[quote=“Ali_Reda, post:342, topic:8805, full:true”]
is it by changing some parameter or , change from flight mode to another[/quote]
Changing from QSTABILIZE to FBWA starts the forward transition and changing back to QSTABILIZE initializes the backward tranistion.
1 Like
thanks Rolf for the quick reply , iam so greatful 
Hi , Rolf
i need your he
lp in one problem , after i loaded the parameter list , there is many parameters in Q parameters are hidden , could you help me in that , thank you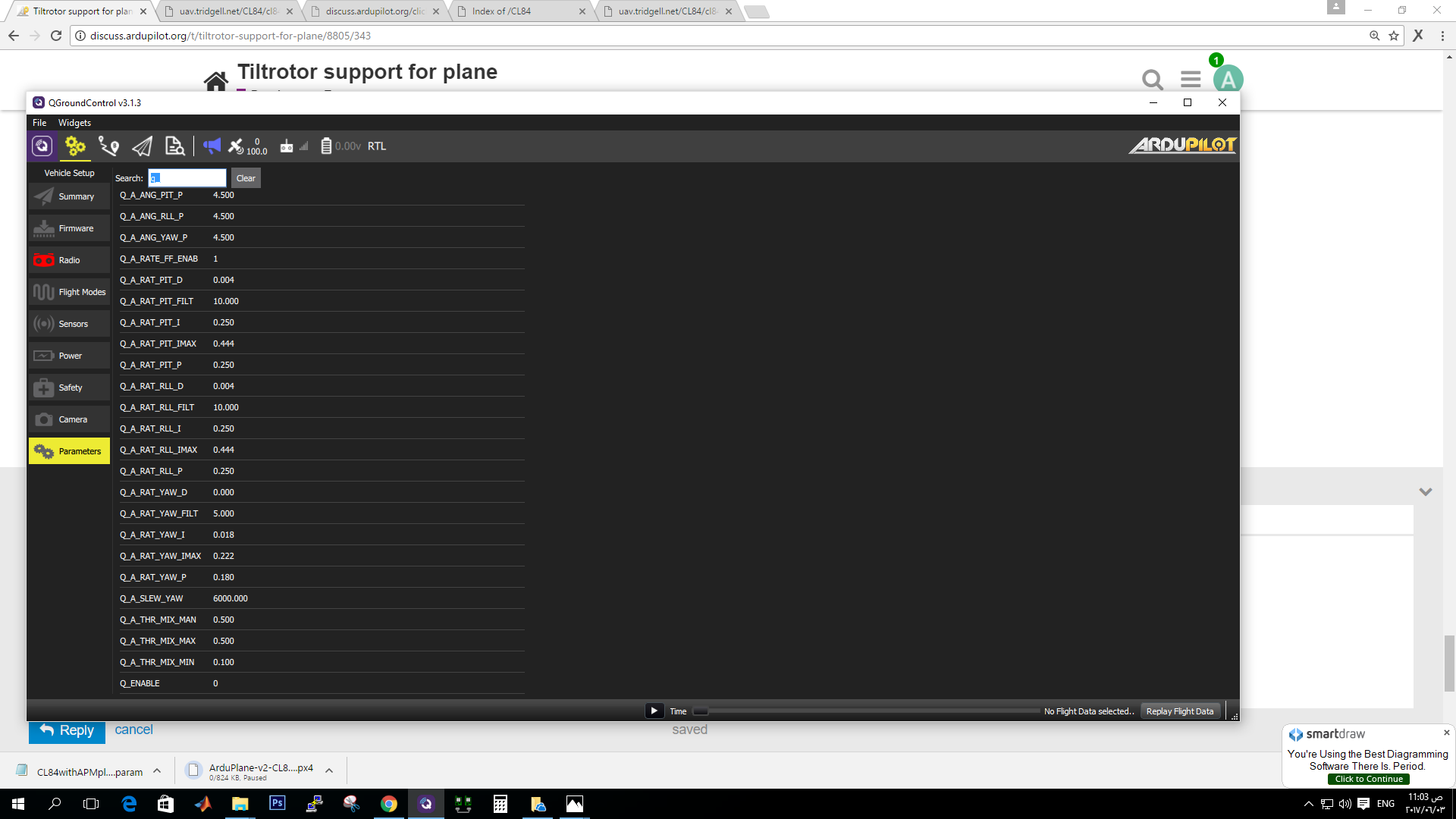
Ali_Reda,
Perhaps you need to reference the QuadPlane Support section of the APM Wiki. Most of the information to get started has been documented.
Good luck!
After walter has built the vectored tilt mechanics, today we had a “vectored maiden” in QStabilize:
The vectored yaw control works perfectly !!!
