I missed your post above. I have two FF6s, one is set up for 3s and one for 6s. I can confirm that your power draw around 700w is correct. I suspect that your Multistar packs are probably bad. Many of the Multistar packs have been found to be over-rated on their 10C discharge capability. That being said, I use the same packs but mostly for the more efficient 6s setup.
This winter, I will also be interested in converting my 3s setup to APM. I may even convert it to 6s since my SunnySky motors have dropped in price. Here is a video of the 3s maiden flight from February. I could pull the logs from it if you like.
That is really a lot, well it depens about what is your AUW at take off , obviously.
With my dual motor tailsitter. 1000g AUW, I was surprized by the small difference between vertical and normal flight.
I must say that my setup is a bit weird :4S battery, custom 650 kv Keda motors I had from an old project and 11" Graupner E-Props.
yes please! A DF log showing hover and transition to fwd flight for the 3S setup would be much appreciated.
I should be getting the 4Ah 30C 3S batteries in a few days. I’ll do a test flight with those once they arrive. The 10C 5.2Ah batteries may be OK to use, but I’m just not confident enough to risk it, especially for the reverse transition and landing. I don’t know at what voltage the ESCs will start cutting out.
There were two logs so I must have flown it a second time. The logs were too large to post here so I hosted them on my site. The 11.bin file from 2/22/2017 is from the video above. The 12.bin is likely from a large open field nearby where I need to take-off and land in a very small area.
