Wow, that is a big VTOL! It is similar in size to Tridge’s plane with gas-powered forward flight.
My technique for a mission plan may be considered “old school” by now. I started with FireFLY6 plans and converted them (where needed) to APM plans in Mission Planner. The QuadPlane design for missions is slightly different. You can see the difference between mine and Marco’s when he is using the latest 3.8.0b5 build firmware. Perhaps Tridge will comment from his developer and extensive autonomous experience.
So i had time to test today. Although the servos are now working for vectored yaw, I still have problems with the motors
In Q_Loiter and FBWA I have no power to motors at all, only MANUAL mode.
@tridge I’m using your parameters i dont see anything that would make this happen. and youre not having this problem so does anyone have any ideas?
hey Greg i have done transition with the two motors successfully on land but i have a problem , my tilt yaw servo in qstablized mode have no response for anymotion of my rc stick motion , could you help me with that ,
thank you
thanks Greg
i have a little problem in Q_stabilize mode the aileron servos work and elevator too but in tricopter platform those servos must be off , anyone have deal with that problem before ??
I’m a ArduPilot user in Japan.
I tested QLOITER by replacing E-Flight Convergence with Pixhawk v1.
This is a test video.
I would like to try AUTO next time. I have three questions.
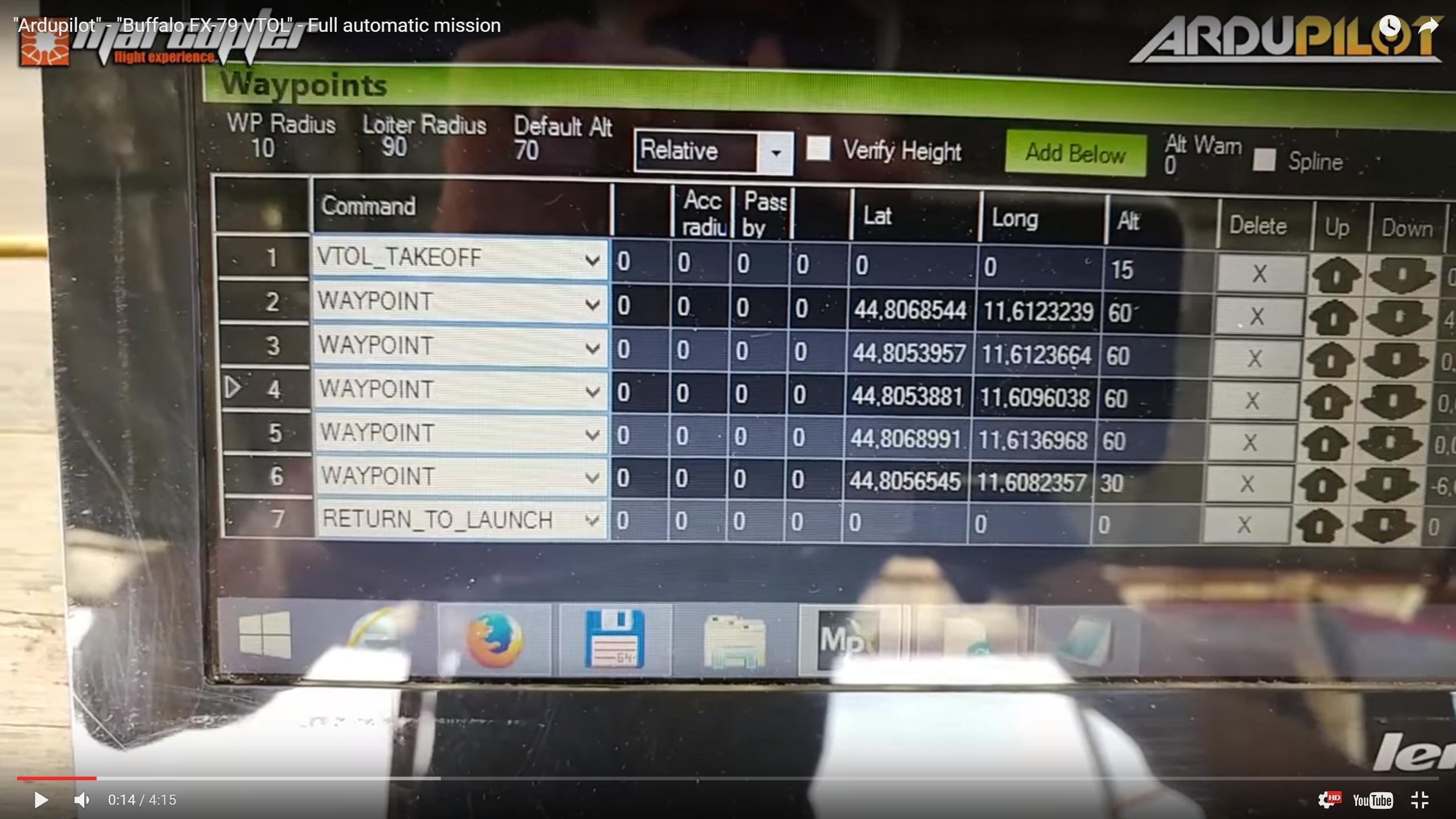
· Is this the Waypoint setting correctly?
· Is DO_VTOL_TRANSITION mandatory?
· Will the motor return to vertical automatically with RETURN_TO_LAUNCH?
1, VTOL_TAKEOFF
2, DO_VTOL_TRANSITION
3, WAYPOINT
4, WAYPOINT
5, RETURN_TO_LAUNCH
@Rolf@tridge
I made some decent progess and finally did a ‘maiden’.
I still need to mess with the PID a bit.