(I flew deliberately low since we repaired a solder joint before)
We hope to fly the first tranistions with vectored yaw next week . Many thanks to Tridge.
Regards
Rolf
1 Like
Took my x8 up for its first semi successful hover today. Carbon fiber motor mounts are holding. The last attempt they broke under the weight of the 16,000mah battery. Now if i can just get my landing gear to stay on ill be getting close to alt hold, and autotune. https://drive.google.com/file/d/0B9egjsa9aEXWd2hFWFN5OE1UTWs/view?usp=drivesdk
Caught the alignment with the right prop as soon as the glue dried.  It’s not directly in the slipstream so I’ll see what happens when it gets to forward flight.
It’s not directly in the slipstream so I’ll see what happens when it gets to forward flight.
@GregCovey
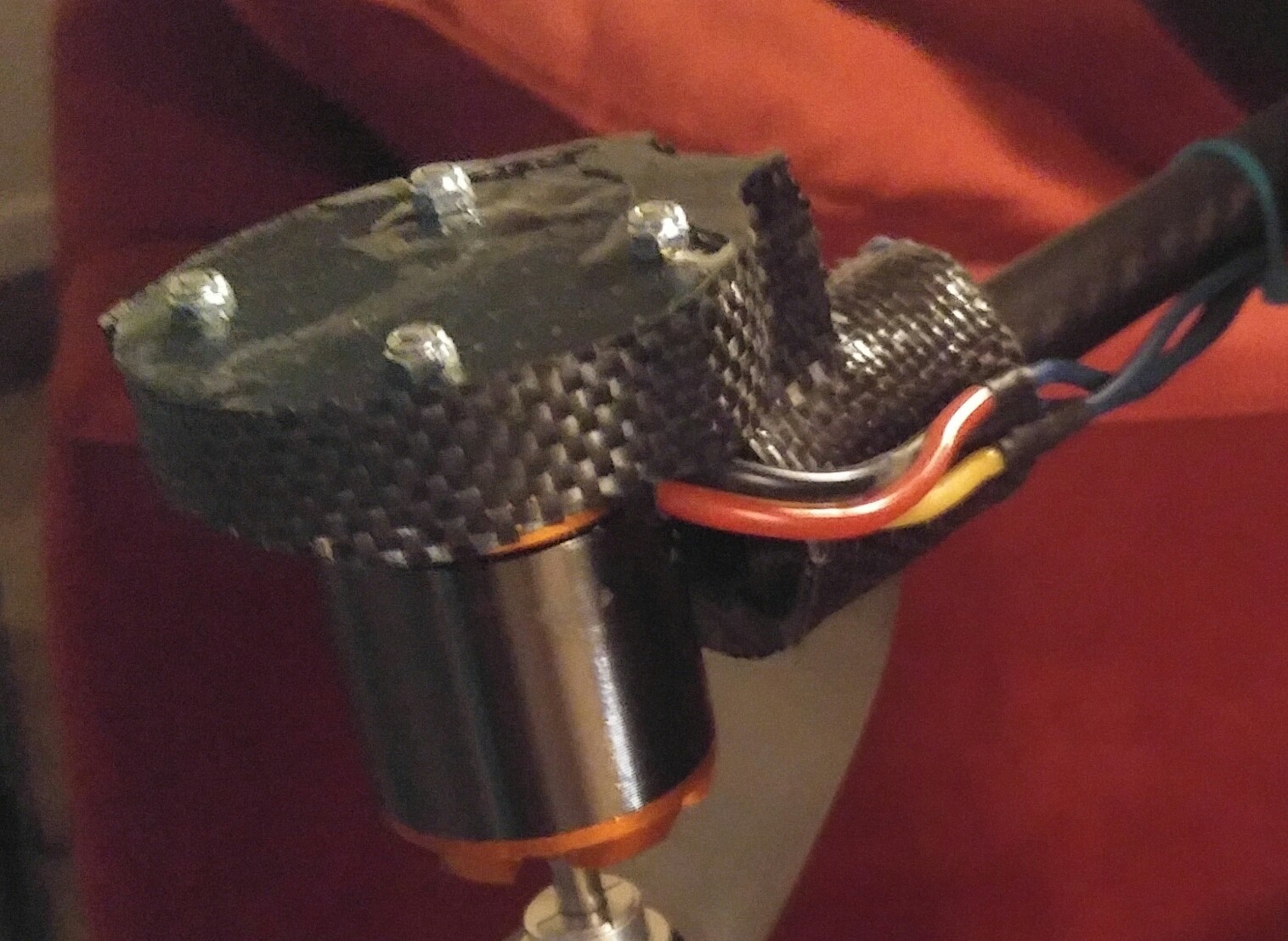
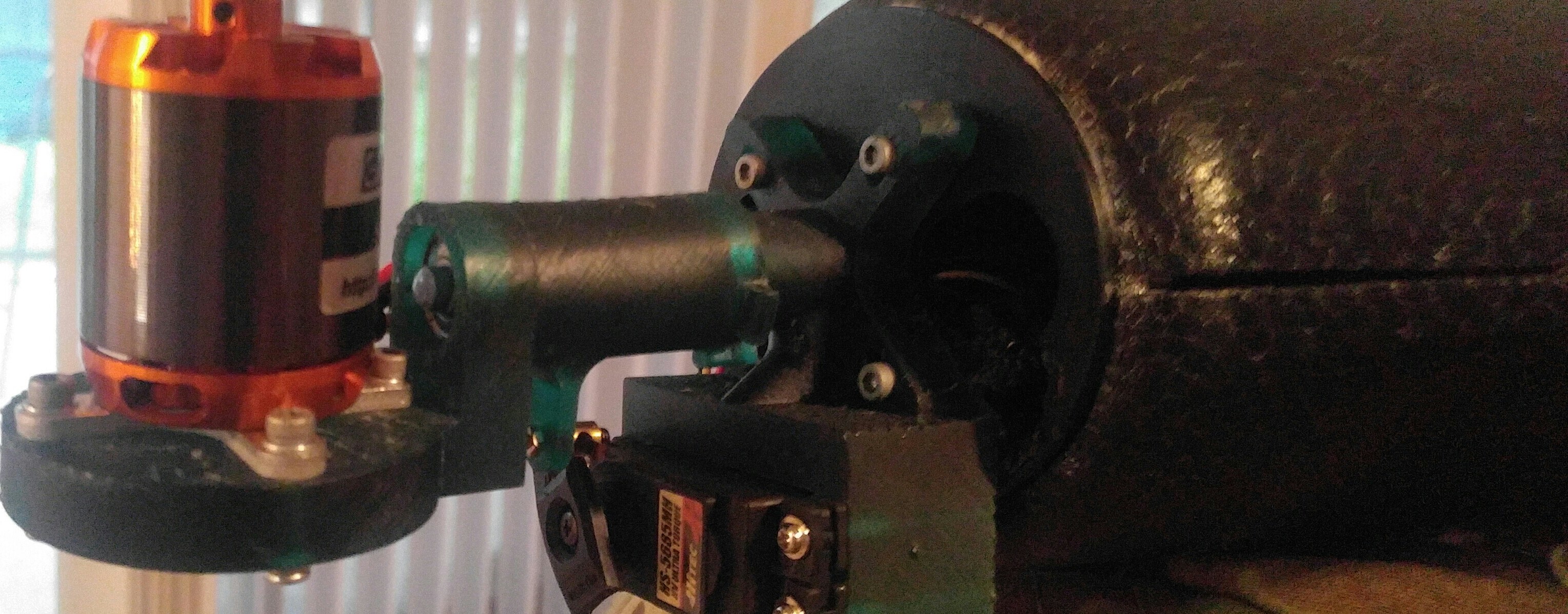
The forward tilt is simply a carbon fiber tube mounted on nylon pillow blocks and connected to a servo.
The aft is not a pretty mechanism, but it works. 3d printed, 1 hitec metal gear servo directly linked to the swiveling portion, 2 bearings and a 4mm steel shaft.

2 Likes

Good documentation, good luck with your test flight.
First transitions with vectored yaw successfull 
In the same flight we had the ms5255 instead of the 4535DO airspeedsensor installed and are also very amazed.