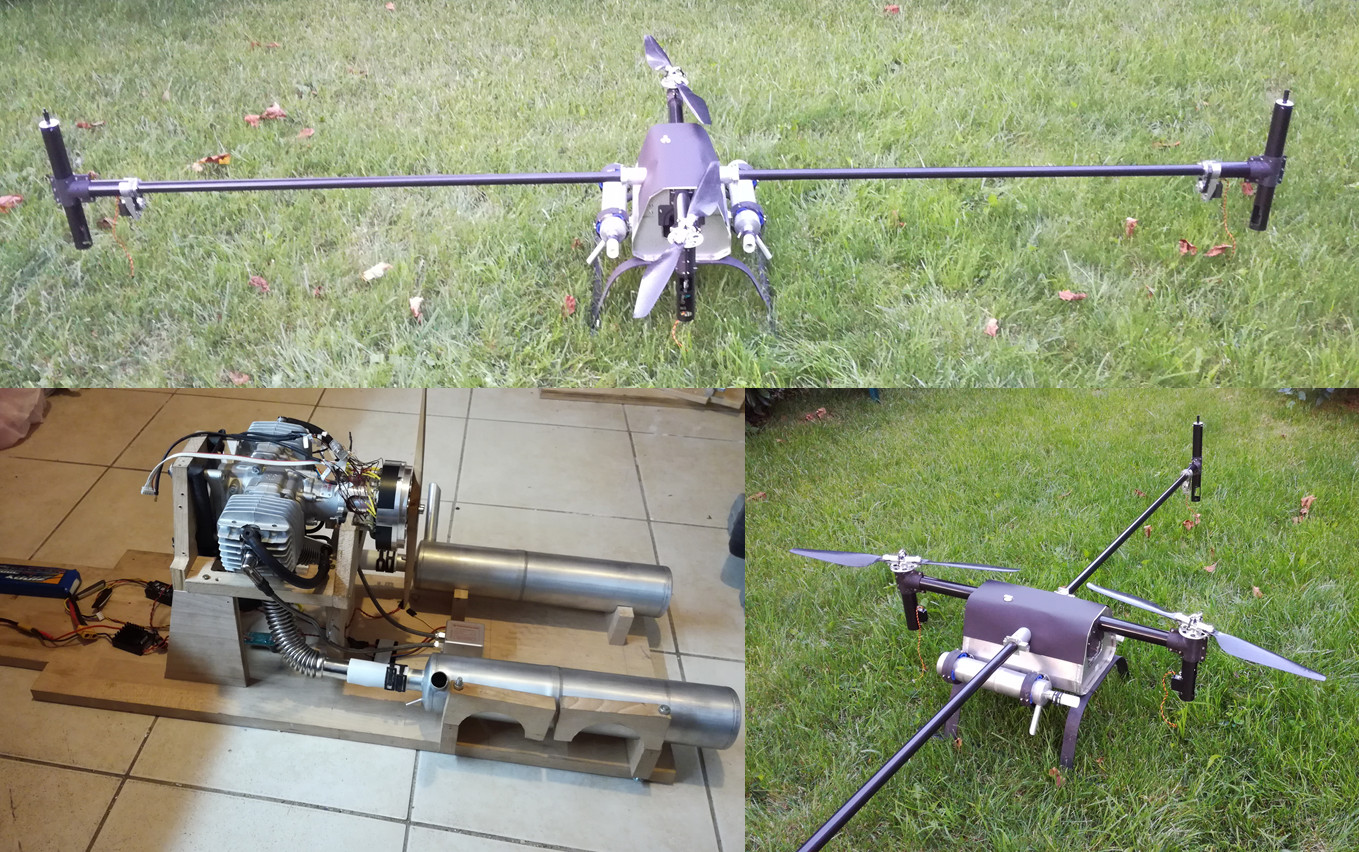
Ok, good idea. You can see below, how the project looks now. I cannot tell, it is ready to fly, but hopefully it is going to be in some weeks.
The mounting brackets are finished for the engine, but it is not installed currently. I have assembled the engine to a test bench, because I am planning to test a new electric control unit for the starter-generator next week (the prop is just for cooling on the test bench, normally it is replaced with a centrifugal clutch). It is 3W-110iB2 engine.
I am getting the new exhaust pipes and some more missing parts in September, so I can start to test of the middle part (without the wings). I dont want to fly with it first, but I have an other test bench, where the plane can rotate in all 3 directions, but I can lock the axles one by one. Tomorrow I will fix the middle part on the test bench, and upload a photo. It is not the same as in the air, because the rotating point is not in the weight point of the plane, but it is good enough for the first tests.
thanks, that’s very useful!
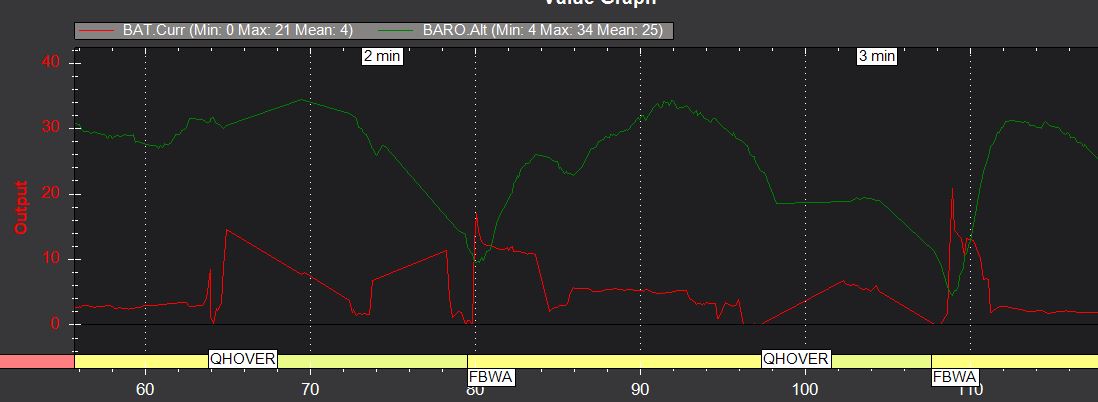
Your battery voltage doesn’t drop nearly as much as mine did. Your log shows the battery dropping to 3.4V/cell during takeoff and transition, whereas mine dropped to 2.5V/cell. That must mean you have a lot better batteries. Can you take a photo of your 3S batteries to show me exactly what sort they are?
