Hello Pete
The oscillations are probably caused by too high Q_A_RAT_PIT_P and Q_A_RAT_ROLL_P gains.
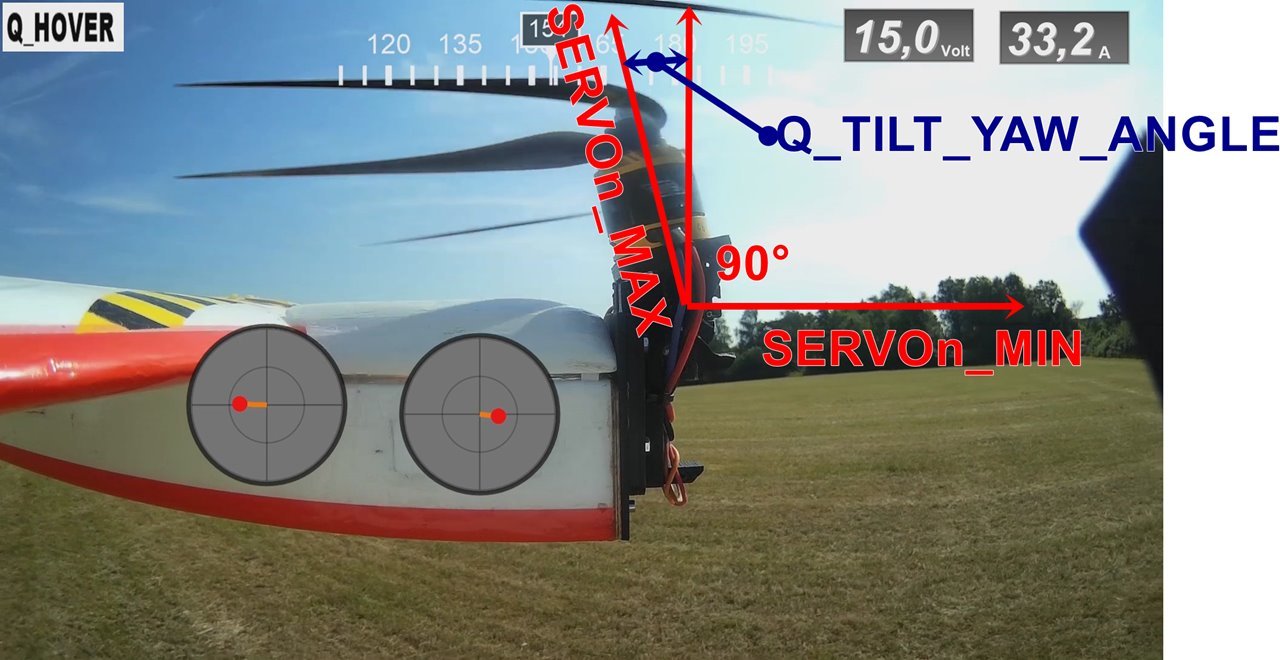
Vectored yaw - make sure you have specified your Q_TILT_YAW_ANGLE correctly:
(SERVOn_MAX/MIN may be interchanged depending on how the servo is installed)
Regards Rolf