Thnaks a lot iampete. 

Hi,
We have quadplane like skywalker x8, How we set Specific tuning parameter Due to the wing span (2.4m) and other feature?
And it have different in plane or quad mode?
Thanks.
which flight Transmitter and Receiver have you used for this flight?
i am failing to get this movements on my Pixhawk using Taranis X9D transmitter with a X8R Receiver
sorry to pull this old topic up but where I get that Mozart blog please?
@tridge @GregCovey
Hello tridge
Hello Greg
We have a VTOL with 4 tilt rotors. Our tilt mask is 15. But when I change the flight mode from manual or fbwa to qhover or qstabilize (pusher)rear motors don’t move at all. I’ve checked the servos from another function and they are working properly. Also front motors tilting when flight modes change but rear motors are sometimes stuck on trim value sometimes doesn’t even have any PWM value from ardupilot( I am checking from servo output page). Am I missing something simple?
Please help us.
HI Rolf
As I can see you Have achieved what I am trying to get on my VTOL configuration. Got some Issue with tilting mechanism on both front motors. When switching between QSTAB and FBWA motor are tilting like 20 degree maximum at very slow peace. I know how to change tilt rate but amount of tilting is the one that concern me the most. As far as I have noticed they should point straight up. Any idea on what might be the issue? Same thing happens on 4.17 and 4.3.1.
Hi Jakub,
First I would install the current 4.3.1 stable.
I assume that it is a vectored yaw Tri-Tilt with the two front motors tilting.
So it does not need SERVO11_FUNCTION,41 (Tiltmotors) and SERVO7_FUNCTION,39 Motor7/TailTiltServo.
I would disable both of them. The Q_TILT_MASK would then be 3 instead of 7. (If the rear motor is also tiltable, this is motor 4, the Q_TILT_MASK would be 11 and for tilting you would need SERVO11_FUNCTION,41 for the rear tiltservo.)
I assume that you have adjusted the front tilt servos correctly:
Tiltrotor support for plane - #374 by Rolf
QuadPlane Setup Tips — Plane documentation
The motors only tilt forward about 20° because you set Q_TILT_MAX to 22° . Set this to a reasonable value and be sure to reduce the tilt rate Q_TILT_RATE_DN from 90 degrees per second to forward flight, because I can’t imagine that your VTOL accelerates so well that it accelerates to transition speed at that tilt rate without diving steeply.
To test the full servorange on the work bench you can switch to MANUAL mode (but not in flight!).
Good success
Rolf
1 Like
I’m not sure if its the same thing, but I saw something similar when I tested my T1 Ranger VTOL yesterday, I switched to FBWA and the rotors tilted forward a bit but not all the way, but I noticed on that there was a message “Waiting for transition” - because the plane wasn’t going fast enough.
I changed ARSPD_FBW_MIN to 10 (10 m/s) and after clicking FBWA throttled up and the transition completed. Then the motors tilted all the way forward and the plan started flying beautifully.
1 Like
This is the intended behavior. The tilt servo is tilted with Q_TILT_RATE_DN degrees/second to Q_TILT_MAX degrees and waited there until the transition speed is reached.
2 Likes
Thanks guys for you inputs ![]() done it! Had to tweak trims in servos and th was all. Those class frame to be honest do not know how they ended up like this ;/ Vtoling with no problems now it is time for transition.
done it! Had to tweak trims in servos and th was all. Those class frame to be honest do not know how they ended up like this ;/ Vtoling with no problems now it is time for transition.
1 Like
Hi Rolf,
Were you able to get vectored pitch for your plane? I am currently making a similar model and trying to get it work with vectored pitch. Currently I got it working with vectored yaw.
Regards,
Jian Wei
Hi Tan Jian Wei,
welcome to the VTOL section. What do you mean by “vectored pitch” exactly ?
Rolf
Hi Rolf,
Do you think it is possible for the tiltrotors to tilt forward and backwards during pitching in multicopter mode in a quadplane configuration.
Regards,
JW
@tridge @GregCovey
Hello tridge
Hello Greg
We have a VTOL with 4 tilt rotors. Just after the transition from VTOL to plane(when ‘transition done’ message occurs) our motors shut down for a while then start again. This situation results in altitude loss. We have tried to optimize Q_TRANSITION_MS parameter, but did not work. Our tilt parameters are:
Q_TILT_MASK 15
Q_TILT_TYPE 2
Q_TRANSITION_MS = 2000
Q_ASSIST_SPEED = 0
Q_TILT_MAX 45
Q_TILT_RATE_DN 20
Q_TILT_RATE_UP 20
We think its because the Q_TRANSITION_MS parameter we have tried fixing it to 0 but this time motors shut down even during the transition. Please help us.
Sadly Greg Covey passed away almost 1 yr ago.
Hello,
I am trying to built tiltrotor quadplane with 4 motors and only front 2 motor will be tiltable. but i am little bit cunfused about servo outputs. So someone can tell me that my setup is correct or not?
Regards.