It’s also interesting that your rear motors are at 1600 in hover whereas the front motors are at 1300. I’d normally call that quite tail heavy, but I presume that is by design.
Cheers, Tridge
This is the battery meant for the stock bays in the FF6. It is what I use. The SKU # is 912700001-0. The price ranges from $32 down to $17 on sale or about half price.
Well,some of us from multirotors know these as Multisags Tridge.Useful weight saving over higher discharge packs but not exactly as cute as a kitten.I’ve had balance leads dissolve (they just disappeared one night) but not had one let me down yet.It can get a bit scary monitoring the voltages on one of these when in flight though (as you’ve found) but they recover very quickly once landed.I’ve not heard of one letting anyone down due to low voltage but I don’t get out much.I’ve switched to the Turnigy Graphenes for my bigger copters.
I own the same batteries that are absolutely not good for high C discharge.
You should consider at best as 4 C as burst and 2 C for continuous discharge.
I can also confirm these batteries are just plain duds, to put it nicely.
Originally performing well but on regular use they suffer from cells going bad, premature voltage sag, and reduced capacity.
This was typically under 4C loads.
Voltage sag is so bad that it takes as little as 10 seconds from the usual battery warning voltage to no power to stabilise.
Keep in mind that the FireFLY6 DIY15 quickly went to using the 3s Lipo packs in series in the more efficient DIY30 6s version. It can carry a 2.5lb payload for mapping, video, or FPV. It would be great to see some manufacturer release a payload-capable QuadPlane-ready or Tilt-rotor ready ARF.
With some new 4Ah 30C batteries we had some successful flights today with the FireFlyY6
First a hover test:
then first transition flight:
We also did a couple of auto missions. Unfortunately the video isn’t complete for that, but I’ll try to piece something together. In the AUTO mission it has quite a lot of instability during the landing descent. I’m still looking at what caused that.
Many thanks to Andy Trench for supplying the FireFlyY6 to test with!
Was the FF6 pointed into the wind during the landing descent? It really hates wind at its back.
I would love to see you post some more details including the .param file. Are you using v3.8.0 firmware? What battery packs did you choose that fit in the stock bays? Was your transition flight from QSTABILIZE to FBWA or Manual?
I flew my FF6 DIY15 last weekend and one of my main beefs is that the pilot is limited to a minimal roll angle requiring very large shallow turns. This makes it tough to fly in smaller fields.
I am ready to convert my DIY15 model and then later on try converting my DIY25.
It wasn’t, and I did suspect that was a large part of the problem. I did enable the weathervaning (using Q_WVANE_GAIN of 0.1), but that wasn’t enough to bring it into the wind. Part of that is probably that I need higher yaw gains, but I also wonder if the shape of the firefly tends to make it weathercock with the nose out of the wind (due to wind drag on the nose).
I used 3.8.1 firmware (the flight was part of my pre-release testing of 3.8.1).
My full parameter set is here: http://uav.tridgell.net/tmp/firefly6.parm
but as I improve the tuning I’ll add it to the frame parameters in the main git tree.
First transition was from QHOVER to FBWA then FBWA back to QHOVER after a few circuits. The 2nd and 3rd flight it was a full AUTO takeoff and auto transition.
The transitions were no problem at all.
I plan on adding differential thrust for faster turns on tiltrotors soon. We already have it for dual-motor fixed wing, it just needs some mixing work to make it work for tiltrotors.
I have received my Pixhawk, and started to setup, but immediately meet with an issue. I cannot set Q_FRAME_CLASS to 0 (Quad). If I set it, after the reboot it changes back to 1 (Hexa). I can set all others (1-4), and they stay in, except 0. Is it maybe a bug?
ArduPlane V3.8.1
MP 1.3.49
my apologies, that is a documentation bug leftover from 3.7.x. In previous firmware Q_FRAME_CLASS of 0 meant quad, now 1 is quad. I have fixed the documentation.