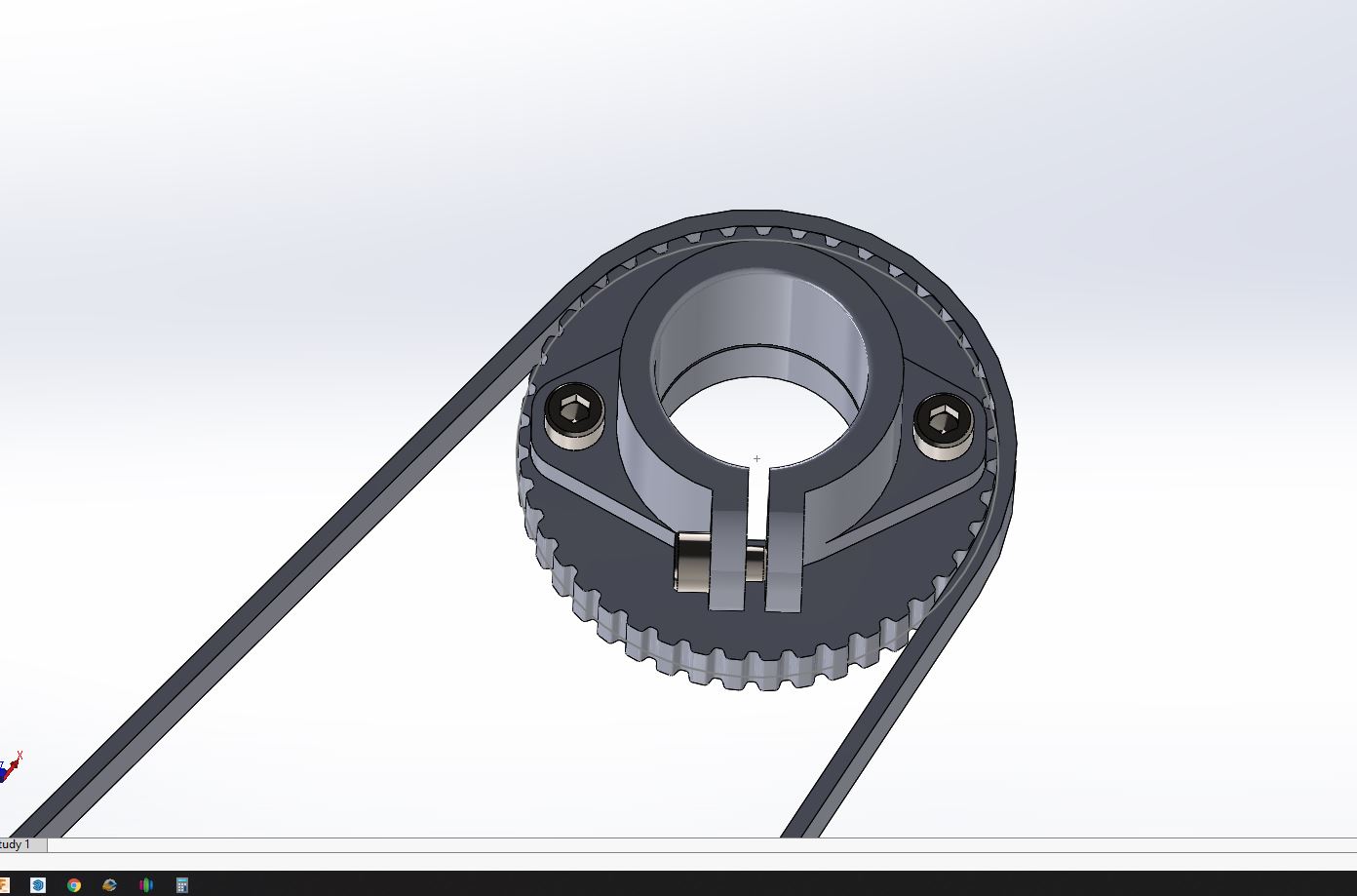
Here are some pictures of the 3D printed steering mechanism so far. It needs some improvements before it will be useful though. For example the gear on the motor side has no upper or lower lip so the timing belt slips off easily.
**** RESPECT ***
GREAT JOB
When we ‘ARM’ the arduboat in mission planner ( Using the Pixhawk Navigation System) in order to set the autonomous mission, how do we turn on the Torqeedo ???
I replied on YouTube but in any case, here’s the reply in case other people have the same question.
Re turning on the Torqeedo, it depends whether or not the autopilot is connected to the torqeedo battery or directly to the motor (e.g. you are using an external battery not the torqeedo battery). If the Torqeedo battery is used then the autopilot (via the RS485 interface board) pulls an On/Off pin high to turn on the battery. If an external battery is used then the motor will always be on. The interface board is described on this wiki page and I hope to start selling it from my company soon. I hope other people and/or companies will make their own interface boards as well.
So the servo motor are connected to RC output(Pixhawk) and set the corresponding Servo Configuration (SERVOx_FUNCTION) to Grounding Steering. Is my understanding right? Can these configuration (Torqeedo and servo steering) run in SITL mode?
I’m trying to build a autopilot boat using Ardupilot and Torqeedo travel series for propulsion. Now I’m facing the steering problem.
You’ll need to connect some kind of servo to one of the autopilot’s PWM outputs (normally MAIN OUT1) and then that servo will need to somehow change the direction that the motor points towards.
I’m afraid that we do not have a simulator for the Torqeedo motor. The default rover that starts in SITL is an Ackermann steering vehicle though.
How much torque is needed to turn the 1103’s shaft (to its ±60° limits, and at about 3 mph (5 kph) or whatever boat speed at which you might know the torque)?
Or, at least, what’s the torque rating of the servo you seem to have used in the first picture (seemingly using a servo directly, and not yet the 3D-printed belt-drive you were working on)?
I’m afraid I can’t precisely remember what the torque rating on the original servo was. It’s a rebranded servo so it is not printed on the case. When I asked AttracLab a couple of years ago I think maybe they said 70kg/cm but I’m not sure. The indended replacement, HS-1100WP, is 100 kg/cm and I definitely remember that it is more powerful than the original.
Was the reason that you changed to the 100 kgf-cm servo that the weaker one wasn’t turning the Torqeedo far or fast enough? (Or did you just end up changing to have spare torque or for whatever other reason?)
(My envisioned application is for a very slowly moving (3 mph?) boat, so I’m not concerned about fast steering (like the ArduBoat’s quick U-turns) or much torque from the ruddering action of the Torqeedo’s shaft).)
My boat is still using the lower power servo because I haven’t actually re-done the steering mechanism. Basically the 3D printed part doesn’t quite work. I’m planning to get back to boats in the coming months.
Update: Slightly loosening the screws in the rubber friction collar around the shaft tube (under the back cover of the mounting clamp/steering hinge) significantly reduces the steering torque needed.
(I don’t know how much Torqeedo might recommend against doing so.)