Usually, our copter flies for 45 minutes, and at the end of the mission, the baro drift is pretty bad (sometimes 5 meters). So I am thinking about using GPS as primary alt source. Is that a bad idea? Today I did a test with ek2_alt_source = 2 and everything worked perfectly. I even uplugged the RTK base from the base station to see what happens if RTK information suddenly disappears. The copter ways continuing to loiter peacefully at a stable altitude.
What is your experience and suggestion on this…? Is it unsafe to use GPS as alt source?
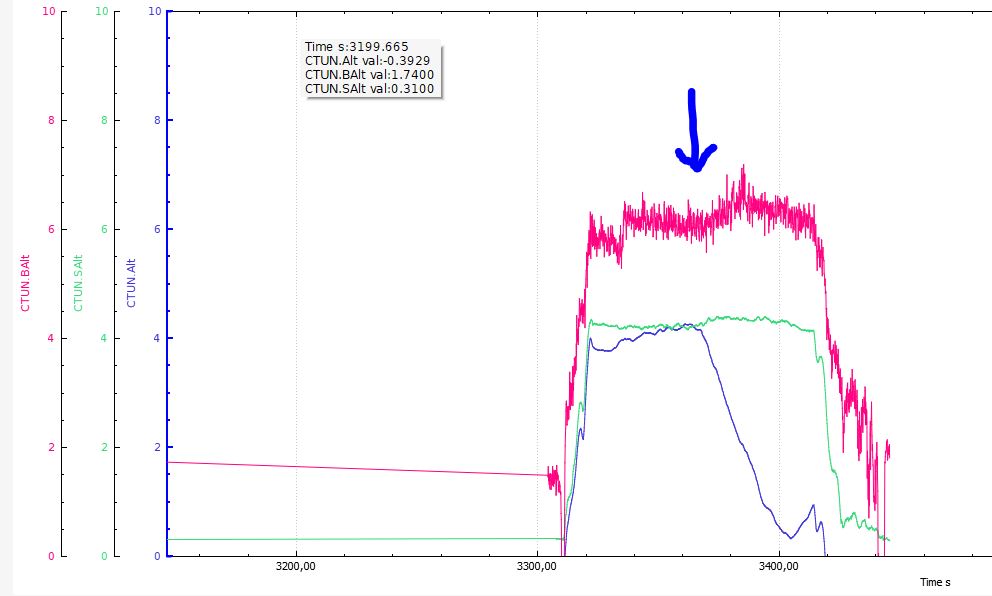
I have one more question after a quick test: EK2_alt_source is set to 2 (GPS). I am loitering at 4 meters height. Then, I am disabling the RTK base station (pulling out the USB cable, see blue arrow in the picture). The GPS altitude goes crazy, but the copter stays at 4m height, which is very good. What happened here? No error message or warning was displayed. It seems that arducopter silently changed the primary alt source…
Great job!
I have done some test of EK3_ALT_SOURCE = 2(GPS)using RTK,copter really flied great with a very stable altitude, but really worry if there will be any problems. But I will do more test to research.
I found this thread today when i was searching for information about the EK2_ALT_SOURCE Parameter.
@Willa Funnily enough we are now developing kind of the same drone:
4kg AUW (or more), 1kg payload (or more),
over 60min flight time,
16 - 18" Props, …
just some kilometers away from you in Austria .
I use Here3 GNSS on the Drone for flying with RTK (but sometimes without RTK).
Do you have experience now flying with the parameter EK2_ALT_SOURCE = 2 set all the time?
Is it generally safe to set this parameter anything else than 0?
Anything to be aware of before i try it in the field?
Hi Lukas, I am now using the baro for altitude, because I think it is much less likely to glitch. I had some smaller GPS glitches when flying close to metallic met masts, so I feel much safer when I know that altitude will never glitch (but only slowly drift).
What’s the purpose of your copter?

 .
.