this was actually the second test. the first one, the rotors are tilted forward too far in hover rest position, so it wants to always creep forwards, and i tried to change the servo function trim and they dont move…
so i changed the tilt angle back to 0. but when they are at 0, vectored yaw doesnt give any output… so i tried 1 degree, and i get a HAIR of movement… almost as if the tilt angle number represents also how much vectored yow control you have too… i tried -5 and it doesnt like that lol.
so i have two questions. how can i get the tilt angle to be 0, and get vectored yaw?( or how else can i adjust the hover rest position of the motors?)
and also how far along is the [motor tilt to control forward movement] code coming? I’d much rather use that to transition forward as i want my aircraft to remain level while transitioning…
The oscillations are probably caused by too high Q_A_RAT_PIT_P and Q_A_RAT_ROLL_P gains.
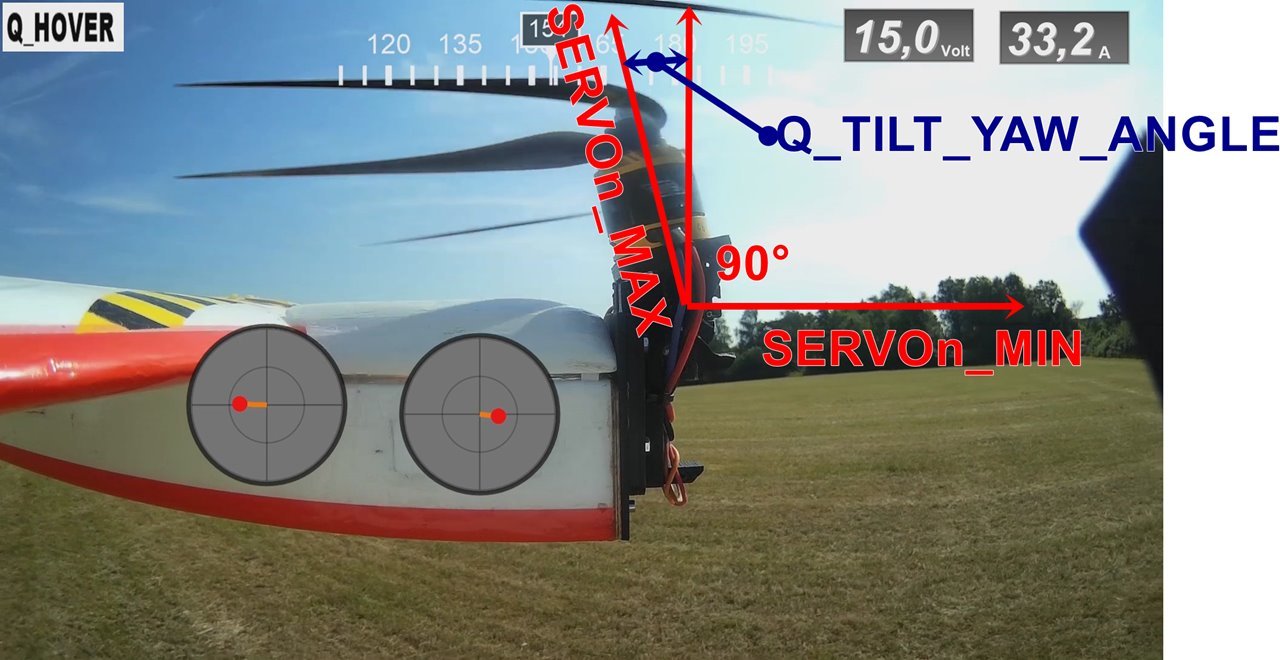
Vectored yaw - make sure you have specified your Q_TILT_YAW_ANGLE correctly:
(SERVOn_MAX/MIN may be interchanged depending on how the servo is installed)
what youre showing me seems to make sense, but im seeing the opposite in my set up…
the higher the tilt yaw angle i put in, the further forward they go, rather than back!
It initially tries to centre both rotors (ie. both pointing straight up). To do that, it needs to work out what PWM it needs to put in to achieve the centering. If you look at the nice diagram from Rolf, you’ll see that as Q_TILT_YAW_ANGLE increases that the PWM needed to make the servo vertical moves more towards SERNOn_MIN.
The way the maths works is this:
for an example, lets assume Q_TILT_YAW_ANGLE is 15
it knows that at SERVOn_MAX that the servo is at -15 degrees (15 degrees angled back).
it knows the total angle the servo goes through it 90+15 which is 105 degrees
so to get it straight up, it needs to move the servo to SERVOn_MAX-(15/105)*(SERVOn_MAX-SERVOn_MIN)
