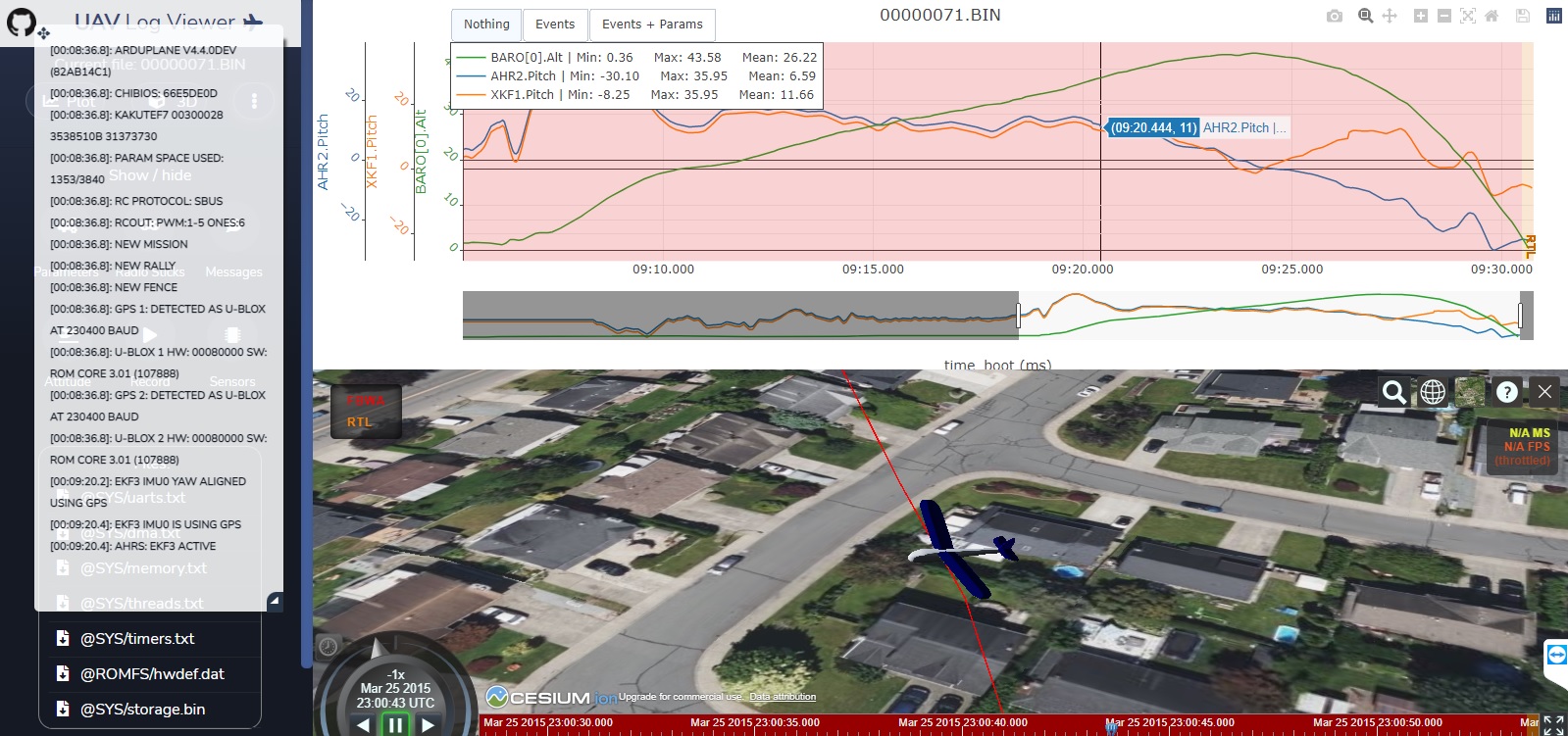
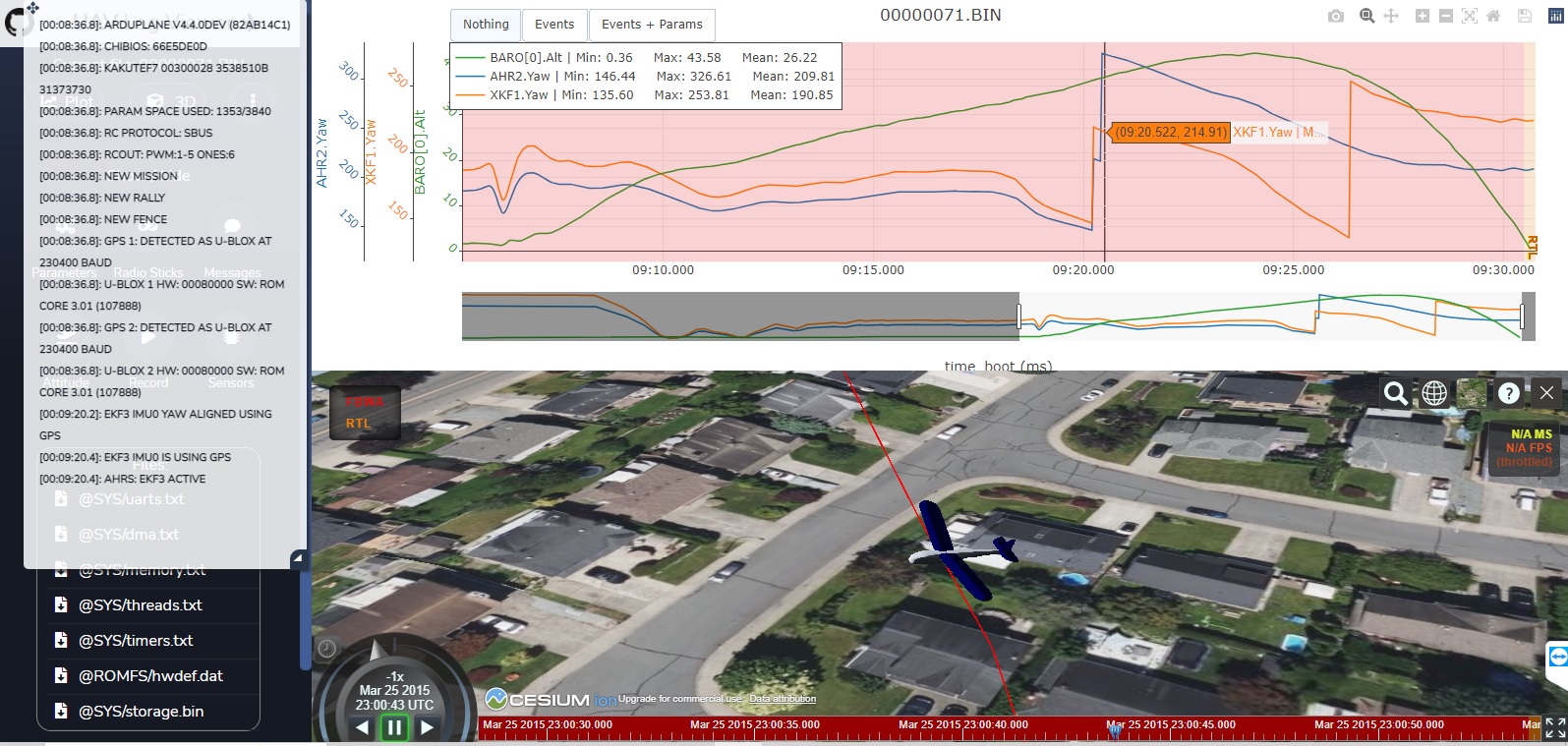
My Mini Talon went down and crashed soon after the takeoff. I lost total control right after EKF3 active and EKF3 yaw alignment message. Everything went haywire after the EKF3 initialization. Plane is write-off Home arrow started pointing to total wrong direction and on the log viewer, plane started flying sideways right after EKF3 alignment. All arming checks were in place. Not sure what happened with EKF3?
Arduplane 4.4 Dev from a custom firmware server with selected options for KakuteF7.
This was a failure of the GSF yaw estimator, which is used by EKF3 when there is no compass.
I’ve opened an issue for this, and raised it with @Paul_Riseborough in our discord EKF channel:
we’ll look into ways to prevent this happening again. Really sorry this caused a bad crash