Hi, I use ULRS( ultimate long rang system) to improve the rang of RC and telemetry signal. Everything works fine except the qground control which is the mobile version. the qground control can’t received full set. of parameters.i gues
s the lost rate too high, but it’s not too much noise in the flight field, becase the other guy using this system have the same problem. is this bug of qground control? can anyone resolve this problem?!
Screenshot_20191102_001355|690x332
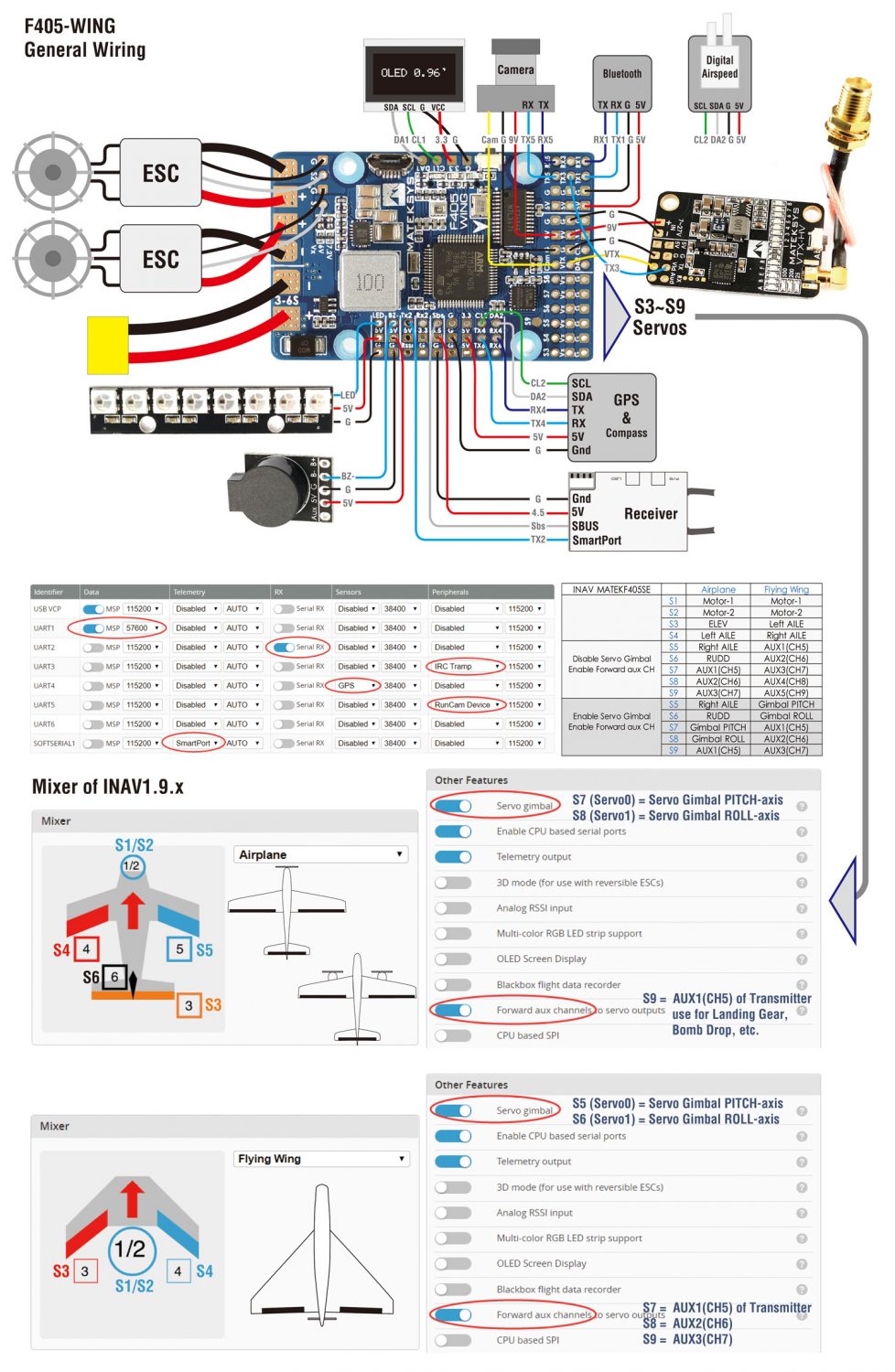
hardware: F405 wing
software: arduplane3.9.9 chibios
mission planner works fine
QGC of mobile version works fine with 3DR telemetry
{kind=link}