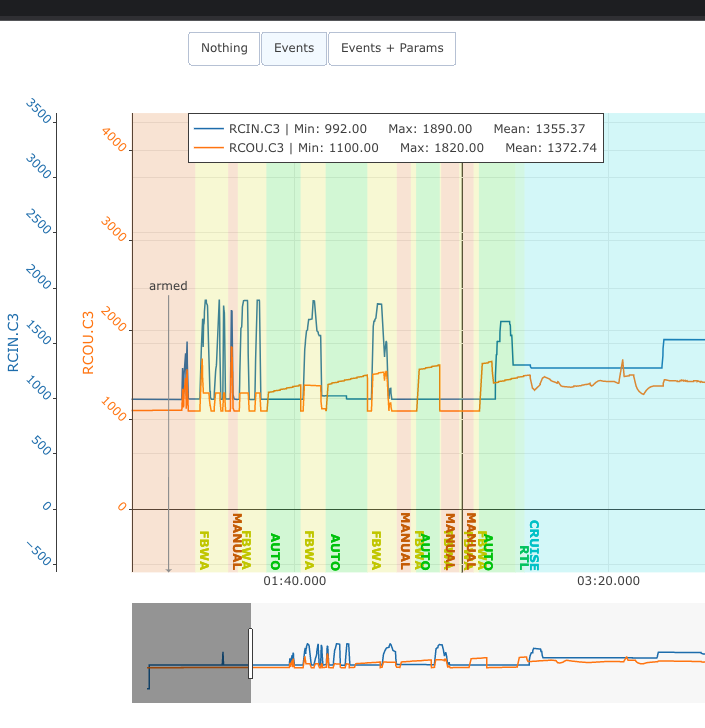
Today I experienced a wild issue after enabling compass. After arming, throttle was limited to under 30% for FBWA and AUTO Takeoff but it was normal for Manual mode. Holding throttle to the max in FBWA at full throttle it very gradually raised the limit.
RCOUT kept raising but it took almost a minute to raise either using FBWA and AUTO.
Then what is an appropriate means by which to anonymize a log? Frequently, I do not want to upload my exact location to a public site. Mission Planner only outputs .log formatted files when using the anonymize feature.
This plane crashed in the ocean, the micro SD card got damaged and computer cannot recognize it, tried multiple card readers and in one of them it gets really hot. I have the monitor video with the OSD which is not perfect and the video from the onboard camera which got corrupted but was able to recover some of it.
The plane just fell out from sky based on the OSD video this is what I see, but it would be great if others take a look and come up with a different analysis:
Plane is in Cruise.
Alt is 20 Mts.
Throttle is about 36%
Suddenly there are these message:
** EKF3 IMU0 YAW ALIGNMENT
** AHRS: EKF3 ACTIVE
Alt jumps to 54Mts.
Number of Stats apparently remains unchanged.
Throttle drops to 30%,28%13%
Amps drops from 2+ to 0.70
Again message:
** AHRS: EKF3 ACTIVE
Throttle drops to 0%
Amps drops to 0.32
My interpretation is that something glitched and the alt increased 30+ meters and because it was flying in Cruise mode Ardupilot tried to bring down the plane 30 meters but in reality it was only 20 meters above the water which ended up causing the plane to ditch into the water.
I had a similar crash happened due to EKF3 which completely destroyed my mini talon. Same EKF3 messages as yours and right after these messages, I lost total control and crashed. Here is my thread and log. Henry is investigating it and hopefully he will find something.