This looks good. You should set Q_TILT_MASK to 5 (if only motor 1 and 3 are tiltable)
Rolf
1 Like
Hello, @iampete @Rolf @tridge @iforce2d
I am working on a project where we are building a Tilt rotor VTOL. There are total 6 motors. 4 are tilting and 2 non-tilting. There are total 4 servos for aileron and a V tail.
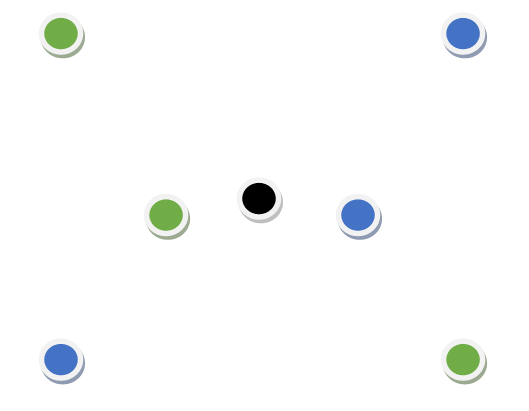
blue are clockwise and green are counter clockwise. black is CG.
1 top right
2 top left
3 bottom left
4 bottom right
5 left to CG
6 right to CG.
the outer motors are symmetric but not at 45° angle from the CG. and two motors near the CG are little behind of CG.
The motors near the CG are smaller compare to the tilting motors and takes only 20% of MTOW while other four take 80% of MTOW.
I am using pixhawk 6C with arduplane C4.3.7 (2d1a8a28) and mission planner 1.3.80.
Could someone please check whether the servo allocation are correct or not?

I used ‘Multi-rotor motor mixing calculator’ website to calculate the motor matrix.
add_motor_raw(AP_MOTORS_MOT_1, -0.999, 0.802, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 1);
add_motor_raw(AP_MOTORS_MOT_2, 1, 0.802, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 2);
add_motor_raw(AP_MOTORS_MOT_3, 1, -0.779, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3);
add_motor_raw(AP_MOTORS_MOT_4, -0.999, -0.779, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 4);
add_motor_raw(AP_MOTORS_MOT_5 , 0.63, -0.023, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 5);
add_motor_raw(AP_MOTORS_MOT_6, -0.632, -0.023, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 6);
https://github.com/ArduPilot/ardupilot/blob/Plane-4.3/libraries/AP_Motors/AP_MotorsMatrix.cpp [line 500]
add_motor_raw(int8_t motor_num, float roll_fac, float pitch_fac, float yaw_fac, uint8_t testing_order, float throttle_factor)
As you can see, there is no throttle_factor in the code generated by the website.
Should I change to (0.1 and 0.2 at the end of line)
add_motor_raw(AP_MOTORS_MOT_5 , 0.63, -0.023, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 5, 0.1); [small motors (take 10% of MTOW)]
add_motor_raw(AP_MOTORS_MOT_3, 1, -0.779, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3, 0.2); [big motors (takes 20% of MTOW)]
and should i add this to AP_MotorsMatrix.cpp or AP_MotorsHeli_Quad.cpp?
1 Like
I was hoping someone could help with my problem. I have a tricopter plane, what parameters should I use to stop the rear motor on FBWA mode? because I have a problem when FBWA mode the rear motor keeps rotating at the same speed as the 2 front motors even though I have used the same parameters as your tutorial?