congratulations! Great to see it flying
A dataflash log is preferred instead of a tlog.
For stabilisation, you need to check all the directions are right in a hand-held test, with the sticks neutral:
- when in QSTABILIZE mode, roll the vehicle right. The right motor should increase thrust, the left motor should decrease
- then roll it left, the left motor should increase thrust, the right should decrease
- then tilt the nose up. The rear motor should increase thrust
- then tilt the nose down. The rear motor should decrease thrust
- now rapidly yaw the vehicle to the right (so nose goes right). As you start to yaw it, the right motor should tilt forward, the left motor should tilt back
- now rapidly yaw the vehicle left. The left motor should tilt forward, the right should tilt back
Then do all the same tests, but on without holding the vehicle, instead have it on the ground, and use the sticks. Use a small amount of throttle, but not enough the take off. Check that as you use roll, pitch and yaw that the motor outputs are trying to move the vehicle in the right direction.
1 Like
Thanks for the feedback and apologies for my ignorance. Which channels do my motor controllers plug into? Which channels do my servos plug into? What parameters do I have to set to make that work. Is there documentation which describes this setup, and also what tilt masks are available?
10ga wire and xt60 connectors on my battery werent nearly enough… Solder melted off the power module and sprayed the open connectors on my pixhawk. Bridging some of them. Just ordered some xt90 connectors so ill see how that goes.
Did you ever get the fireFly 6? Very interested to read your observations. I have a FF6 with AVA and am considering a switch to plane.
One of the features birdseyeview markets is wind assist. Do you have any thoughts about how this capability compares to wind corrections with plane?
Generally I am happy with Ava, but I don’t like that they stripped out mission planner functions.
Thanks for all your contributions to this community.
Dave
Meanwhile, we are fully satisfied with the tiltrotor firmware.
Next, Walter and I want to transfer the experience to a high-performance plane.
For the medical express 2018 unfortunately the preparation time for us is too short,
so we wish tridge and his team all the best. 
in tilt quadplanes, allow tilt of motors to be used for forward thrust,
@tridge, is this already in beta6?
hi everyone, plane 3.8.0 is finally out, and I’d like to say a big thank you to everyone who tested tiltrotors for this release, especially the ground-breaking testing by @Rolf
I’m sure we will have a lot more improvements to come with tiltrotor quadplanes, but this is a great milestone!
Hi Tridge, i would like to extend the thanks to my colleague @Walter, who designed and built “Mozart”. Thanks to you especially because during all the time with ever new master versions, there was not a single accident due to software errors !!!
Congratulations on this great release.
Rolf
yes, thanks to @Walter too for the great build!
The new docs for 3.8 include some more documentation on tilt-rotors:
http://ardupilot.org/plane/docs/guide-tilt-rotor.html
I think this could be expanded a lot. If there is anyone who would like to help improve the docs that would be much appreciated. Perhaps we should start with some diagrams, or pictures of real setups?
Is there anything in the code to use differential thrust for yaw control? My max bank angle is already 45 degrees and I’m doing B52 traffic patterns.
there is support for that in normal twin-motor planes, but not yet in tilt-rotors. It isn’t hard to add though.
Is your plane a tilt-tri?

You should blog that: it’s very cool!
Arduplane tiltrotor firmware compensates for even pilot failures:
Rolf
1 Like
great video! thanks @Rolf
I did my first hover of a FireFlyY6 yesterday
I’ve had this plane for a while, kindly sent to me by Andy Trench. We finally got the build finished on a Saturday CanberraUAV build day, and did a first hover on Sunday.
The plane hovered fine, but the battery voltage and current has me stumped. I used the recommended 3S batteries, which are the high-capacity 3S multistars, 5.2Ah, two of them in parallel (one in each wing). In a 90 second hover the battery voltage dropped from 3.9volts/cell down to 2.6volts/cell. We landed it at that point as the voltage was well below the danger level.
The current logging shows a current draw in hover of around 80A, which is a lot more than I expected. Total power draw in hover was around 700W.
