so I updated to version 4.1.3 and I got a new problem. when I switch to auto mode the drone falls like 1m and then going to the mission someone know about this something ? maybe parmters ?
pixhawk 4
4.1.3
with out sensor like range finder.
I need to take a close look at the log file when I’m free.
The first thing I saw is you took off with terrain altitude 30.
Also, your home and origin alt differs by almost 2 meters.
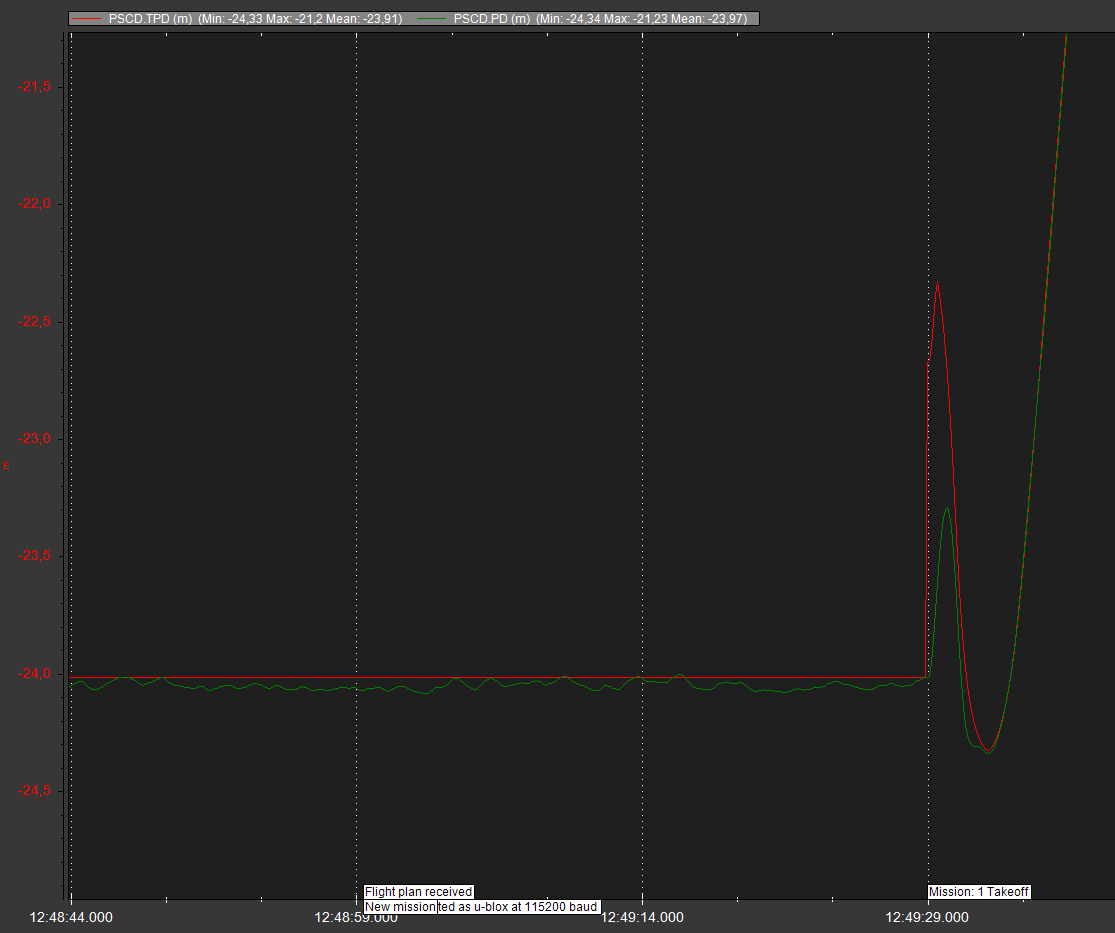
Also, PSC acts like this at the first mission item.
There is something strange going on with the takeoff command in AC4.1. I also noticed a similar issue, but only when I use the terrain altitude frame. It is probably related to your home and origin altitude differing by 2 meters.
I did some SITL testing with ArduCopter V4.3.0-dev (0ca48fa9) and the sudden jump problem seems to be fixed, but I noticed another issue. If you have a mission starting with a takeoff command in terrain frame, it doesn´t progress to the next command (waypoint) if the current above home altitude is lower than terrain AGL.
Just backport the relevant source code patches from master to whatever version you want to use.
This is not simple, but will get exactly what you want.
Be prepared for a steep learning curve.