As you can see, if you increase Q_TILT_YAW_ANGLE without actually changing the servo movement then it will cause the rotors to tilt fwd more.
In other words, Q_TILT_YAW_ANGLE is something you measure about the frame, not a desired angle. If you want to change the desired angle you need to move the servo endpoints.
no, it is only rarely used. Normally you set Q_ENABLE=1 and all waypoints are treated as fixed wing targets. You only need DO_VTOL_TRANSITION if you want some waypoints to be multirotor
not by default. It will do that only if you set Q_RTL_MODE=1
@tridge thanks a ton for the clarification.
I got it all working the way it should! Now I am having a problem with the PID. I got the osilations out, but the thing wants to flip forward on takeoff…
either the controller isnt listening to the accelerometers and gyros and wont correct, or i have my PID gains all wrong. (which i dont understant because shouldnt it be at least barely flyable with the stock PIDs?
OR my rear prop is overpowering for some reason… @rolf have you had anything like this happen to you while setting up?
What is the best method for tuning a scratch build tricopter with vectored yaw!?
seems like any adjustment i make does nothing…
Thanks!
ill attach a log. Very confused, the thing wont keep itself in the air. I cant lift it off the ground because it wants to just flip straight forward, so i hold it with my hand and keep it level and give it throttle and it will be just barely okay in the air, but if i try ot let go, it wants to spin in either direction(inconsistent) and the left side usually dips down. basically it cant takeoff right and it wants to spiral crash .
in thought the autopilot should just stabilize itself? then the tuning dials in the control ‘feel’???
Im in Q_Stabilize
I moved the CG rearward a bit and it helped it from flipping forward, but the thing still doesnt want to stabilize and fly in the air on its own at all…
any ideas?