We’re clearly going well past the C rating of the battery, which is surprising as this is the recommended battery setup. Has anyone else flown the 3S default setup with the FireFly6? If so, do you have a flight log you could share so I can look at the voltage/current?
Cheers, Tridge

Tridge,
Thanks for the post. I am excited to see your progress. I’ve been thinking about ditching AVA for arduplane for quite some time.
Not sure about the recommendation for 3s batteries. Mine was shipped with two 5200 6s batteries.
Not sure if this helps you, but below please find a link to a log file from a recent FireFly6 flight.
Dave
Hello All,
I am new in the RC business, but I am working on a special tilt-rotor design, and plan to control it with QuadPlane. I have read through the tilt rotor doc, and as I see, not all functions are available, what I will need for it. How do you see?
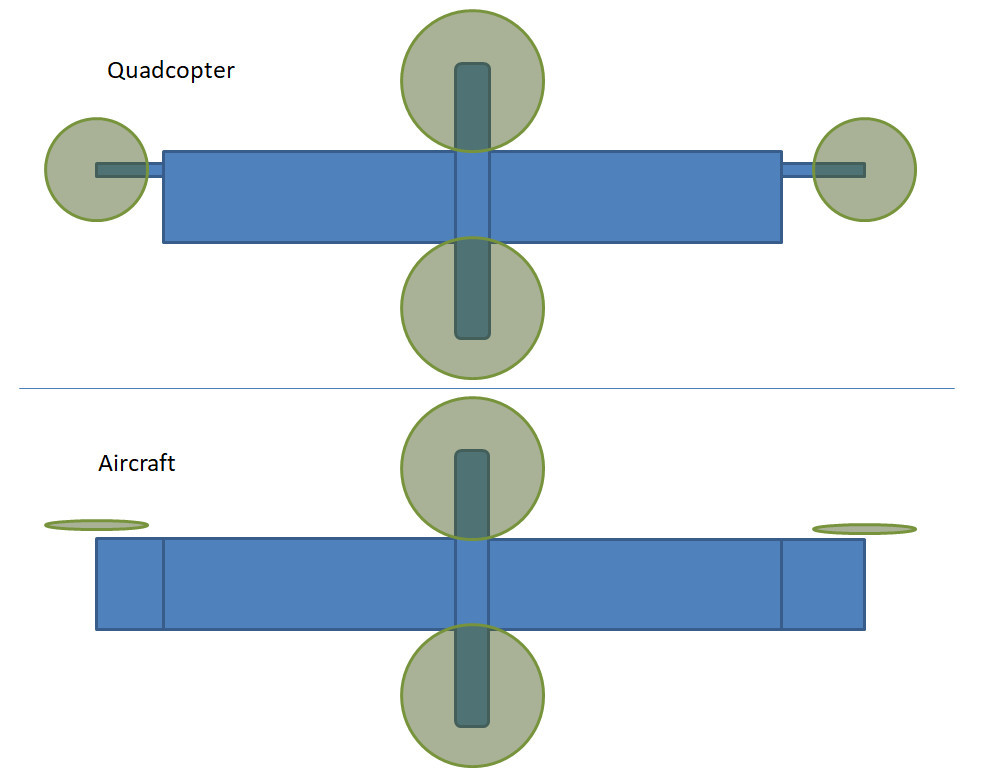
The vehicle is a mixture of a + quadcopter and an aircraft. There are 2 rotors over the fuselage, and 2 others at the end of the wings. The 2 wing-rotors can tilt independently to work as prop or control yaw. The rotors are driven by a petrol engine, so all rotors have the same RPM. The angle of the rotor-blades is adjustable by servos. It does not have conventional aircraft control surfaces, because I would like use the rotors and the tilt wing-ends to control the aircraft mode as well. The main rotors are rotating also in aircraft mode, but the angle of the blades are around 0 deg, till no pitch control is needed. The main rotors can also help out the wings during transition to make it more safe.
Thanks
Laszlo
Lazlo, perhaps post some photos and/or video of your aircraft as well: it’s a pretty impressive build, and it would probably benefit you if people knew you were ready to test fly, rather than just having a “good idea” with some sketches.
Just a suggestion