@Tridge: is tilt for fwd thrust already merged into master ?
We would test it in QLOITER.
Regards Rolf
1 Like
Rolf, can you post your parameters? I’m pulling my hair out I can’t get vectored yaw to work still, it’s as if it’s not ‘turned on’…
@Rolf thanks so much. Finally I have some success. I loaded your params and compared them line by line. the one that i beleive made a difference was Q_TILT_YAW_ANGLE. Mine was set to 0. Odd though I would have thought I touched upon that setting at least once… But nothing else really jumped out at me as being the culprit…
Anyways I’m still setting up the hardware and airframe.
Im used to flying planes with a ‘free’ throttle stick and multirotors with a self centering stick. I would imagine these hybrids require a self centering throttle as well?
thoughts?
and are the front motors supposed to tilt forward to move forward ? or is that gain only for fixed-for-forward-flight-only motors?
Thanks! Progress!!! 
1 Like
not yet, sorry!
I’ll post here when its done
when transitioning to a fixed wing mode, yes. When in a VTOL mode they only tilt for vectored yaw control at the moment. I plan on making it possible to tilt them for forward flight in VTOL modes too, but not done yet.
great! So glad you got that working. Is does make the tail rotor quite a bit simpler.
the one from Jordi?
yes, the one from Jordi.
